今回の記事ではFANUC ロボットプログラムを呼び出すときに使うARパラメータの使い方について説明します。ARを使うことによりロボットプログラムはもっとFlexibleになり、ARの現在値によって呼び出すSub-プログラムが変わったりなどできます。
さ、はじめよう!
Implementation1
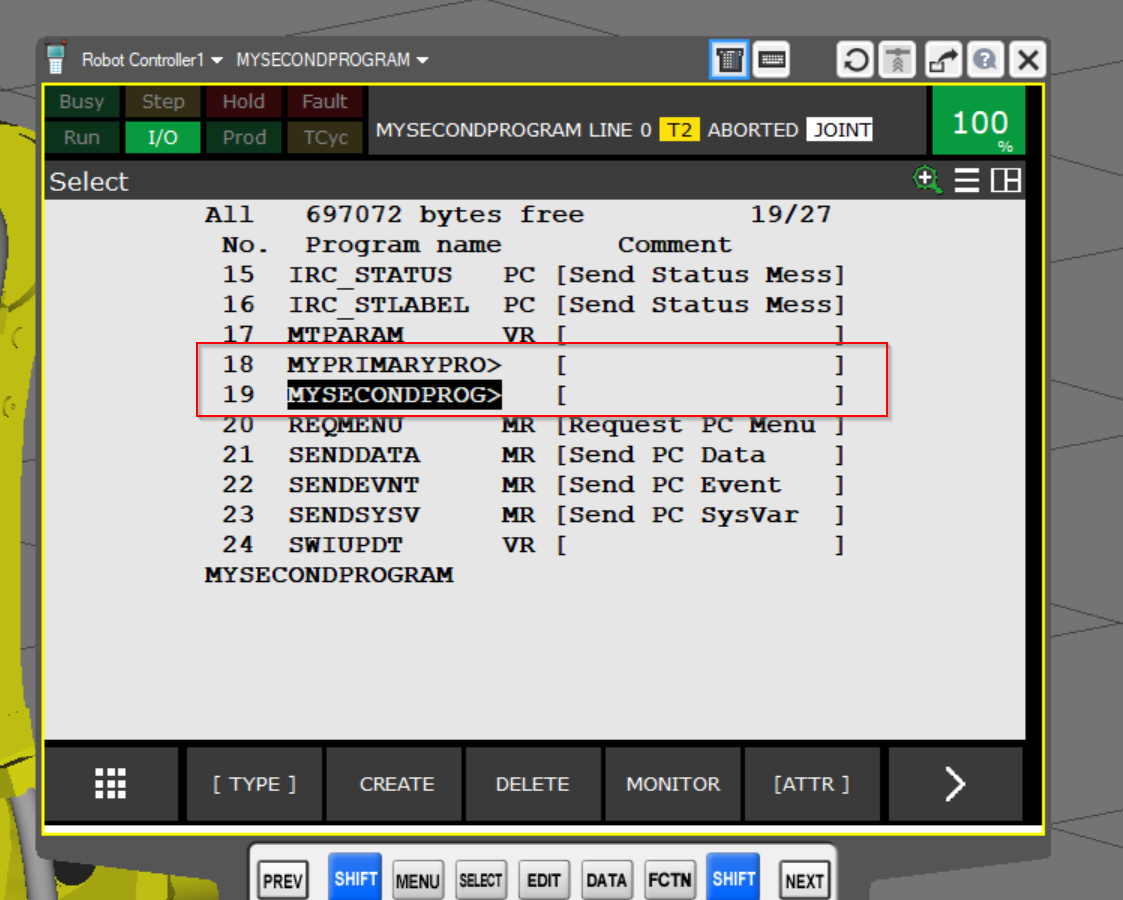
最初に2つのロボットプログラム、MYPRIMARYPROとMYSECONDPROGを作成します。
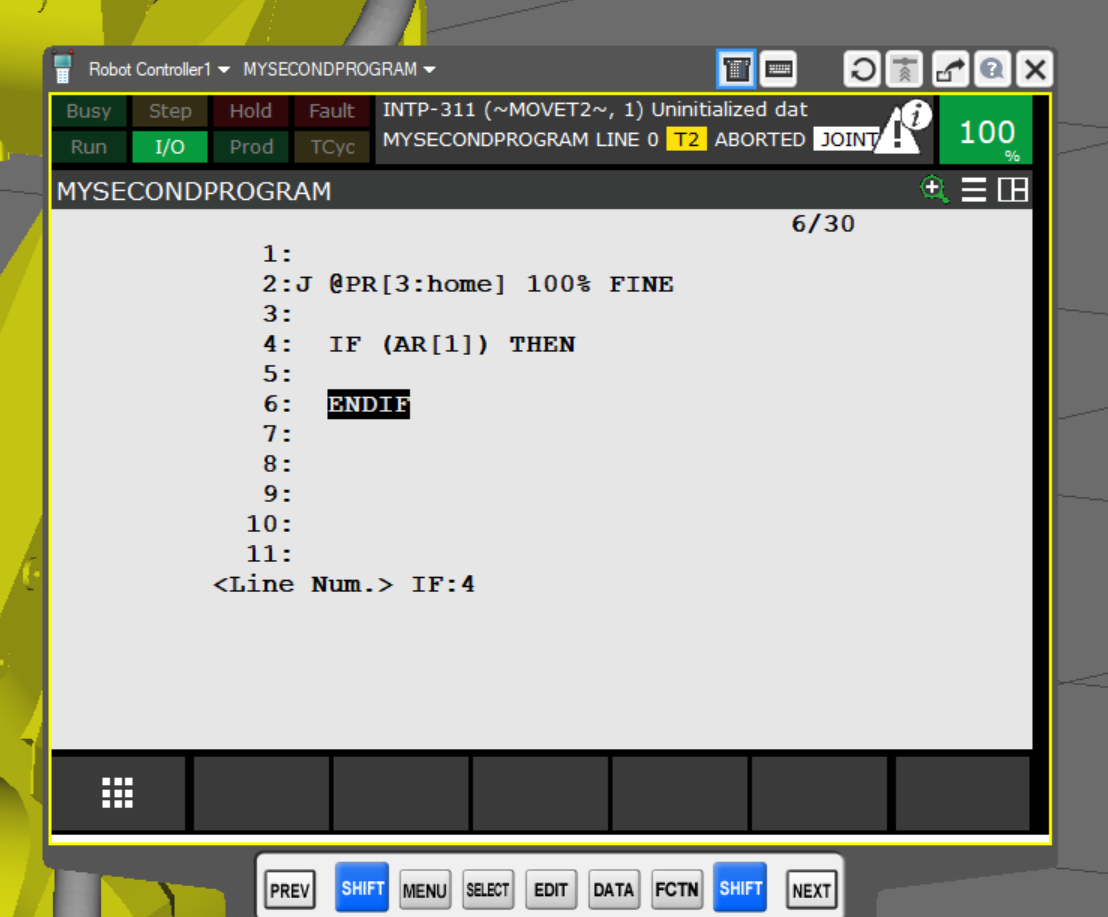
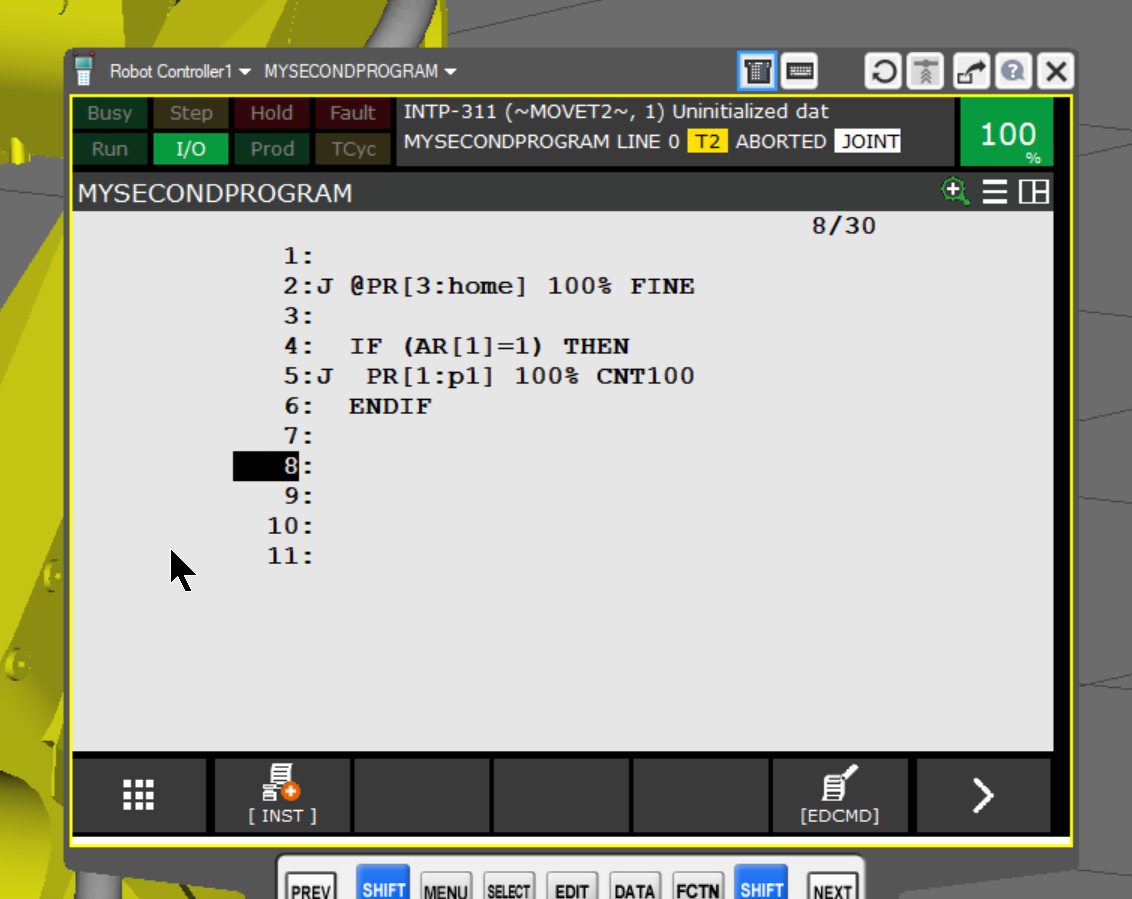
MYSECONDPROGロボットプログラムを開き、IF(..) THENの条件判断Statementを追加します。

次はIF(..) THENの比較条件にAR[ ]を使用します。AR[ ]はARGUMENTSで、今回記事で紹介するものです。

次はAR[…]の比較パラメータ番号を定義します。
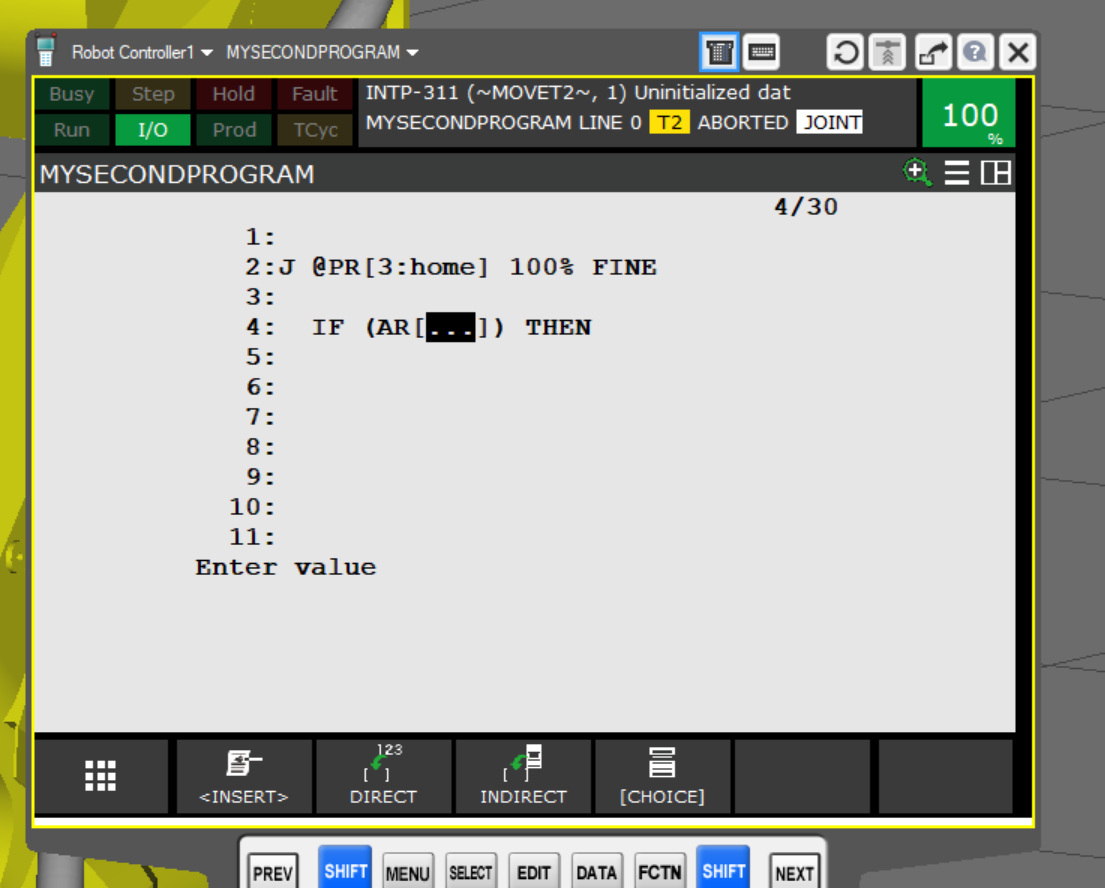
今回はAR[1]と比較します。AR[1]は0個目のARGUMENTSに該当します。
現在のロボットプログラムにはAR[1]を入れました。
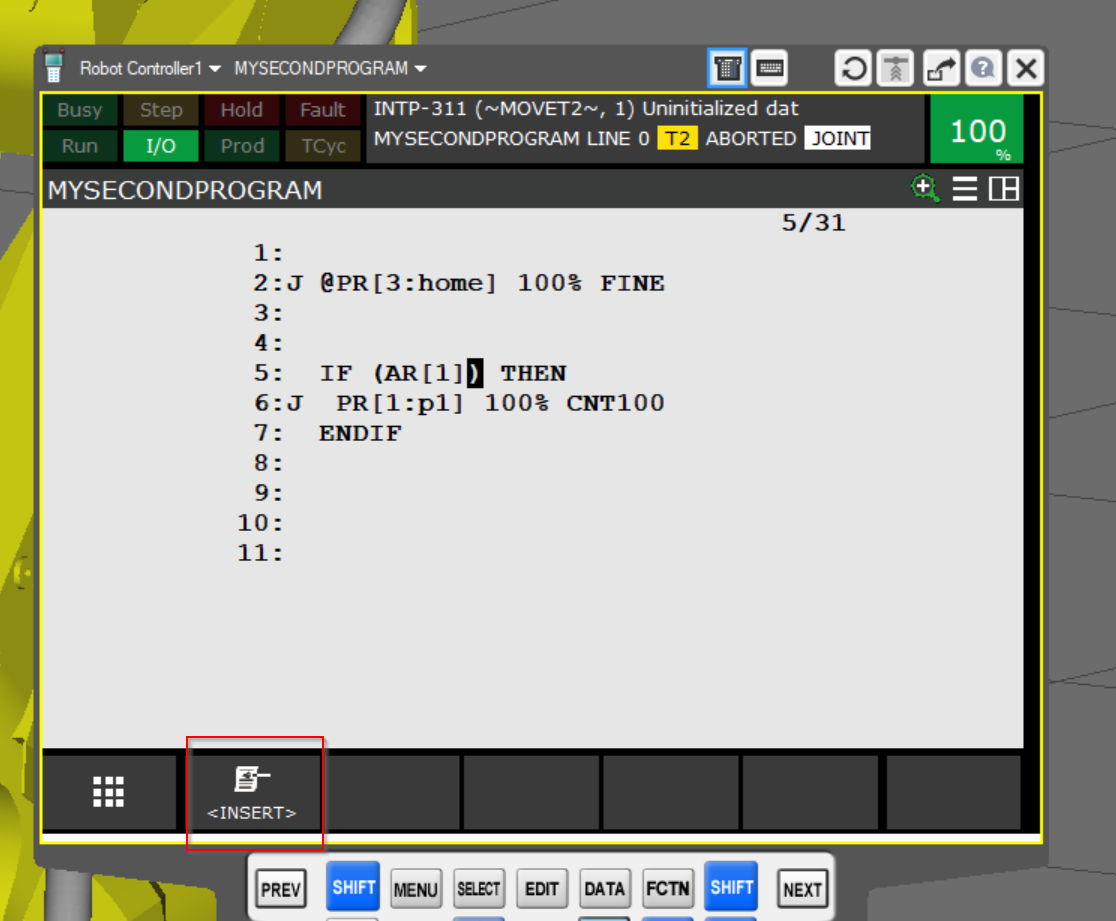
AR[1]の比較値を<INSERT>クリックで追加します。
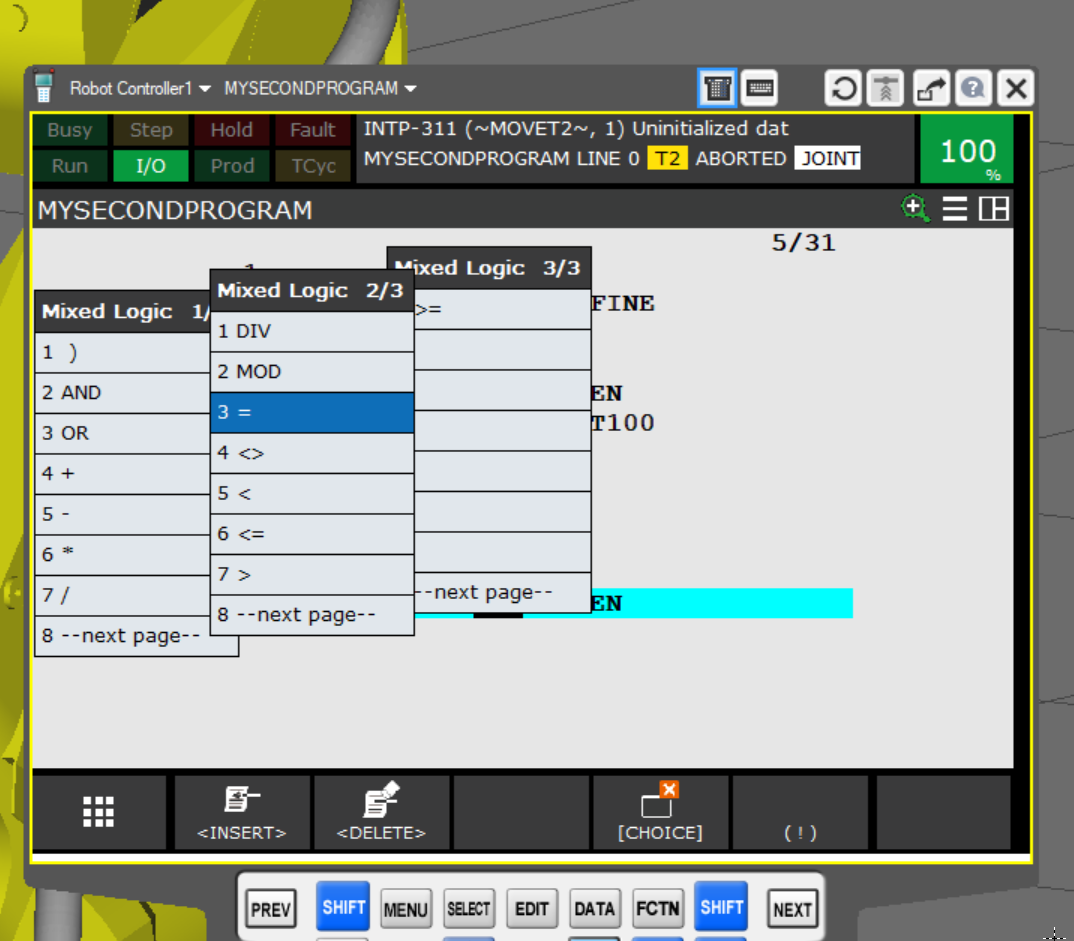
= Statementを追加します。AR[1]= はAR[1]がある値に相当するとTrueになることを示しています。
次はConstantを追加します。つまりAR[1]は定数と比較します。
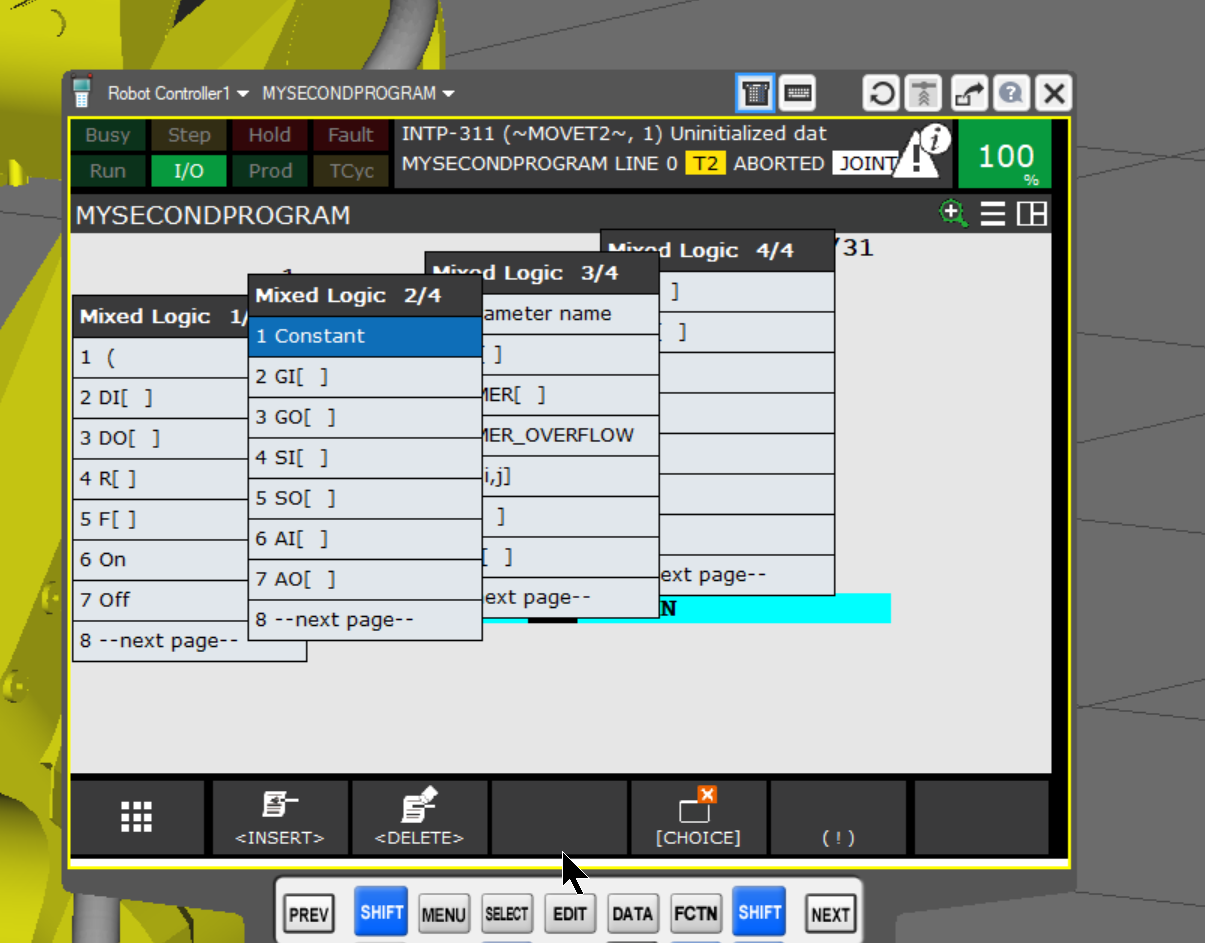
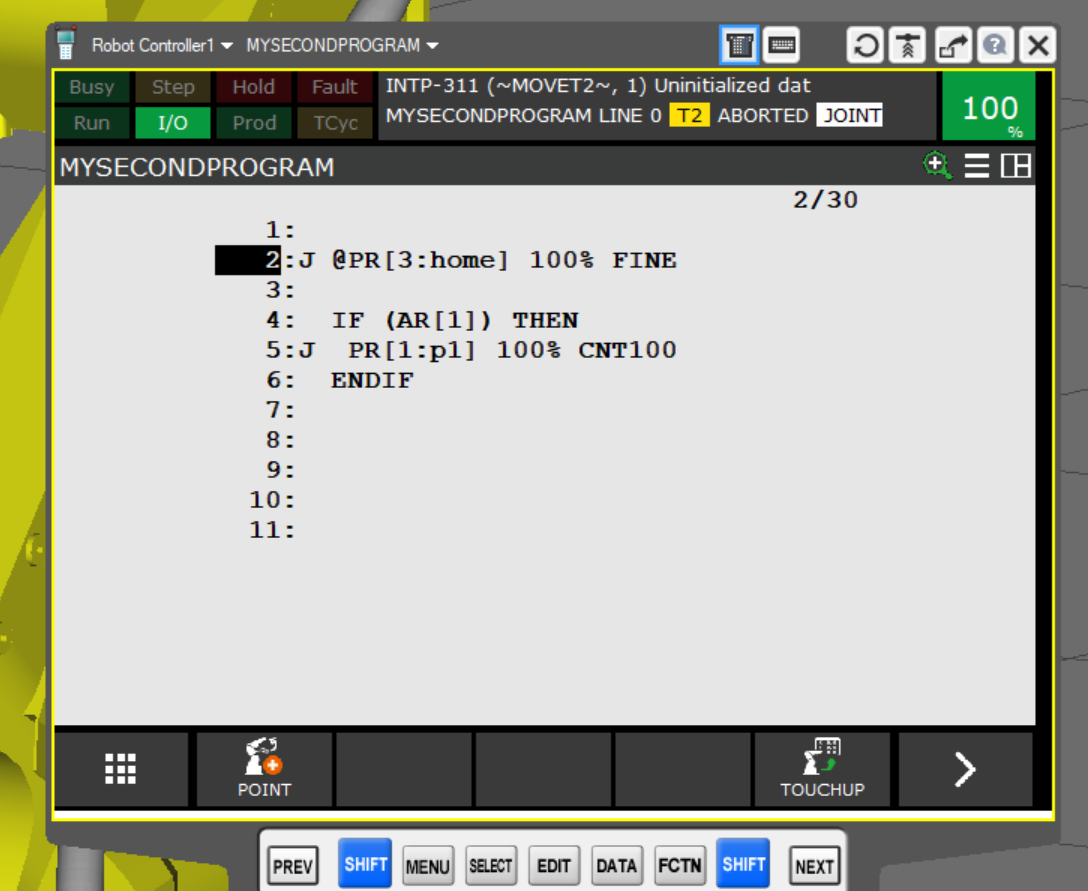
Done!いまのロボットプログラムはAR[1]が1であれば、ロボットがp1に移動します。
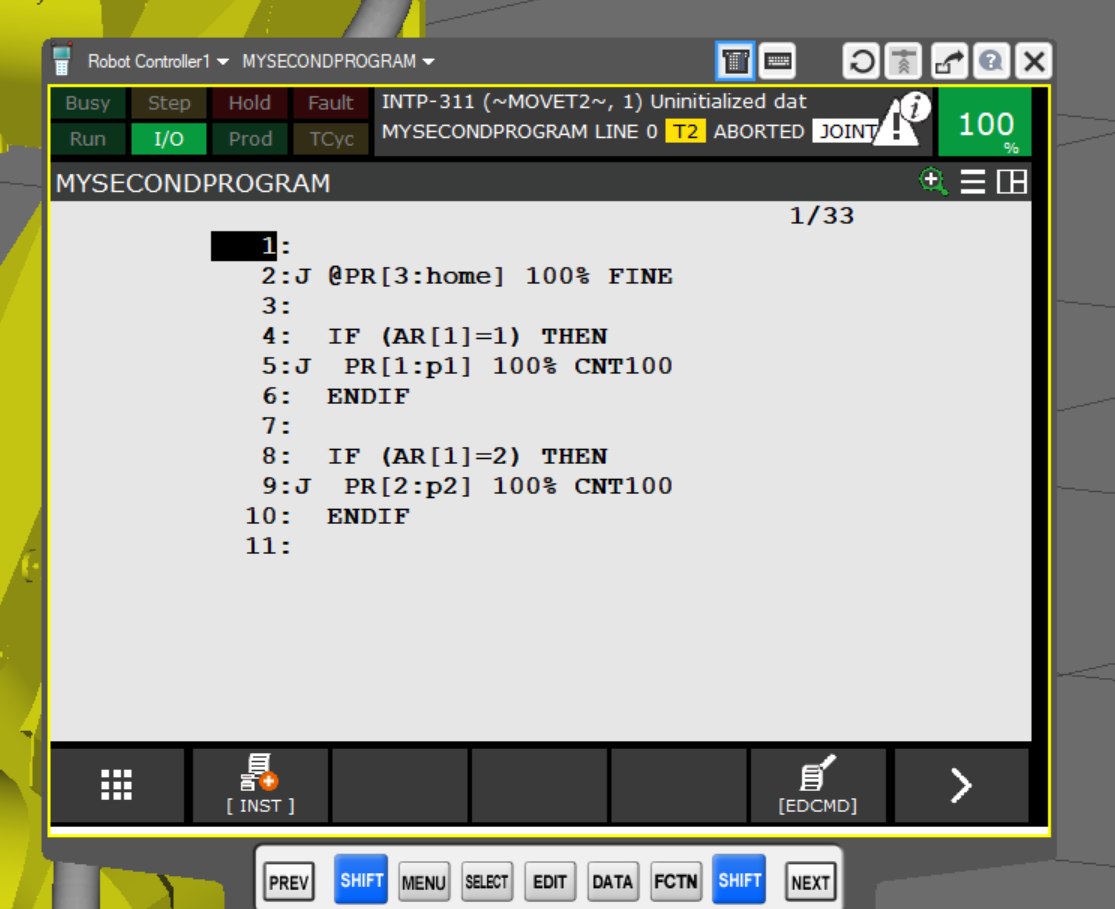
同じロジックを追加し、ロボットプログラムがAR[1]が2であれば、ロボットがp2に移動します。
今度はMYPRIMARYPROロボットを開きます。

CALL関数を使用し、ロボットプログラムを呼び出します。

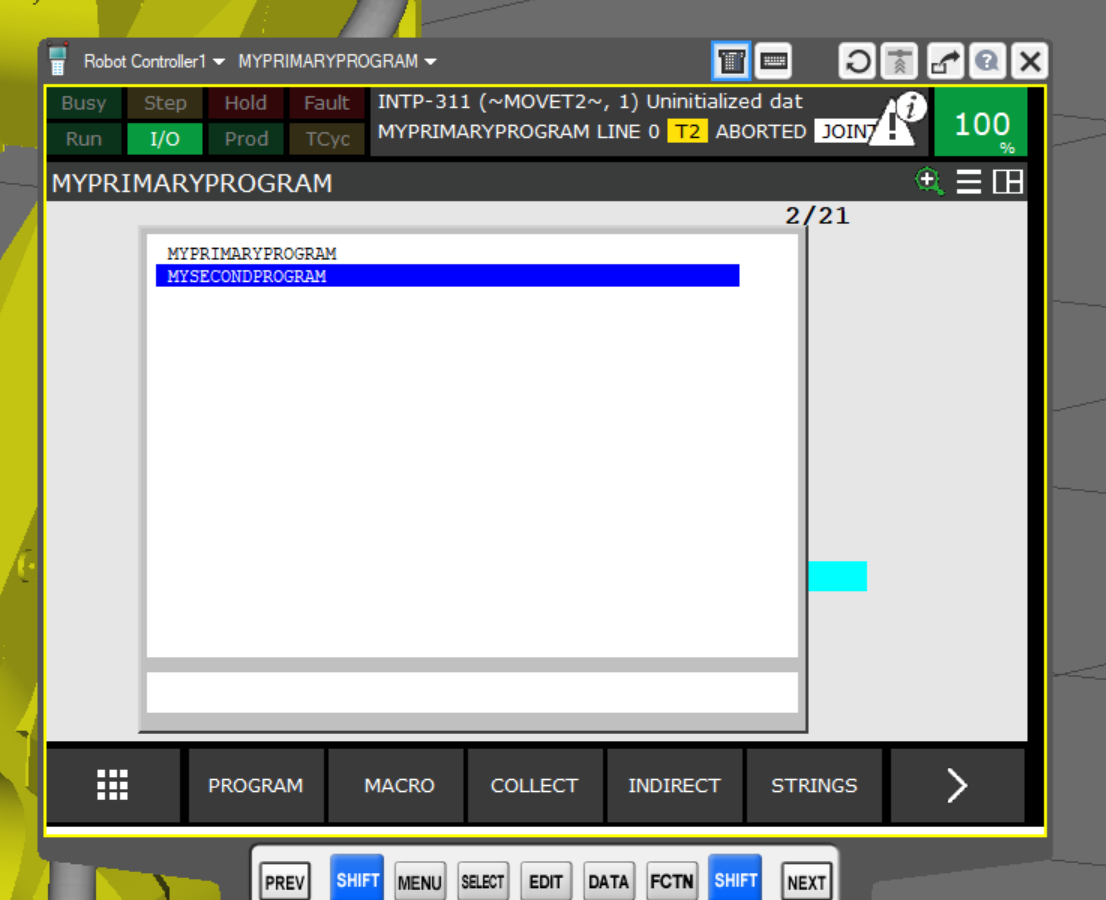
CALL program statementを追加します。
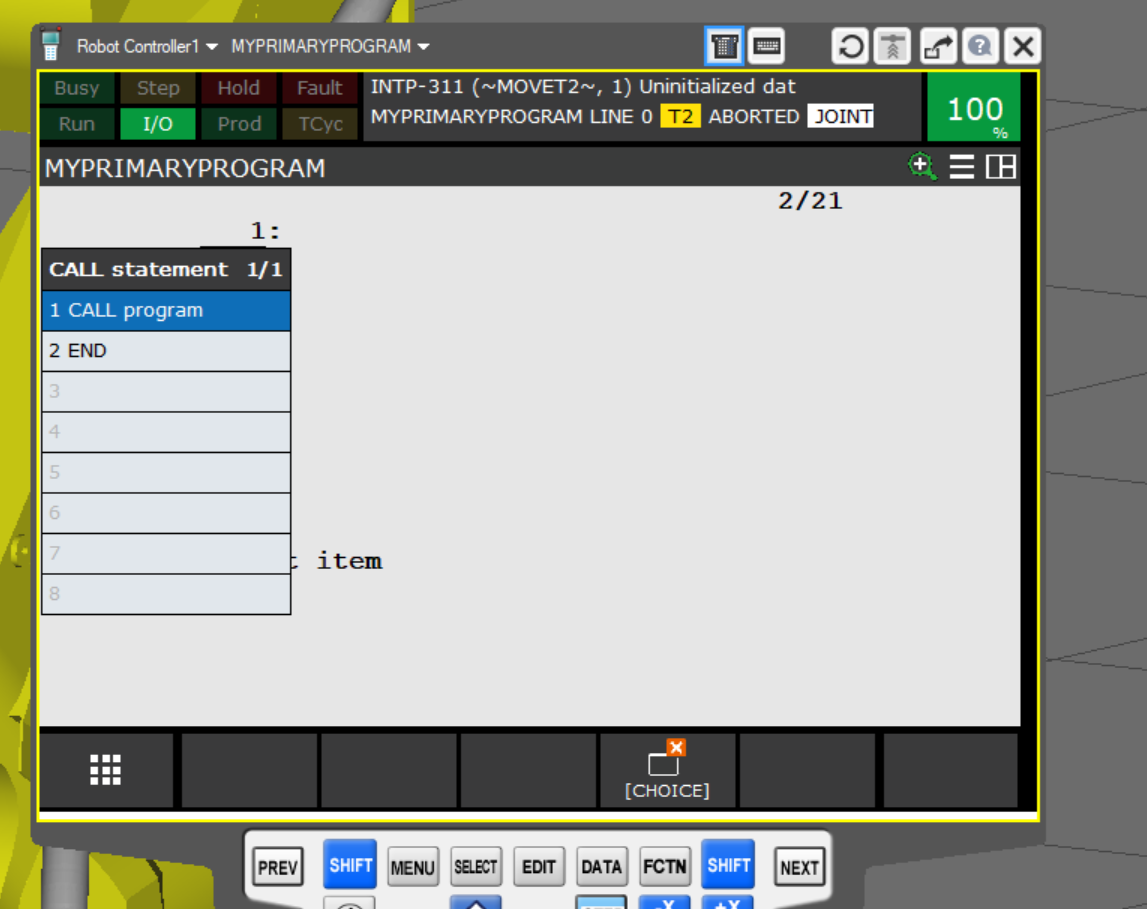
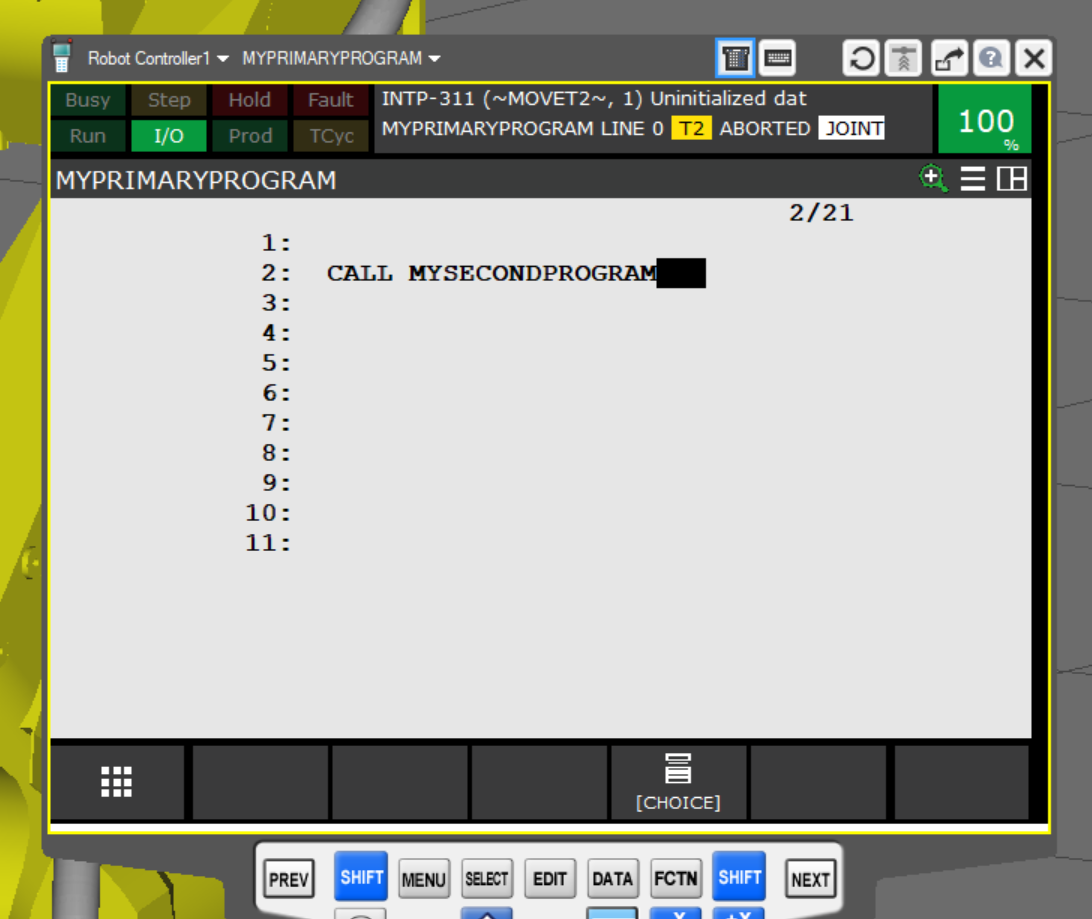
先程ロジックを作成したMYSECONDPROGを選びます。
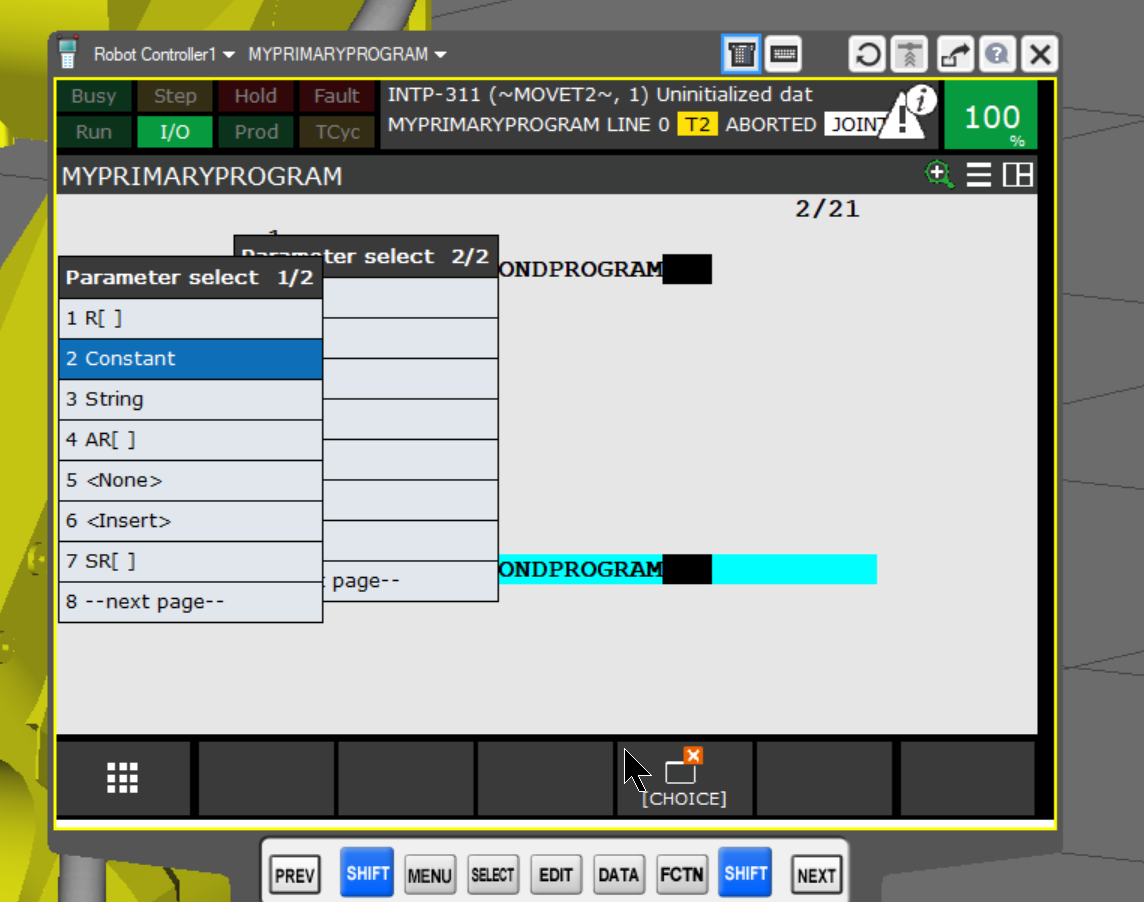
Done!次にMYSECONDPROGを呼び出したとき、ARGUMENTも一緒にロボットプログラムに渡すために、CHOICEボタンをクリックします。
Constantを使用します。
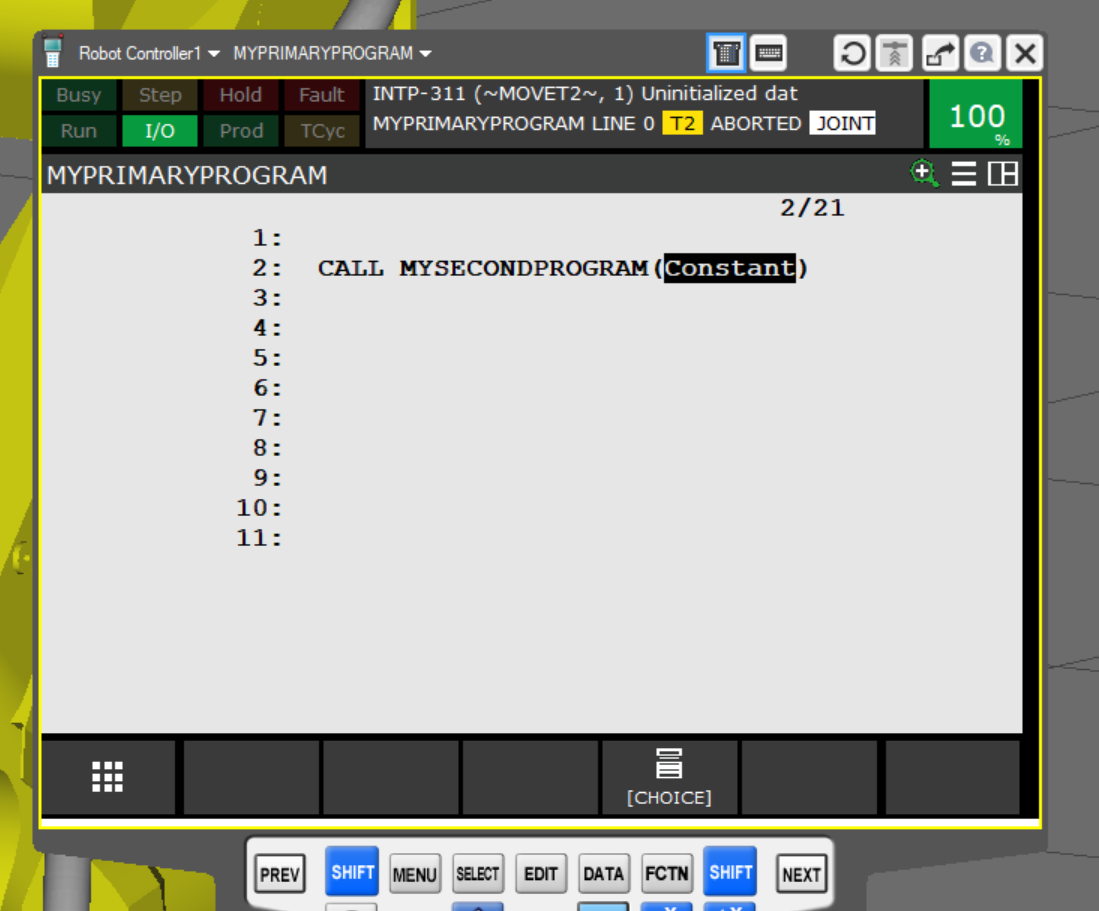
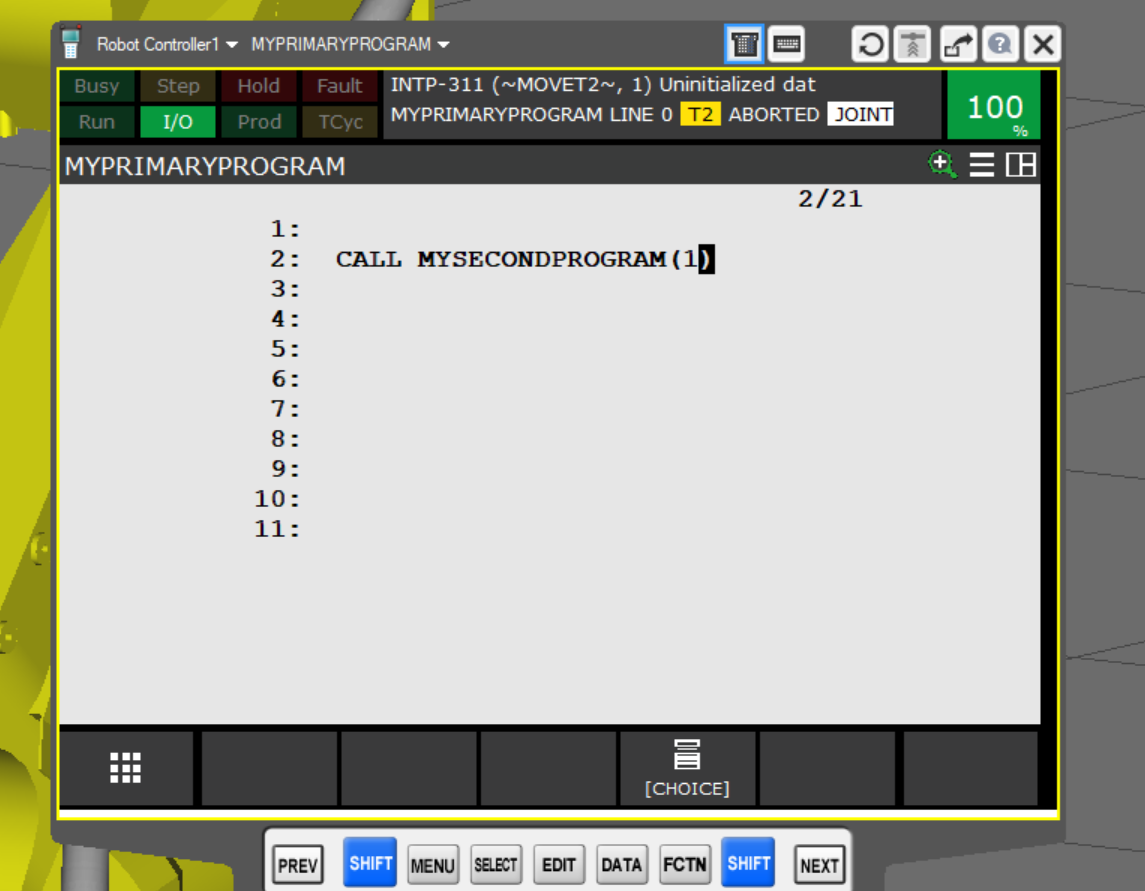
いまはMYSECONDPROG(Constant)になりました。
Constantを”1”に変更します。つまりMYSECONDPROGを呼び出すとき、AR[1]=1になります。
下図のようにロボットプログラムが実行されると、ロボットがp1に移動する命令が実行されます。
今度はConstantを”2”に変更します。つまりMYSECONDPROGを呼び出すとき、AR[1]=2になります。

下図のようにロボットプログラムが実行されると、ロボットがp2に移動する命令が実行されます。
Implementation2
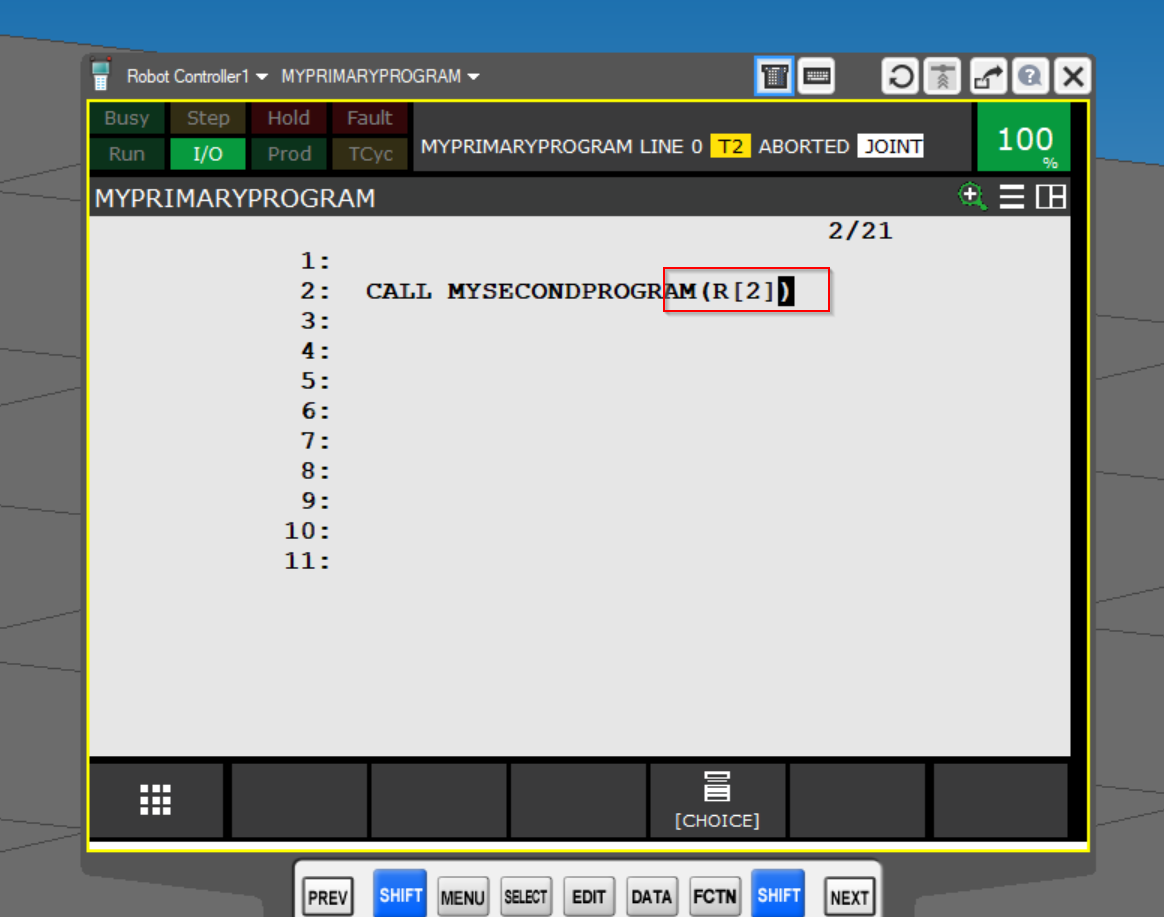
実際ARをロボットプログラムに渡すとき定数だけではなくR[ ]を使用することもできます。

今回はR[2]を使用します。
画面を2つにわけ、右側にDATA Registerを表示や変更できるようにします
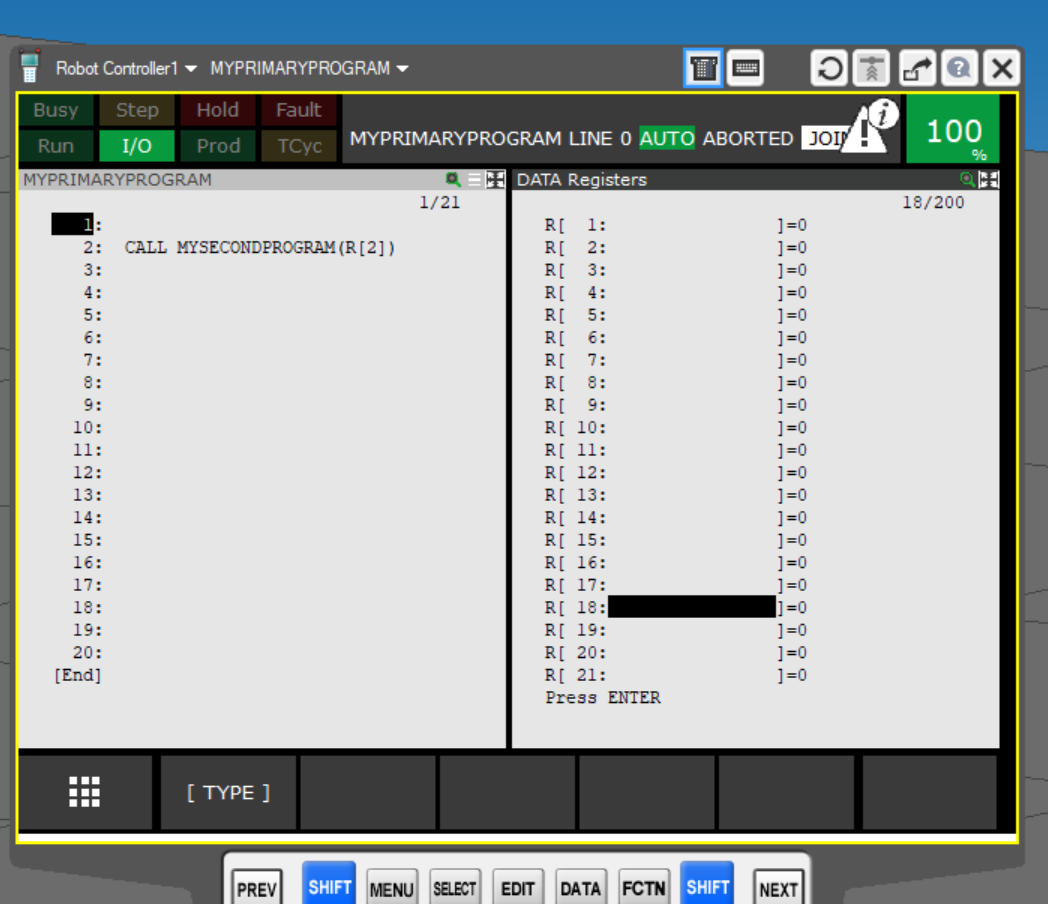
Done!いまロボットはR[2]の現在値によって移動するPositionが変わりました。