今回の記事ではURSimをWindows OSにインストールする方法やRoboDKと連動する手順を紹介します。よろしくおねがいします。
URSim?
URSimはURから提供されたOffline Programとシミュレーションソフトです(実機と繋がらないともちろん100%の機能を再現できませんが)もしSimulation Modeが有効になった場合、DIもシミュレーションできます。
そして今回の記事ではURSimをWindows OSにインストールする方法やRoboDKと連動する手順を紹介します。
注意するのはURSimはWIndow上で実行するには仮想OSのソフトが必要です。(例えばVMwarePlayerやVirtualBox、それはURSeimはLinux向けに作られたので)
そしてURSimの中にUR3e/UR5e/UR10eのシミュレーターが含まれています。
(同時に複数のシミュレーターを動かすことができません)
What you need?
最低限そのようなものがあればOkです。
- ハードディスクに8 GB 容量
- 最低限1280×800の解像度
- 仮想ソフト
- 7Zip
Reference Link
Downlaod the URSIM Images
下記のLinkからURアカウントを登録しURSIMをDownloadしてください。
Install Images with VMWare
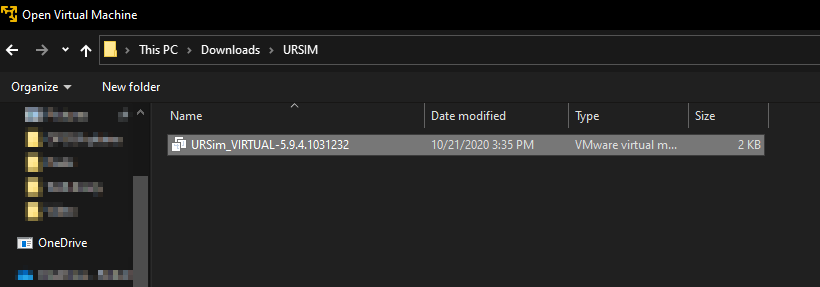
DownloadしたFileを解凍します。
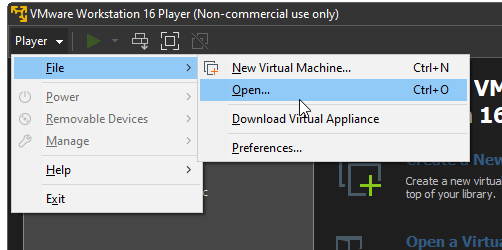
VMwareを起動します。
File>Openします。
先ほど解凍したFileを選びます。
URSIMがインストールされたOSをVmwareに追加しました。
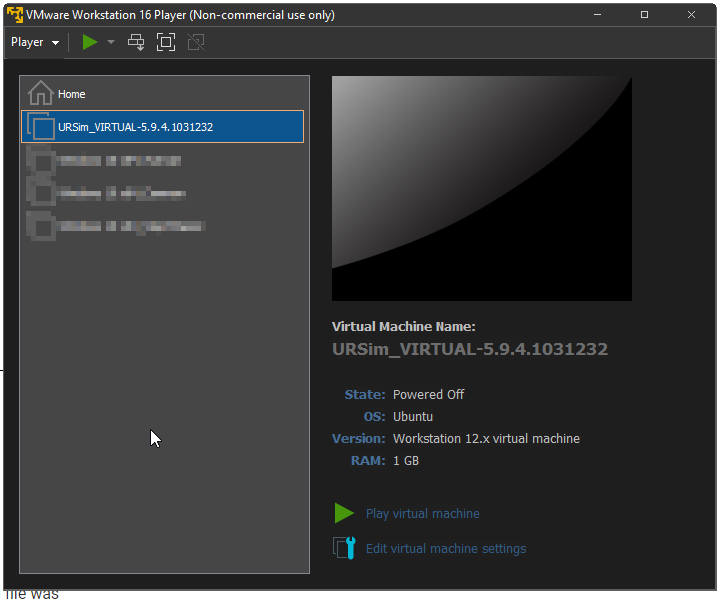
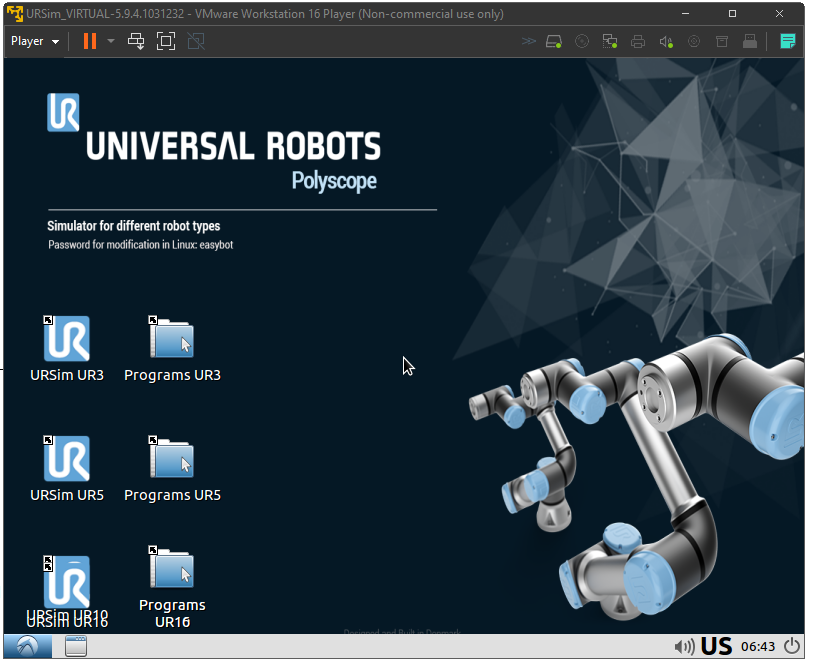
Done!URSIMのOSが起動できました。
Setup Shared Files
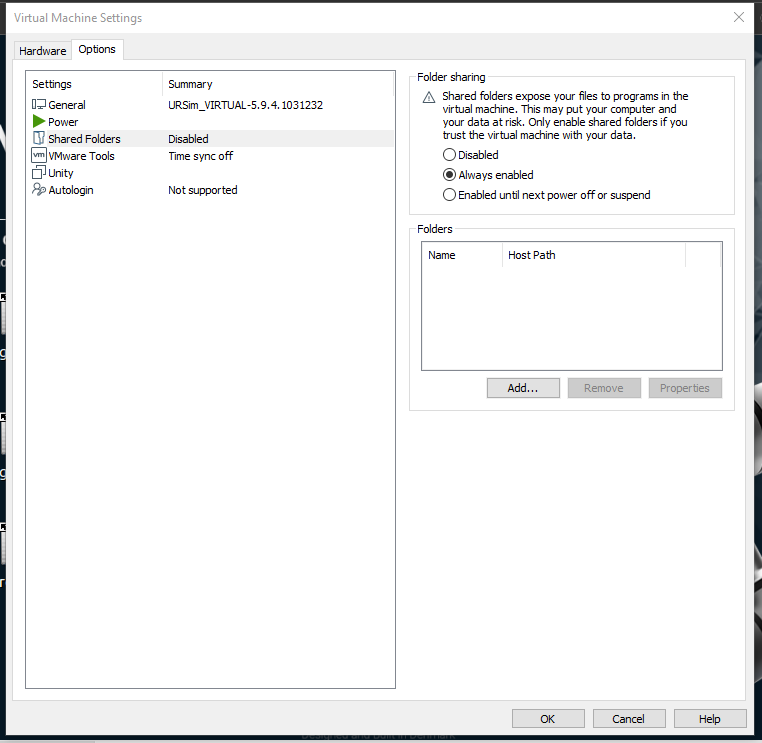
必ずではありませんが、VMwareで共有フォルダの設定方法も紹介します。
Options>Shared Folderを選び、Addで新しい共有フォルダを追加します。
Next>で進みます。
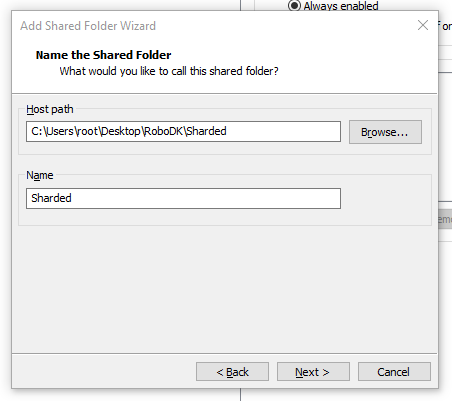
BrowseでHost PCの共有フォルダを設定します。

共有フォルダの名前を設定しNext>で進みます。
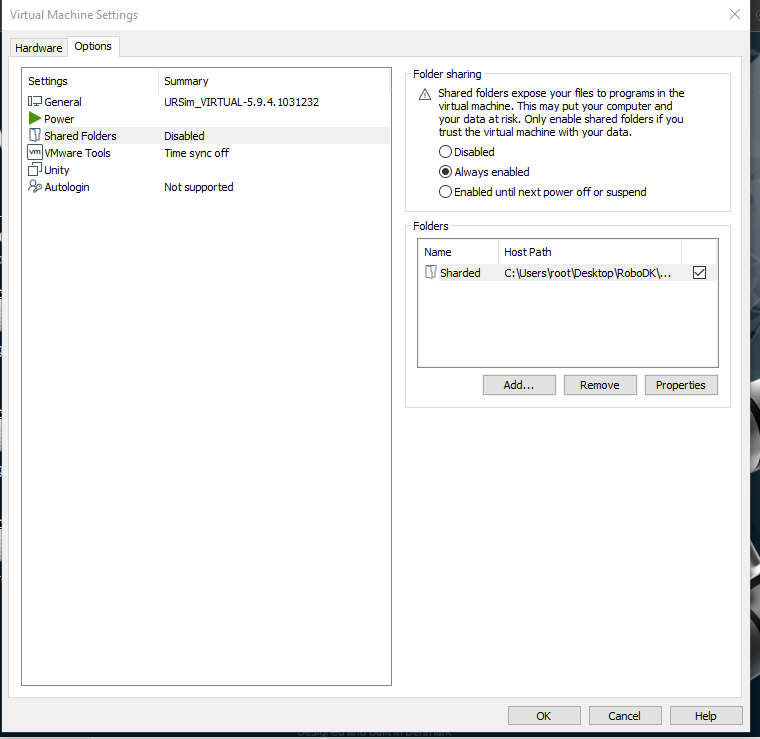
Enable this shareのCheckboxをいれ、Finishで完了。

OKで完了。
Play with URSIM
Launch UR3
URSM UR3を例として説明いたします。URSIM UR3をダブルクリックします。
しばらく待ちます…

Done!
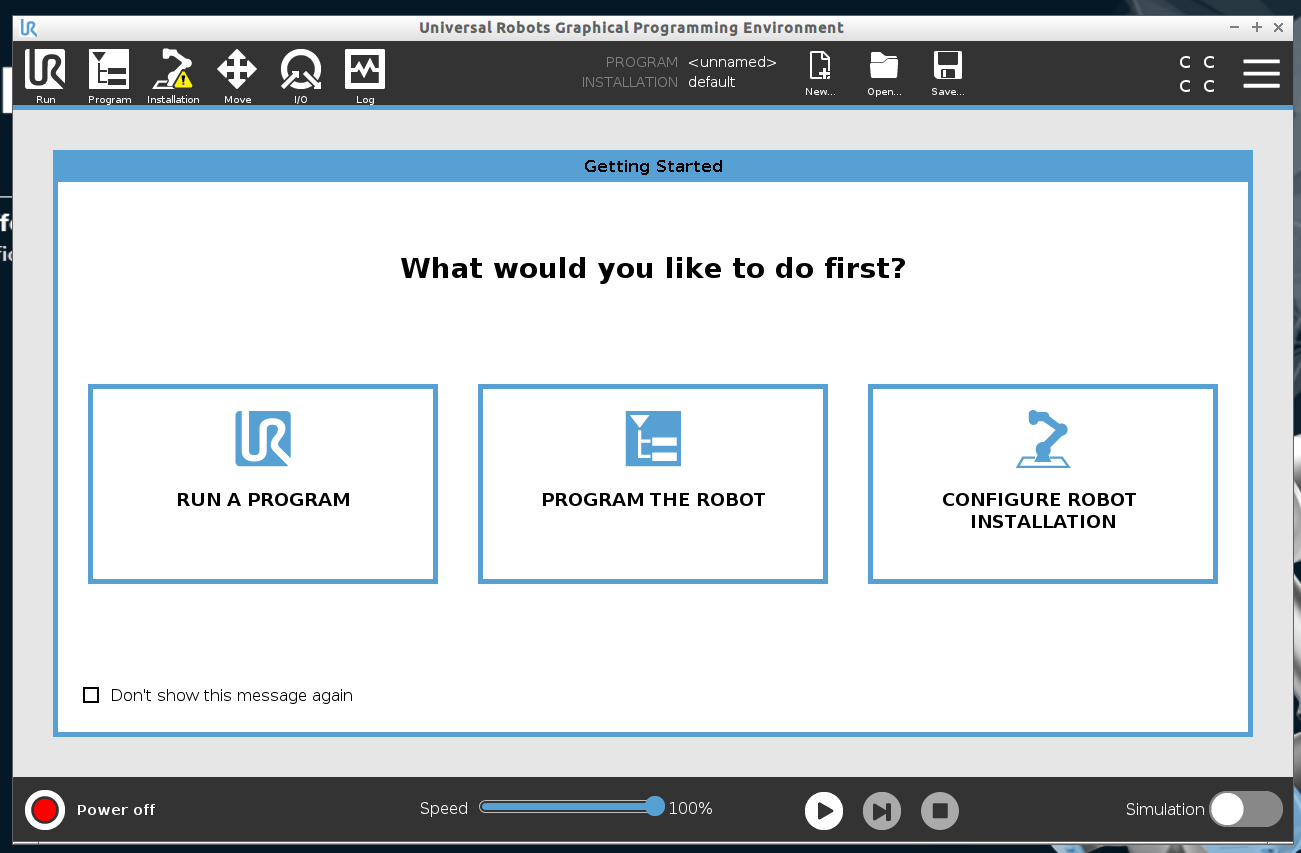
Power ON
Power offのところをクリックします。

ONボタンをクリックしUR3の電源を入れます。
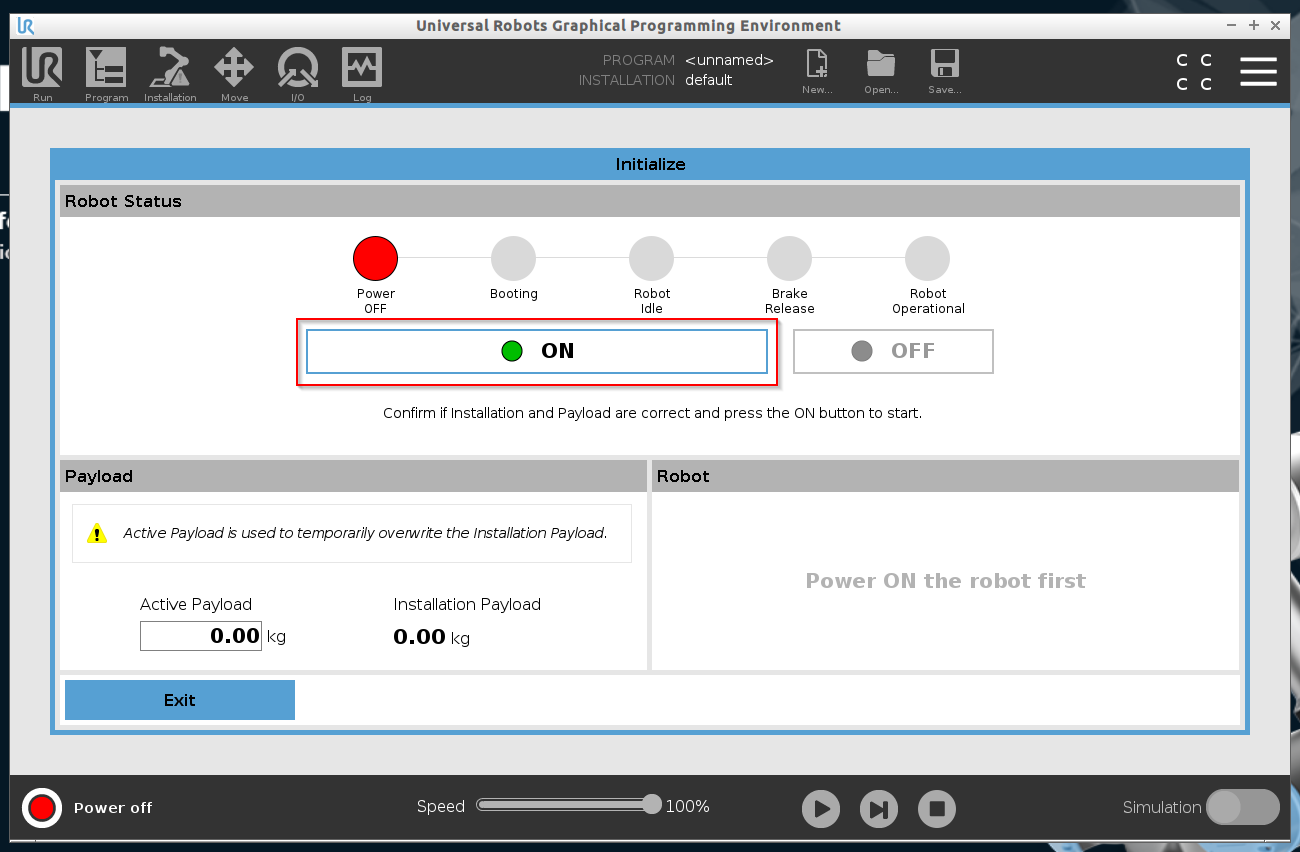
Done!電源を入れました。
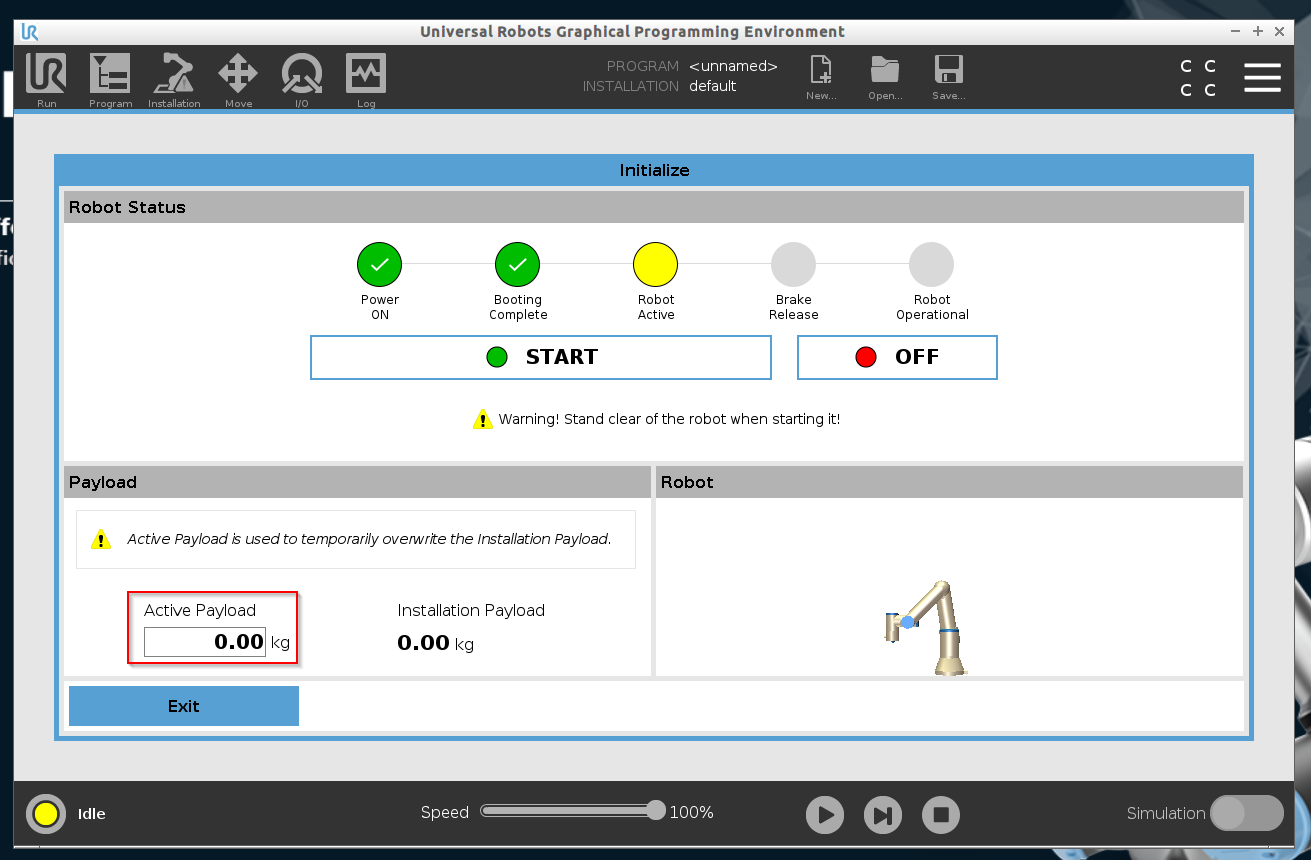
Payload
次はUR3のPayloadを設定します。Default=0.00kgでクリックすれば設定変更が可能です。
数字のKeypadが表示されます。
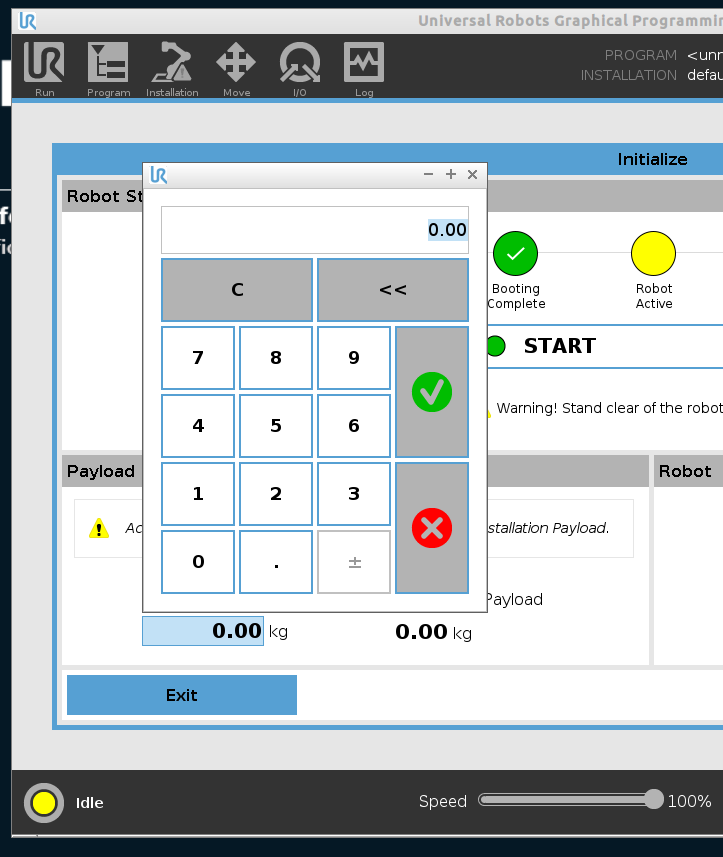
今回の記事で1.0kgを設定します。
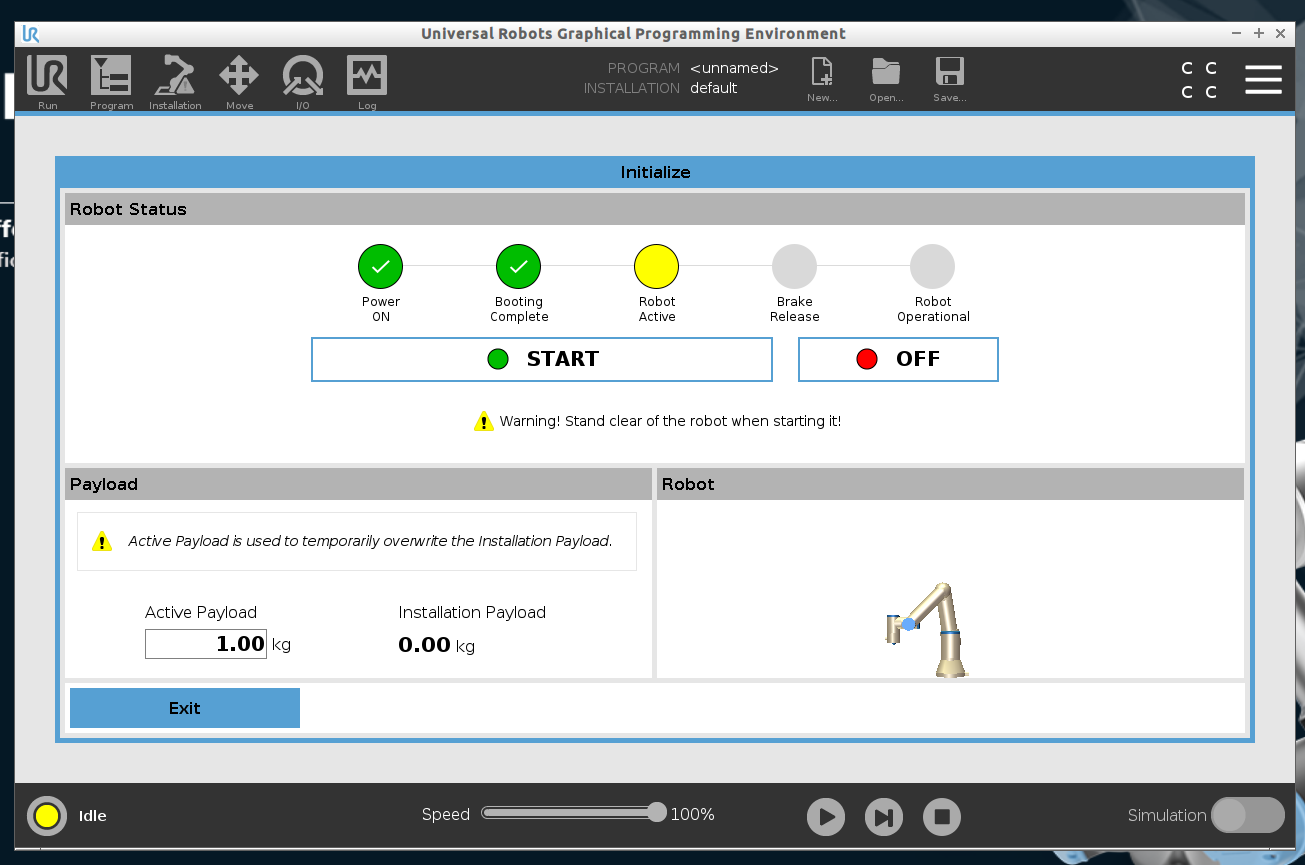
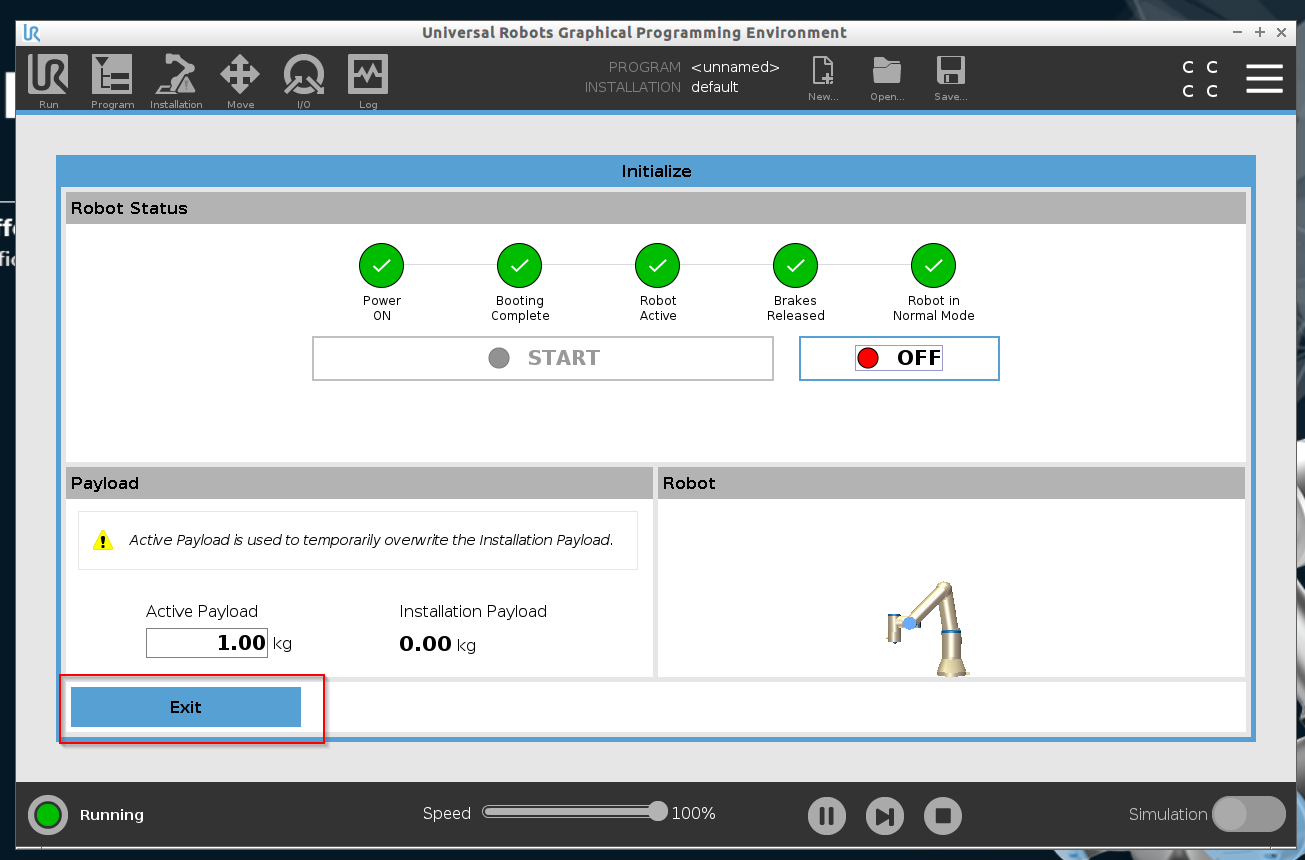
Start Your UR3
最後はSTARTボタンをクリックしUR3を起動します。

よし!電源も入れました。
最後はExitで完了しましょう。
Move it
次はURSIM上でUR3を動かしてみます。MOVE ICONをクリックします。
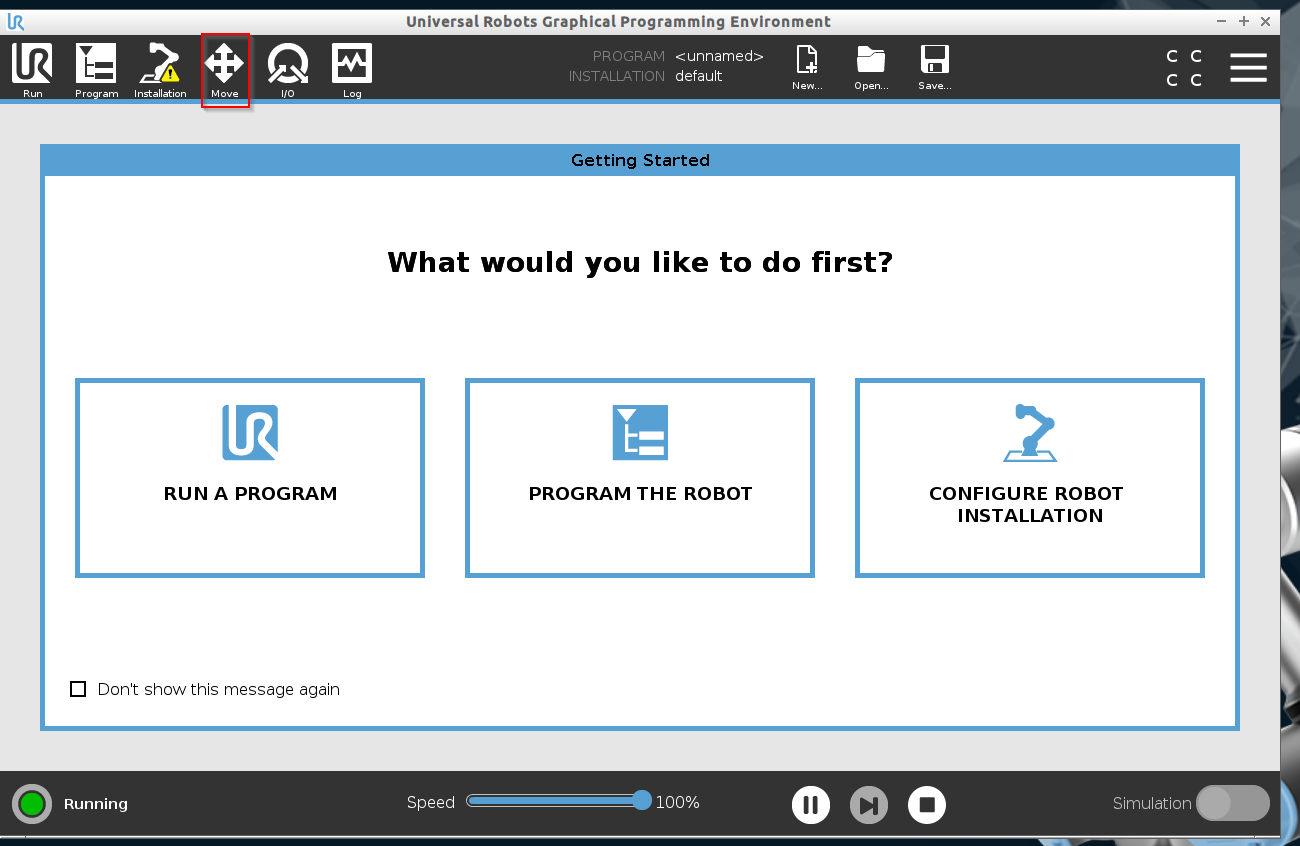
ロボットの操作やJointの現在値表示などの画面に変わります。
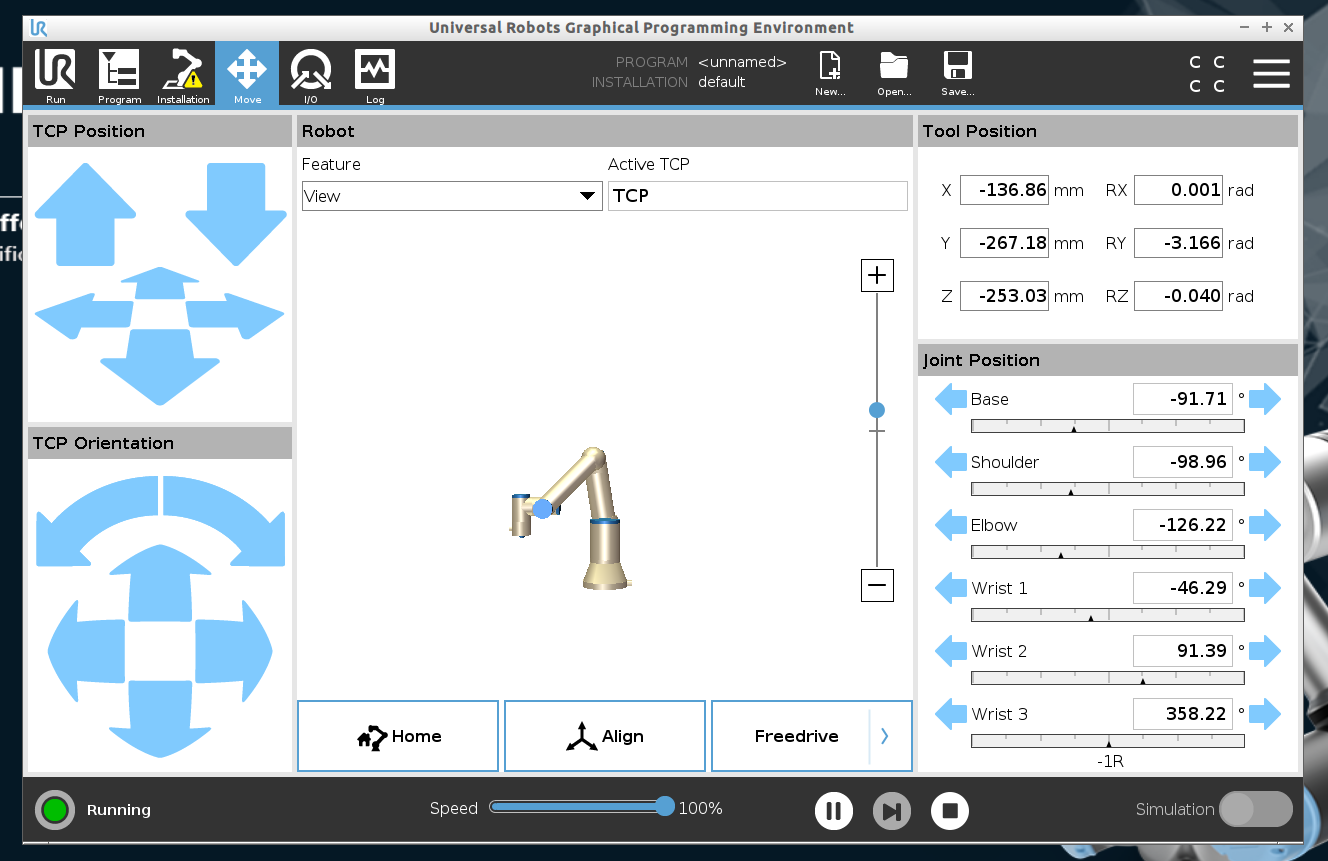
このようにクリック操作でロボットを操作できます。

Play with RoboDK
次はURSIMをRoboDKから動かしてみます。
Download UR3 Library
RoboDKを起動し、地球ICONをクリックしRobot Libraryを開きます。

Browserが自動起動され、Robots>Universal Robtos>UR3を選びます。

UR3を選び>OpenでRoboDKからLibraryを開きます。

”RoboDKを開く”のボタンをクリックします。

UR3がImportされました。

Create a simple program
次は簡単なロボットプログラムを作成します。

Setting On URSIM
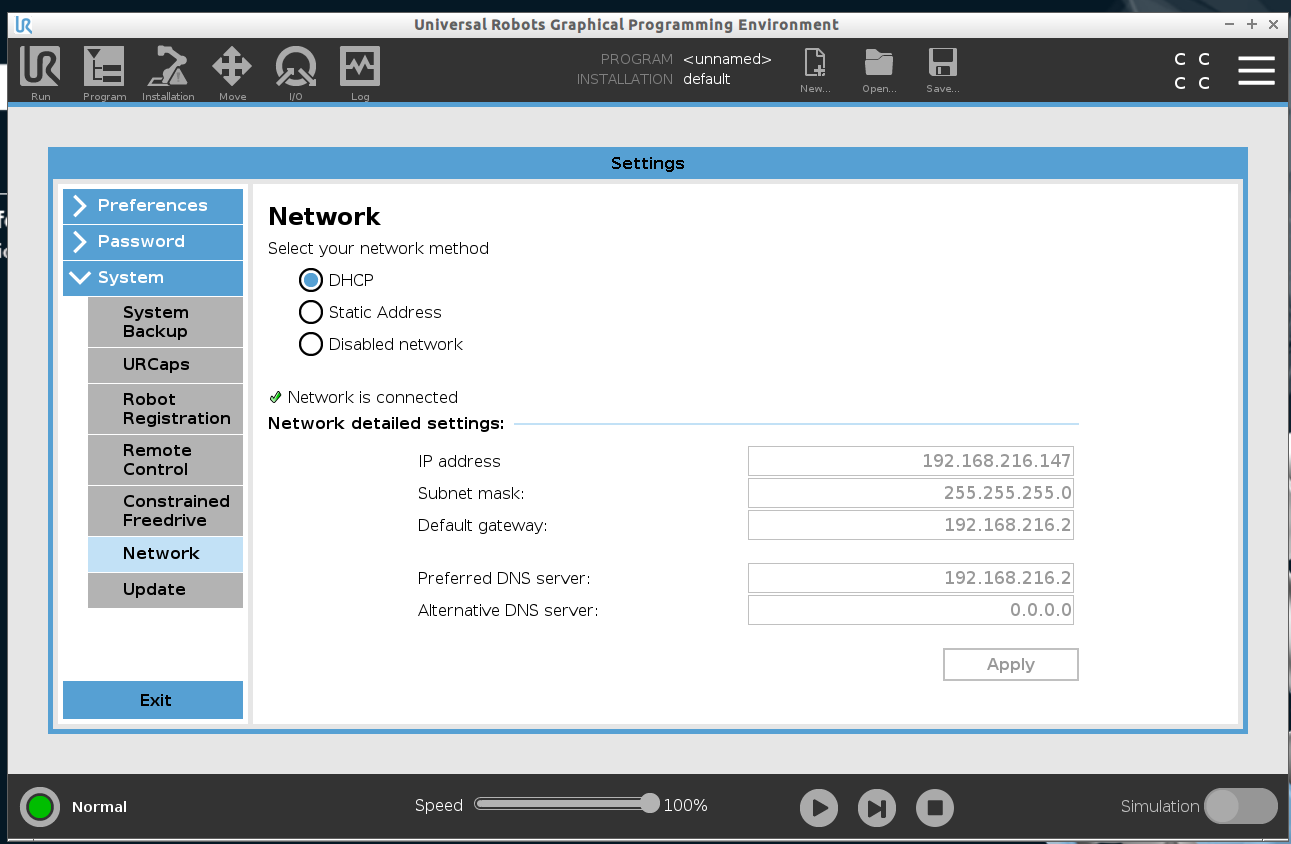
URSIM側にもNetworkの設定が必要でSettingsをクリックします。
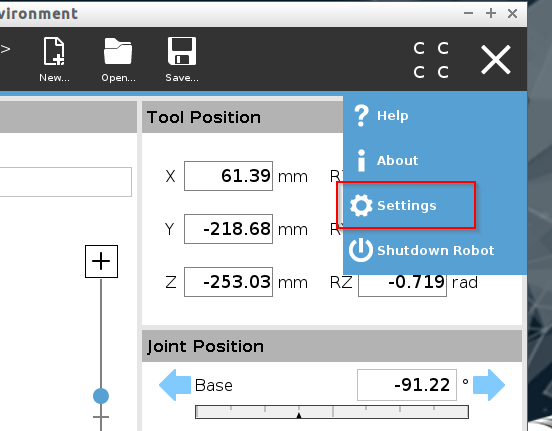
System>Networkを開いてURSIMのNetwork Adapterを設定しましょう。
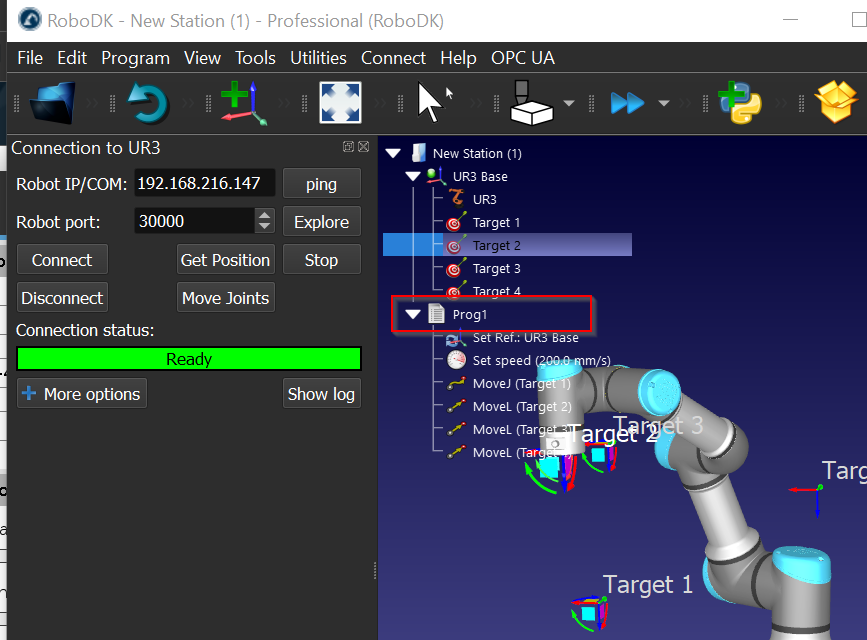
Connect Robot With RoboDK
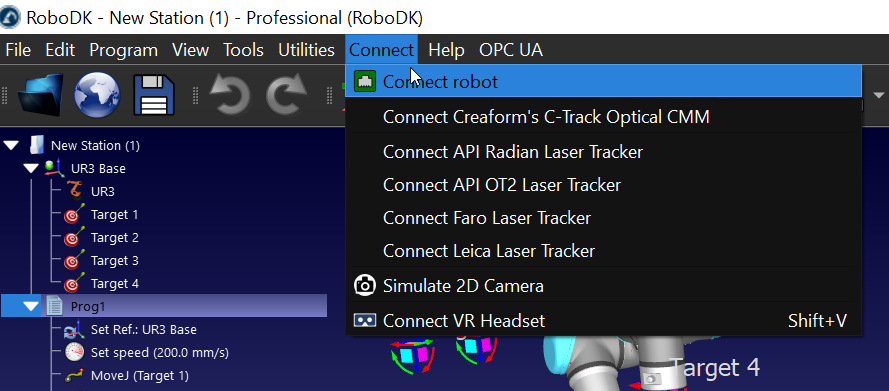
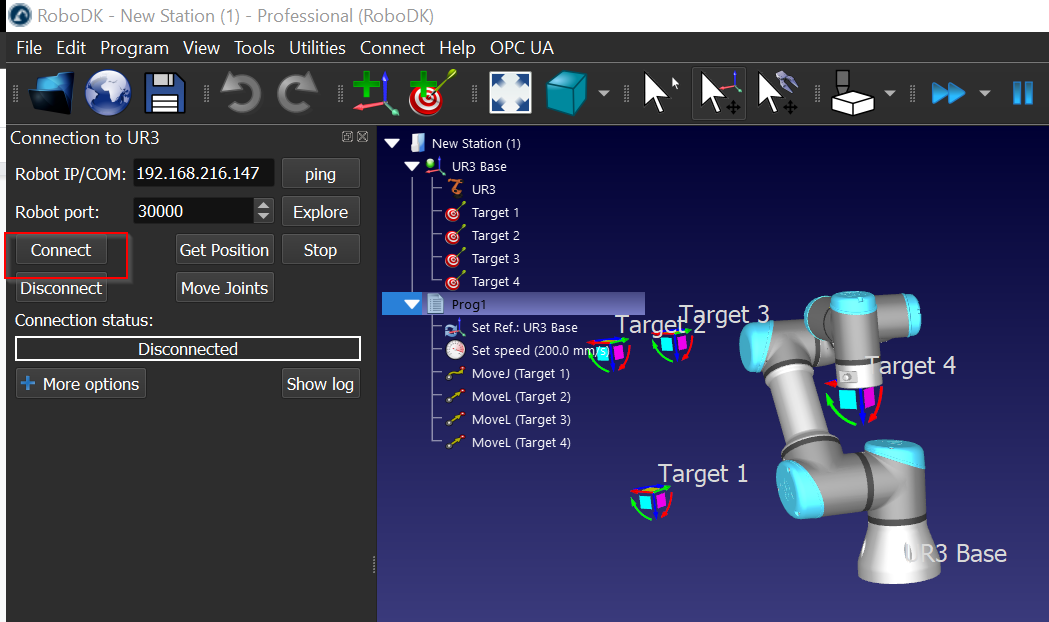
Connect>Connect robotを開きます。
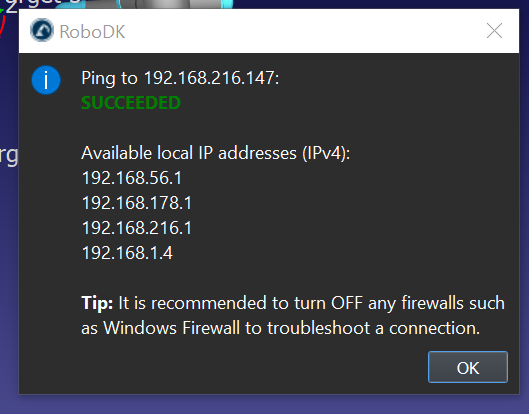
まずPing機能を使用しURSIMと通信してるかをCheckしましょう。
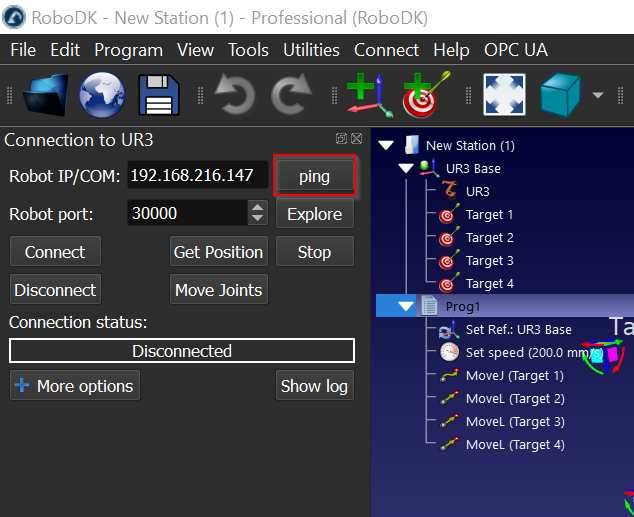
Great!PingはOKです。
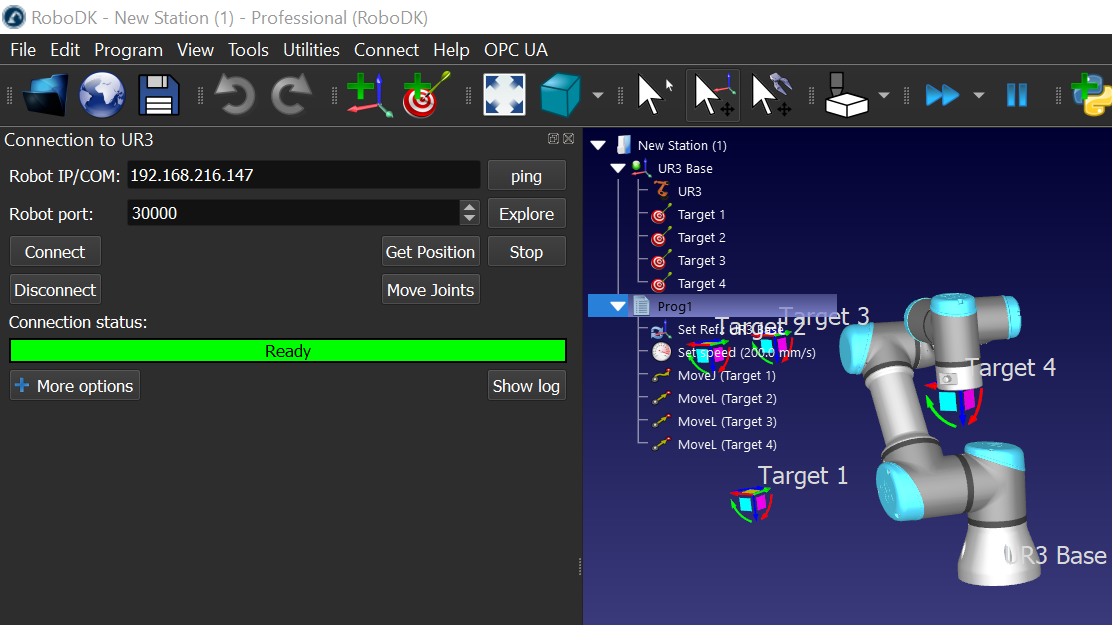
次はConnectボタンでRoboDKとURSIMを接続します。
Done!StatusはReadyになり、つまり接続成功です!
Get Position
最初には”Get Position”ボタンをクリックしURSIMの現在位置を取ります。

問題なくURSIMから位置情報を取得しました。
Move Joints
次はRoboDKからURSIMにJoint移動命令を送信します。移動したい位置を設置し、”Move Joints”ボタンをクリックします。
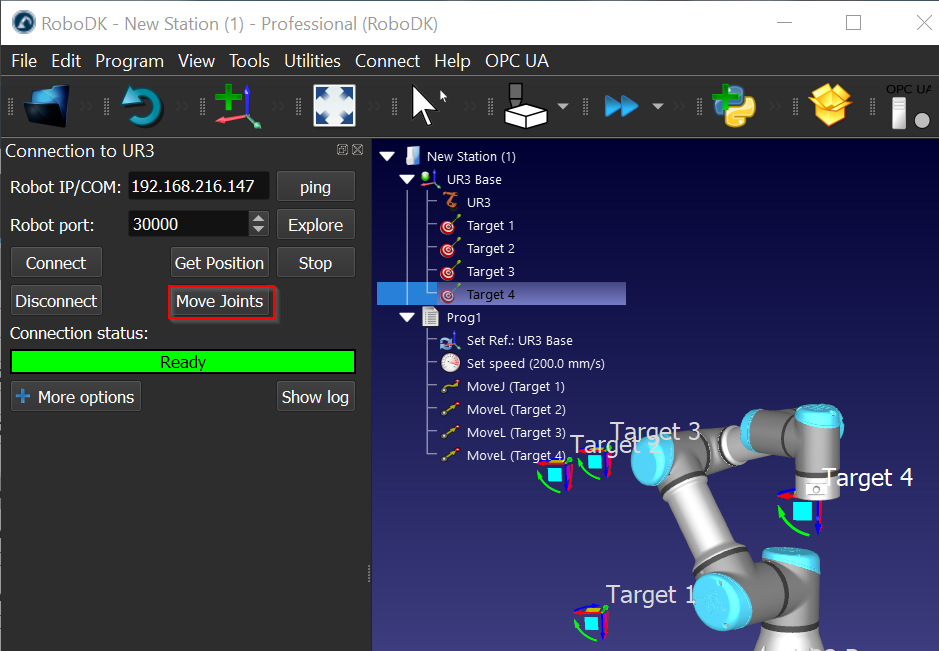
StatusがWorkingになり、URSIMがRoboDKの動きと同じようになります。

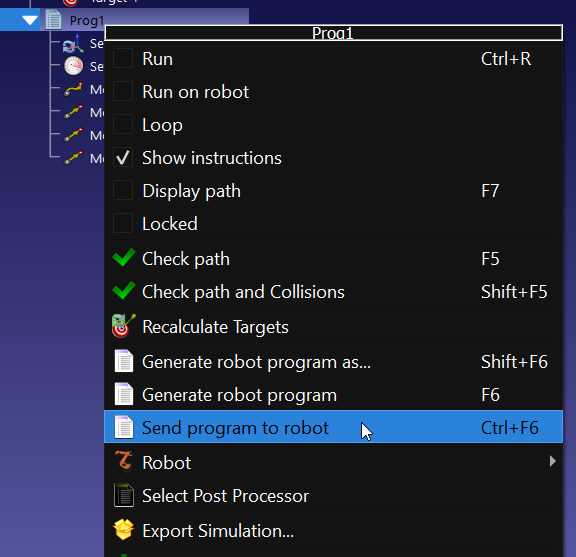
Send Program
最後はRoboDKで作ったプログラムをURSIMに送信します。先程作ったロボットプログラムを右クリックします。
”Send program to robot”をクリックします。
しばらく待ちます…

このプログラムはロボットが実行します。いいですか?
Yesで進みます。
Done!RoboDKで作ったプログラムをURSIM上にも実行しました。
