Dobot#Part2_CR5のIO端子
Dobot のロボットコントローラにはIO インタフェースがついており3rd Party(例えばPLC・Pumpなど)と接続することができ...
Dobot のロボットコントローラにはIO インタフェースがついており3rd Party(例えばPLC・Pumpなど)と接続することができ...
この記事ではRoboDKのCurves Pathの線 表示調整のメモになります。 RoboDKプロジェクトで生成されたPathは黒線...

今回の記事ではURSimをWindows OSにインストールする方法やRoboDKと連動する手順を紹介します。よろしくおねがいします。 ...
このシリーズではDobot CR5に関連する記事です。自分も実際協働ロボットを始めたのでよろしくおねがいします。最初はDobotの箱開けイ...

今回は、RoboDK と Beckhoff TwinCAT を使って Etherent/IP ネットワークを構築してみます。スキャナ側がR...
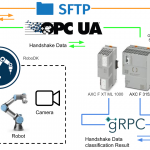
この記事ではAXC F 3152 PLCnext と最近発売し始めた機械学習モジュールAXC F XT ML1000の立ち上げ手順・デモ作...

前回はTF5430を使用しRoboDKと連携でXplanarの簡単移動を説明しました。今回はTrack機能を使用し複数の仮想Trackを作...

今回はROSをDockerにRunする方法をメモします。 Install 以下のコマンドを実行します。 docker r...
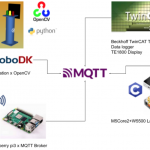
私のBlogへようこそ! 今回のProjectはRoboDKからロボットStationを作成し、ロボットが動作してる間となりにあるL...
この記事ではFANUCのロボットがどんなタイプの動きあるか、動きの切り替えとか、それらの動きのコマンドはどういう意味なのか、それらを変更し...