みんなさんこんにちわ。今回の第5話は少し基本なことを戻り、JOINTとWORLDについて話しします。基本的にはROBOTを動かすには2種類があり、それはJOINT(各AXIS単独で動く)とロボットのFrameに動くです。
こちらは前の記事です:
JOINT
前が書いてた通り、軸ことに動くのイメージであなたの指が同時JOINT MODEで2軸のボタンを押すのであれば2軸同時動きますし。難しくない。
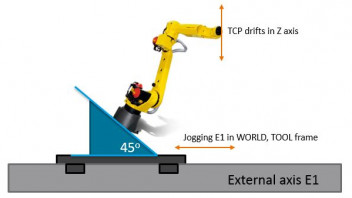
アプリケーションによってExternal 軸がついてるの場合もあり(例えばロボットがRAILに取り付けられ動くとか)
Teach Pendantを起動し、COORDボタンでJOINTに切り替えましょう。

そして+-でSpeed調整してください。まぁ、最初は5%でゆっくり動きながらSPEED UPでよいでしょう。
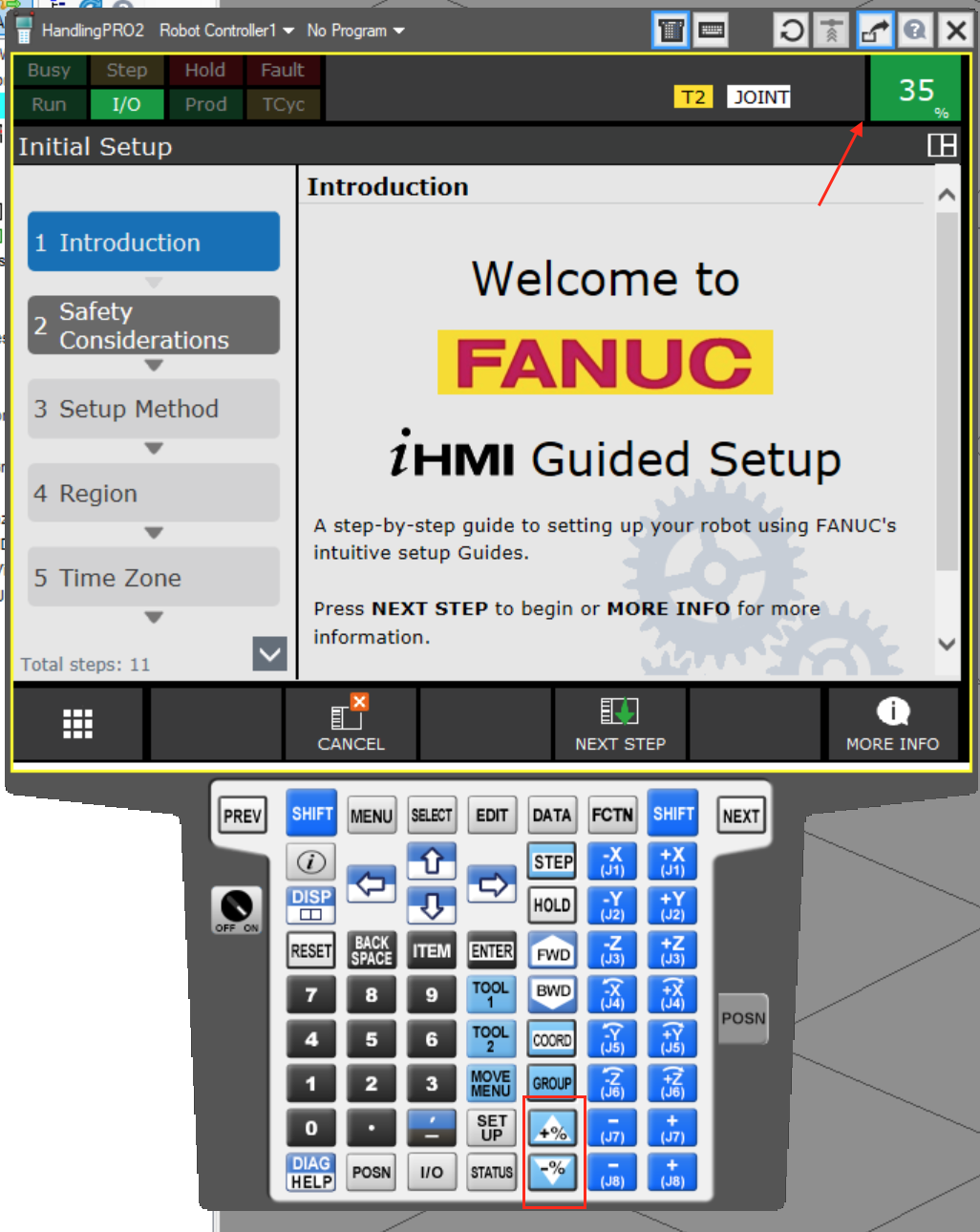
最後はSHIFTと+x,-yなどと一緒に押してみましょう。

このように、JOINTは軸ごとに動いていますね。
WORLD
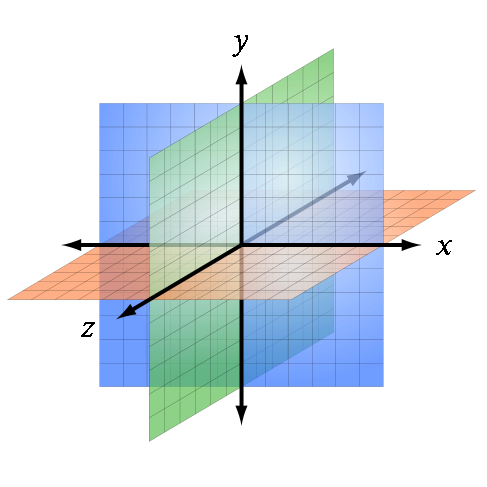
次はWORLDについて話ししましょう。WORLDを話す前まず一旦中学の数学に戻りましょう。Cartesian Coordinate Systemってみんなさん覚えてるでしょうか。簡単にいいますと方眼紙があり、紙の上にXY座標が書いてて何マス数えての練習です。ロボットではこのルールも応用しています。
P(x,y)
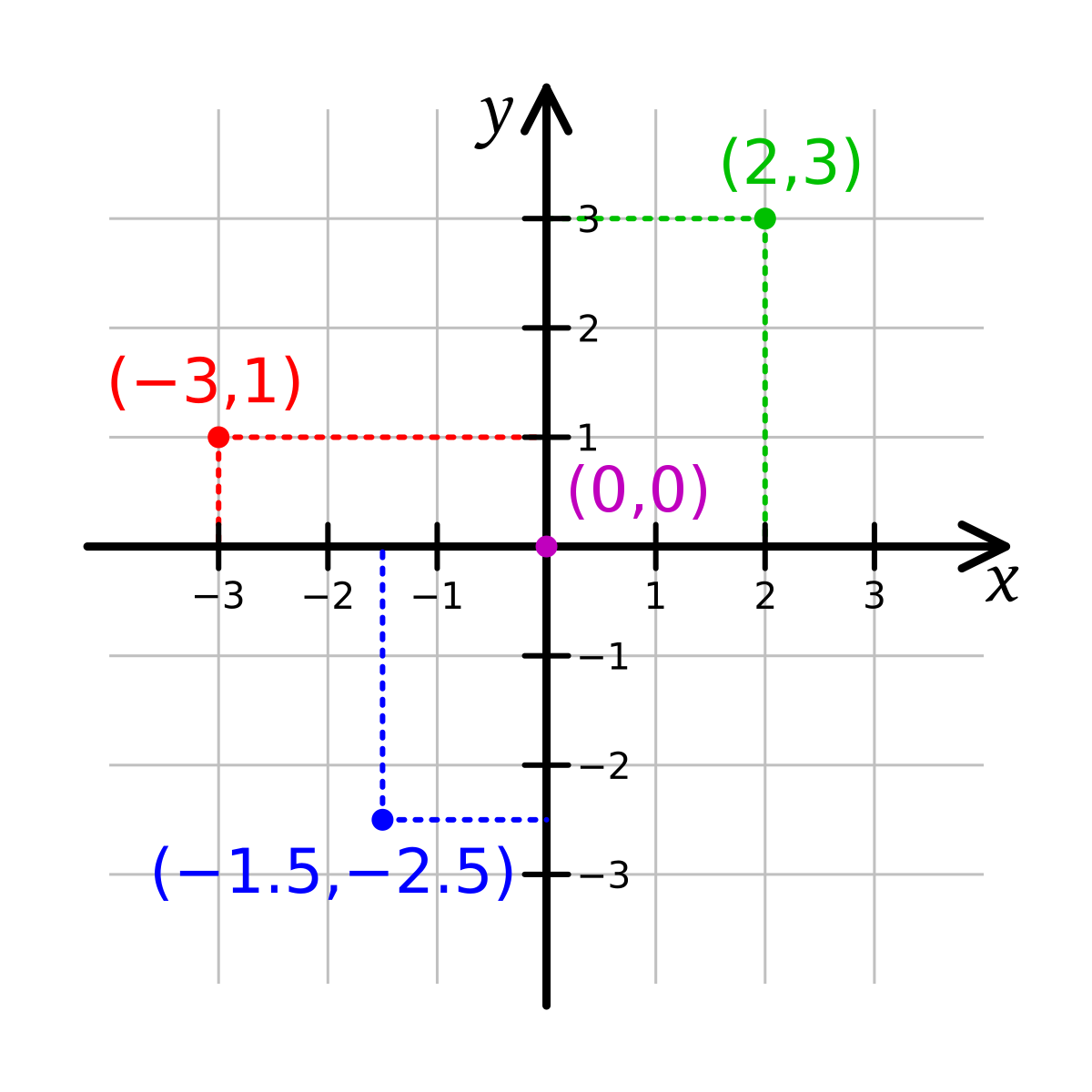
だけど、XYだけではなく、XYZになります。P(x,y,z)のように、計算の話になると複雑になりますと、また機会あれば説明しますね。とりあえず頭の中にこのXYZにを覚えて置いてください。この記事ではずっとこの子の話ししますので。
World Frameとは?
では、World Frameはなんだ?の疑問がくるかもしれません。簡単にいいますと、World Frameは”いつも同じな場合に固定されてる”のところになります。いまあなたがロボットの隣で立てると想像してみよう。Baseにあるロボット軸1の中心から軸2のモータまでのところはあなたがWorld Frameです。

RIGHT HAND RULE
先ほどCartesian Coordinate Systemの話出ましたよね。それを簡単にROBOTがどんな方向動くなるような確認方法は、そのRIGHT HAND RULEです。ロボットの前後方向はXで、左右はYで上下はZになります。
Teach Pendantを開き、WORLDに切り替えましょう。

そしてTeach Pendant上で+XYZなどのボタン見えますね。
実際動かしてみますと、ロボットが直線で動かすようになっています。
ここまで来たら、JOINTとWORLDの違いは少しわかりましたか?
もしJOINT使うと私たちは軸ことに動かし、”End Effector”がどこいるのか把握できません。一方でWORLDで動かすだとどんな動きだと想像つくようになります。
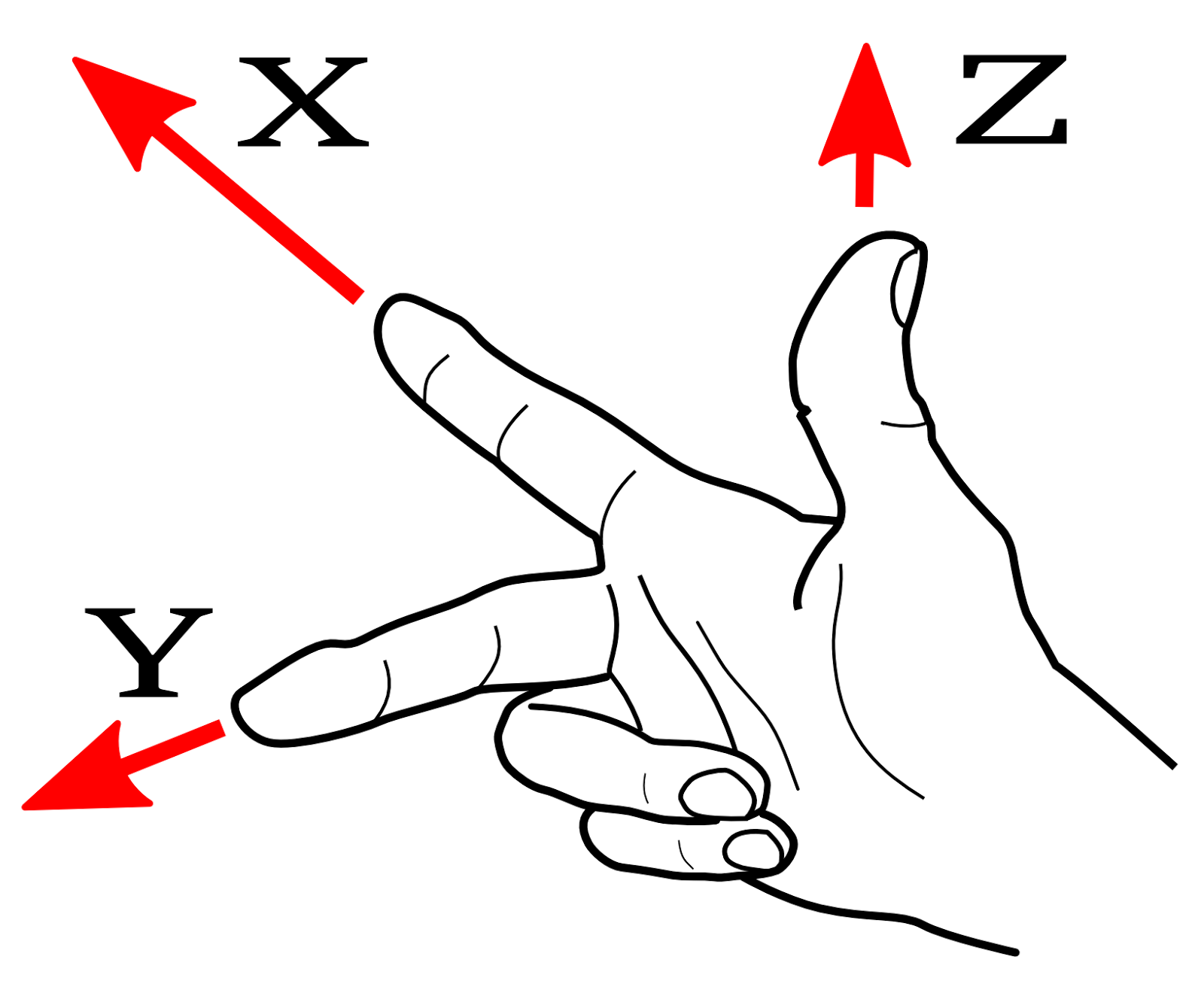
ではXYZの回転どうしますか?同じく参照できるルールがあります。下図のように指を出して、親指は方向を示し、他の指がが指してる方向はこの軸の回転方向になります。

これは実際の動きですね!
最後に
はーい、お疲れ様ーです。
今回はJOINTとWORLDの違いや操作など簡単に説明しました。これがわかった時点で次回はTeachingなどついて説明したいと思います。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。
