前書き
自分使ってるOSはUbuntu18.04.03です。
http://wiki.ros.org/ROS/Installation
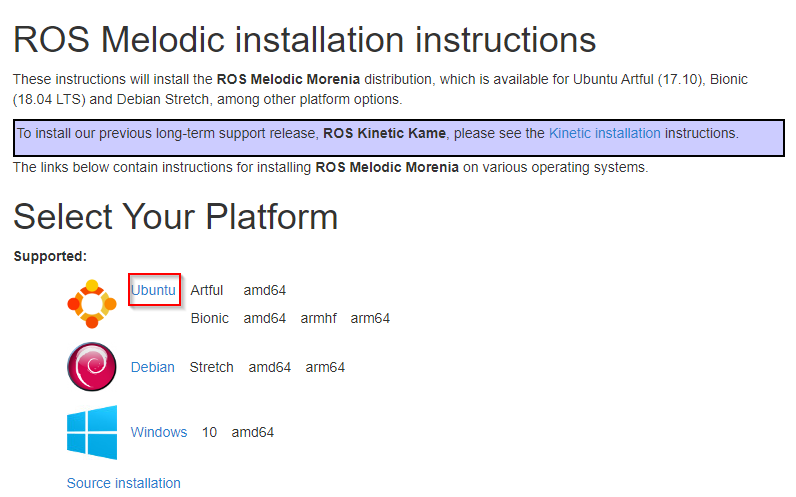
使ってるOSバージョンに合わせてROS Melodic Moreniaを使用します。

Ubuntuを使用しますので、こちらのPlatformをクリックします。
http://wiki.ros.org/melodic/Installation
LINKはかなり詳しい情報書いていますが、インストールする手順や説明をメモします。
http://wiki.ros.org/melodic/Installation/Ubuntu
Source file listセットアップ
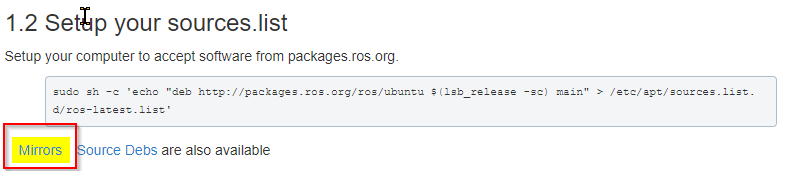
自分のMachineをpackages.ros.orgからソフトウェア受けれるようにセットアップします。
>Setup your computer to accept software from packages.ros.org.
Mirrosをクリックします。
自分は最初に日本のCommandをCopyし実行しようと思いますが、なぜはうまくインストールできませんでした。なんだかKeyの問題とか。ChinaのCommandなら行きました。
http://wiki.ros.org/ROS/Installation/UbuntuMirrors
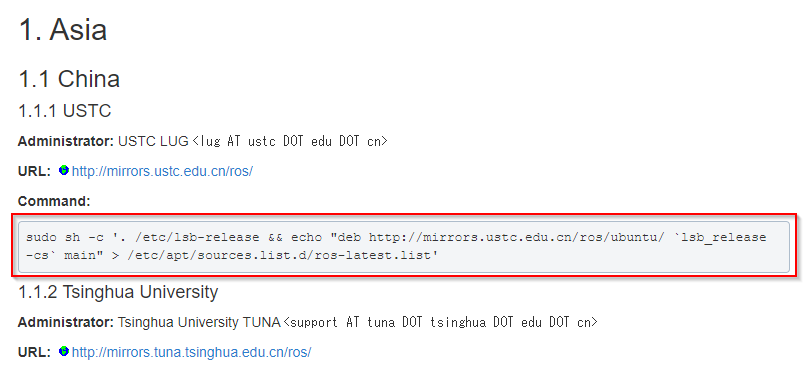
赤枠のCommandそのままCopyし、実行。
| sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main” > /etc/apt/sources.list.d/ros-latest.list’ |
Keyのセットアップ
| sudo apt-key adv –keyserver ‘hkp://keyserver.ubuntu.com:80’ –recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
もしKeyserverが問題あれば、以下のServerを試してください。
hkp://pgp.mit.edu:80
hkp://keyserver.ubuntu.com:80
こうになりますね。
インストール
まず、PackageのIndexを最新にします。
>First, make sure your Debian package index is up-to-date:
| sudo apt update |
Desktop-Full Install
ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators and 2D/3D perceptionなど入っていまる。
| sudo apt install ros-melodic-desktop-fullapt search ros-melodic |
ちょっと時間立ったら…よし。
環境セットアップ
ROS環境の変数追加などはBash Fileを作って実行するほうが便利でしょう。
| echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc source ~/.bashrc |
ROSInstall
このToolはROSのPackageを簡単ダウンロード・管理できそうなので、入れます。
| sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential |
初期化
| sudo apt install python-rosdep sudo rosdep init rosdep update |

環境テスト
ここまできてお疲れ様です。次は環境テストしてみます。
http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment
環境変数Check
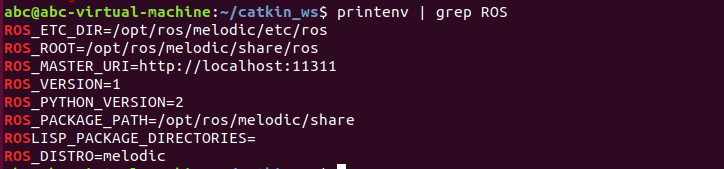
$ printenv | grep ROS
もし環境変数がOKあればこのような出力が出ますが。エラーなら、
以下のコマンドでSetupしてください。
| source /opt/ros/<distro>/setup.bash |
最初には本当にそのまま入れてもちろん、だめだよね。自分がインストールしてるROSの名前入れないと。バカですね。自分。

ROS Workspace作成
説明ではMelodic以下のバージョンだとコマンド少しわかります。

| mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3 |
catkin_pkgというPackageがないと怒られました。
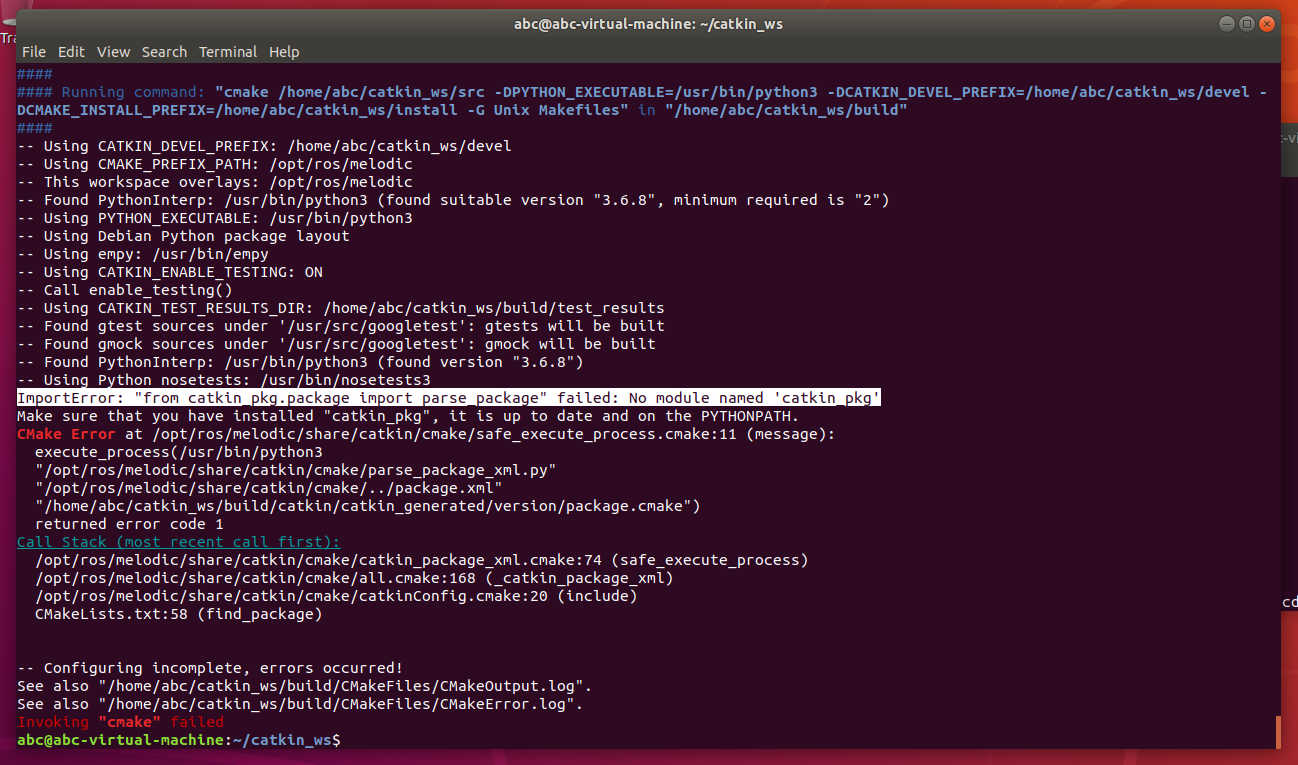
答えはここにあります↓
https://answers.ros.org/question/126471/cmake-failed-catkin_pkg/
| pip3 install catkin_pkg |
無事に終わり、です!
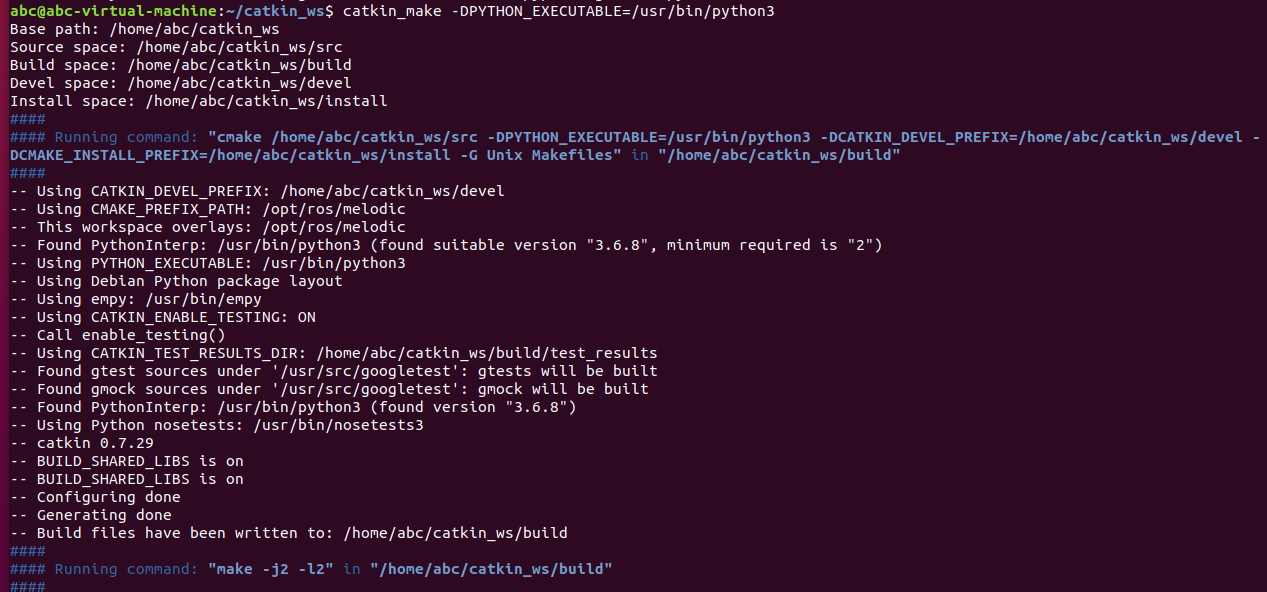
もしいまあなたのDirectoryみますと、’build’ と ‘devel’ Folderが作成されています。’devel’ の中にはいくつのsetup.*sh filesが入っています。
>Additionally, if you look in your current directory you should now have a ‘build’ and ‘devel’ folder. Inside the ‘devel’ folder you can see that there are now several setup.*sh files. Sourcing any of these files will overlay this workspace on top of your environment.

いまのWorkspaceはsetup scriptにOverlayedかどうかを確定します。ROS_PACKAGE_PATHの環境変数はいまのDirectoryに入ってると確認しましょう。
>To make sure your workspace is properly overlayed by the setup script, make sure ROS_PACKAGE_PATH environment variable includes the directory you’re in.
| echo $ROS_PACKAGE_PATH |

次はROSのコンセプトについて勉強し、ROS File systemもみてみます。
Robotが動かすまでまだ道が長い、です…