今日の記事ではFANUC ROBOGUIDEで2つのロボットで簡単なPick and Placeプロジェクトの作成方法を、1から説明します。
さ、FAを楽しもう。
Reference Link
http://soup01.com/ja/category/%e3%83%ad%e3%83%9c%e3%83%83%e3%83%88/fanuc/
Implementation1
どんなことも小さなステップから始めます。最初はロボット1台だけのPick and Placeから作ります。
Project
RoboGuideから新規プロジェクトを作成します。
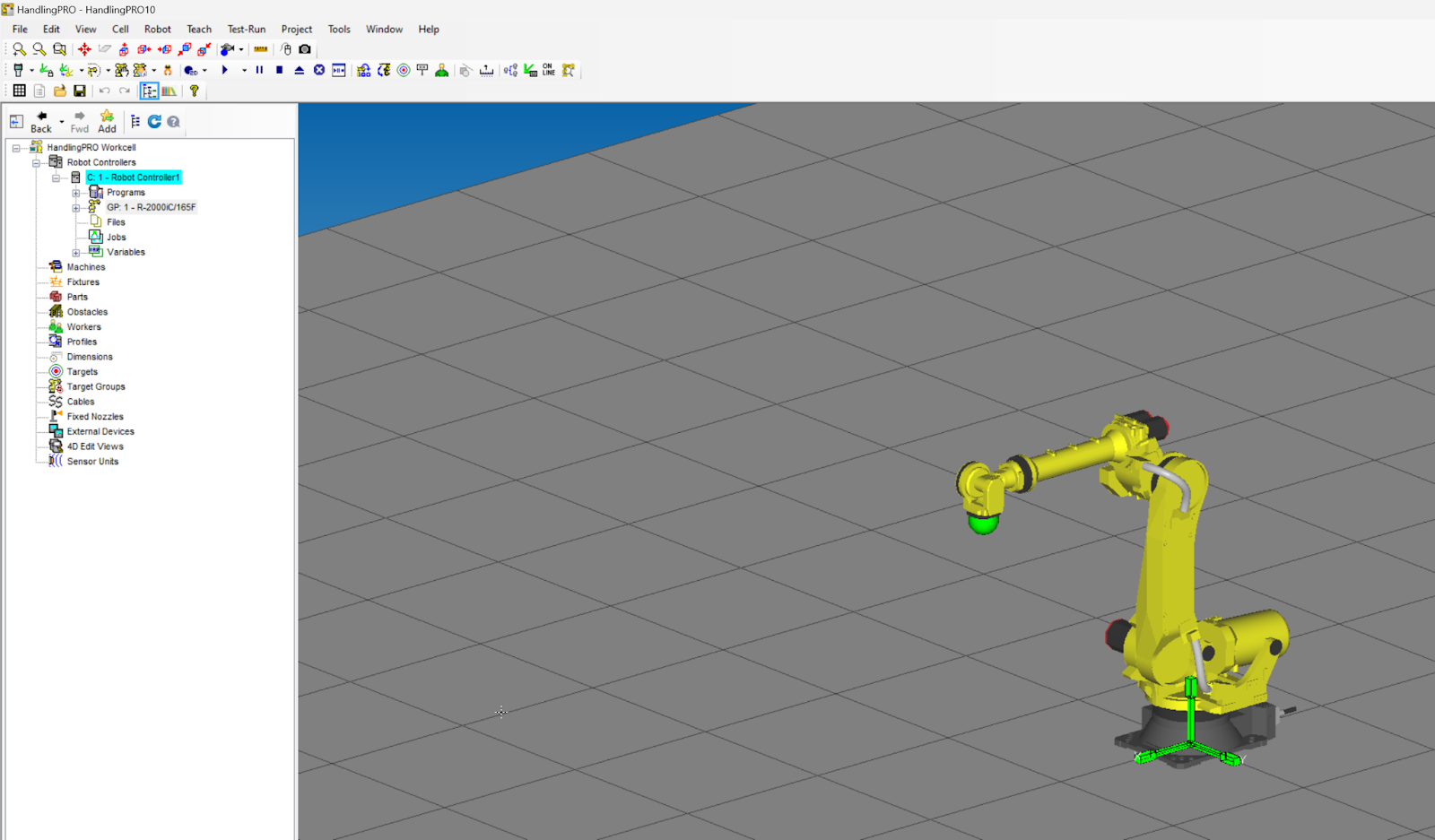
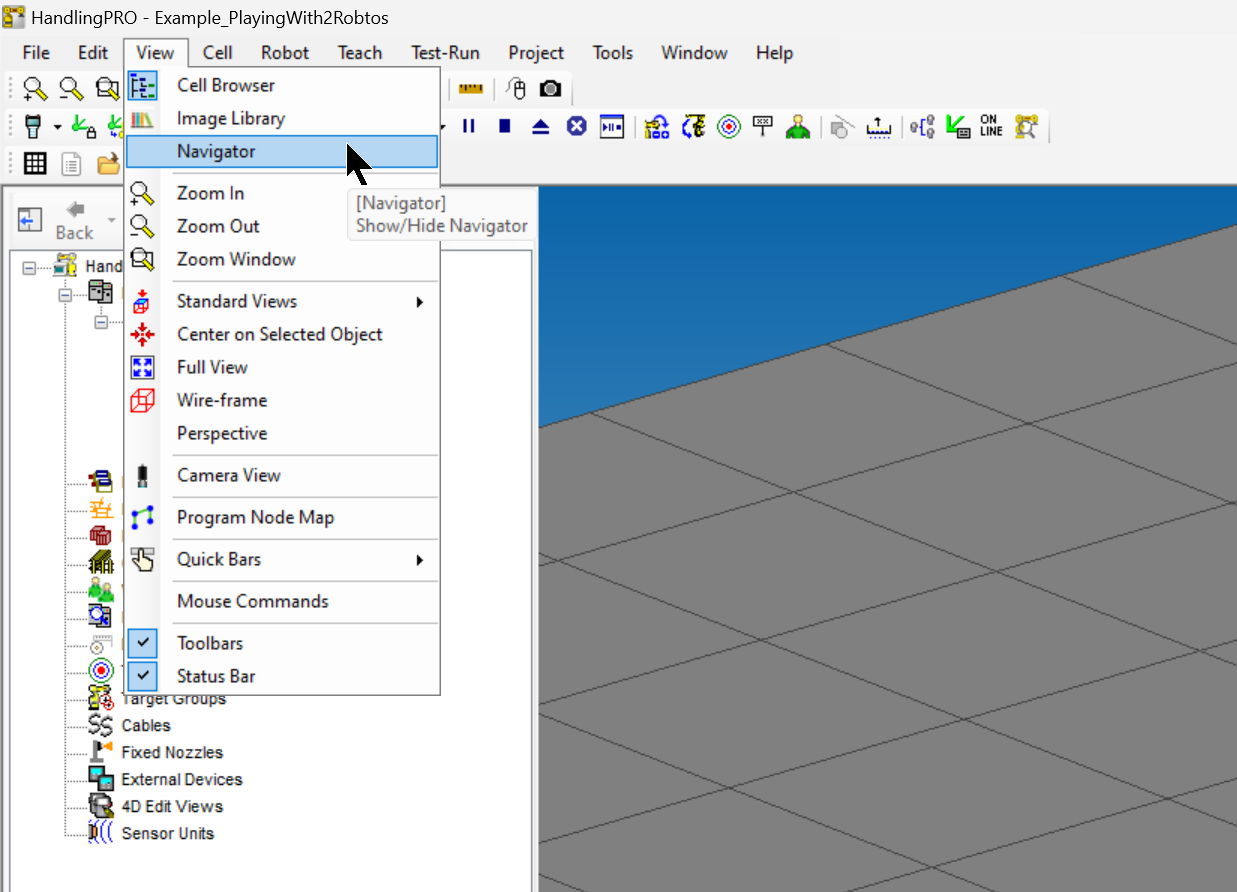
View>Navigatorでプロジェクト Navigatorを起動します。
Done!
Add Part
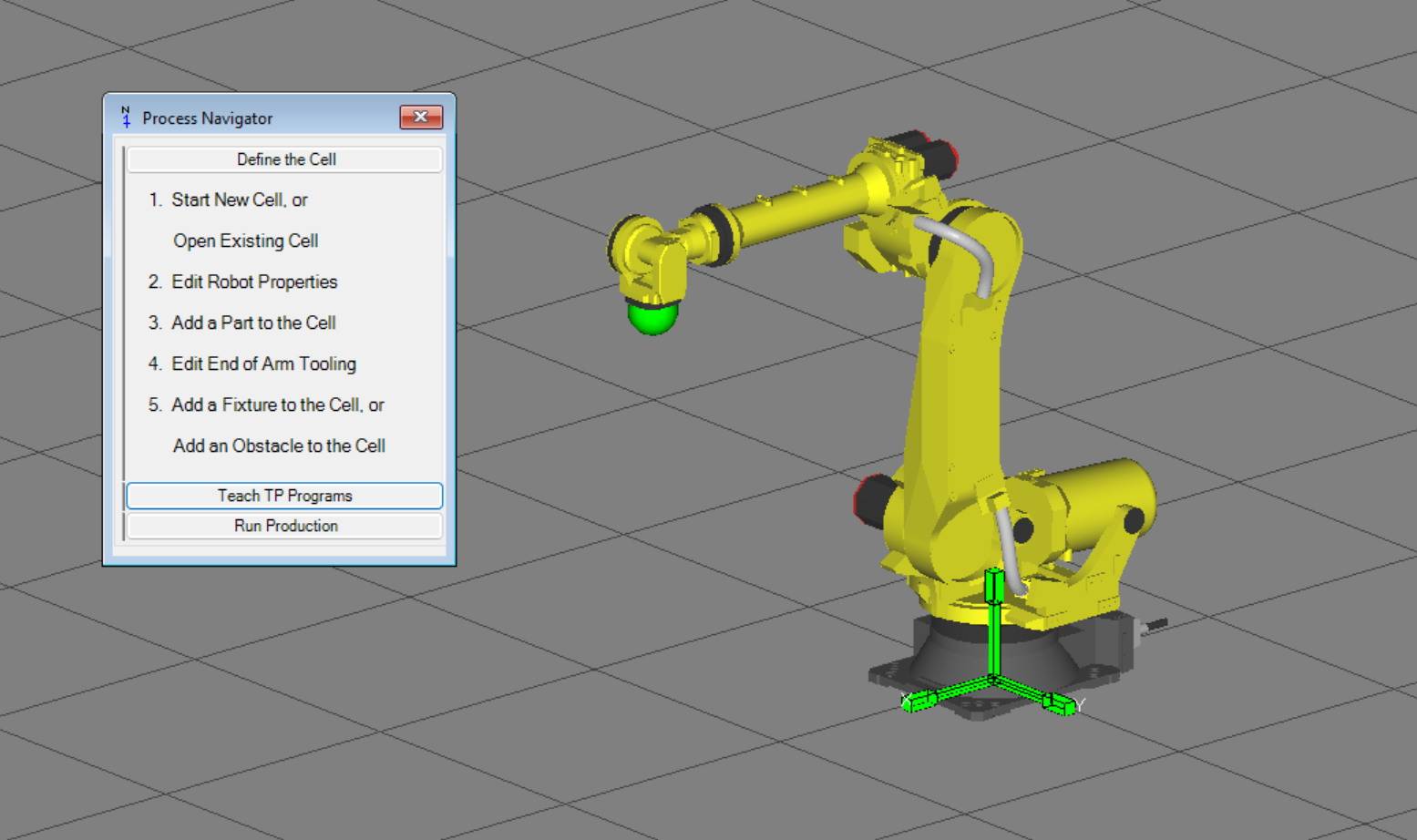
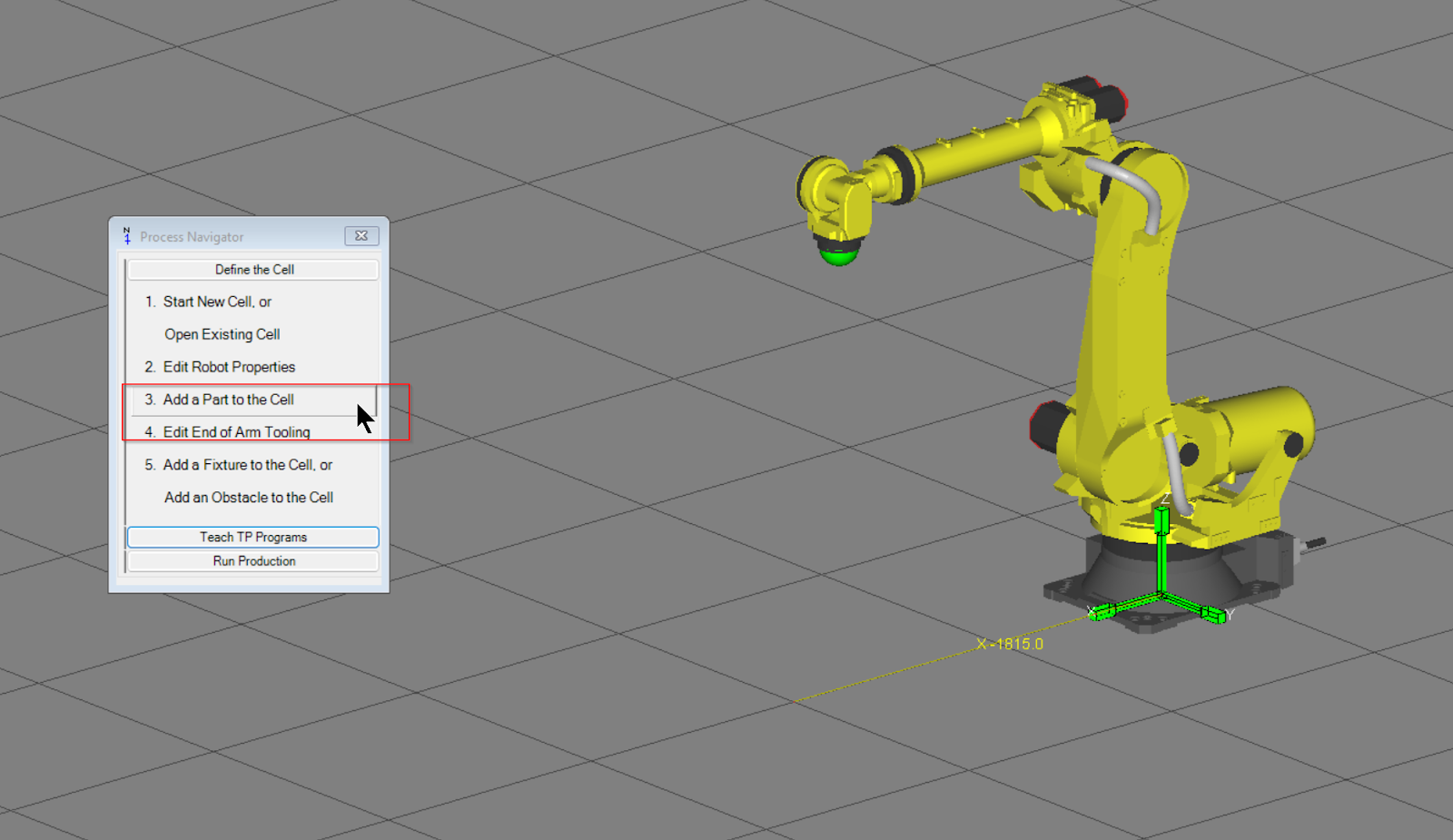
ロボットをPickするPartsを作成するため、Add a Part to the Cellをクリックします。
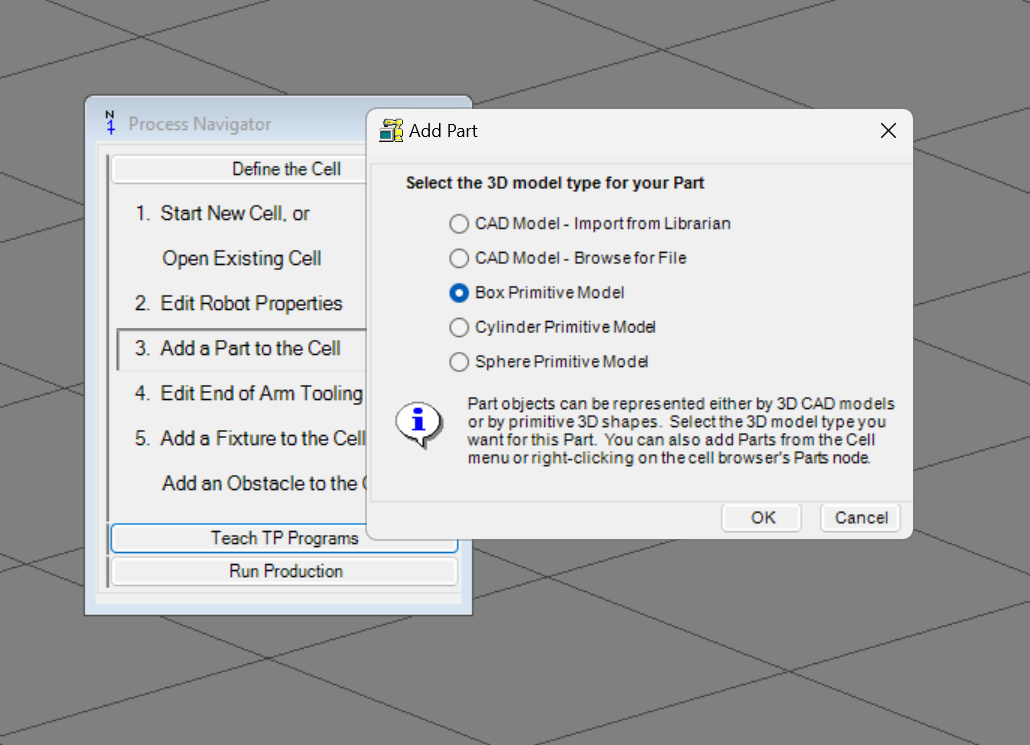
Box Primitive Modelを選択し、OKで進みましょう。
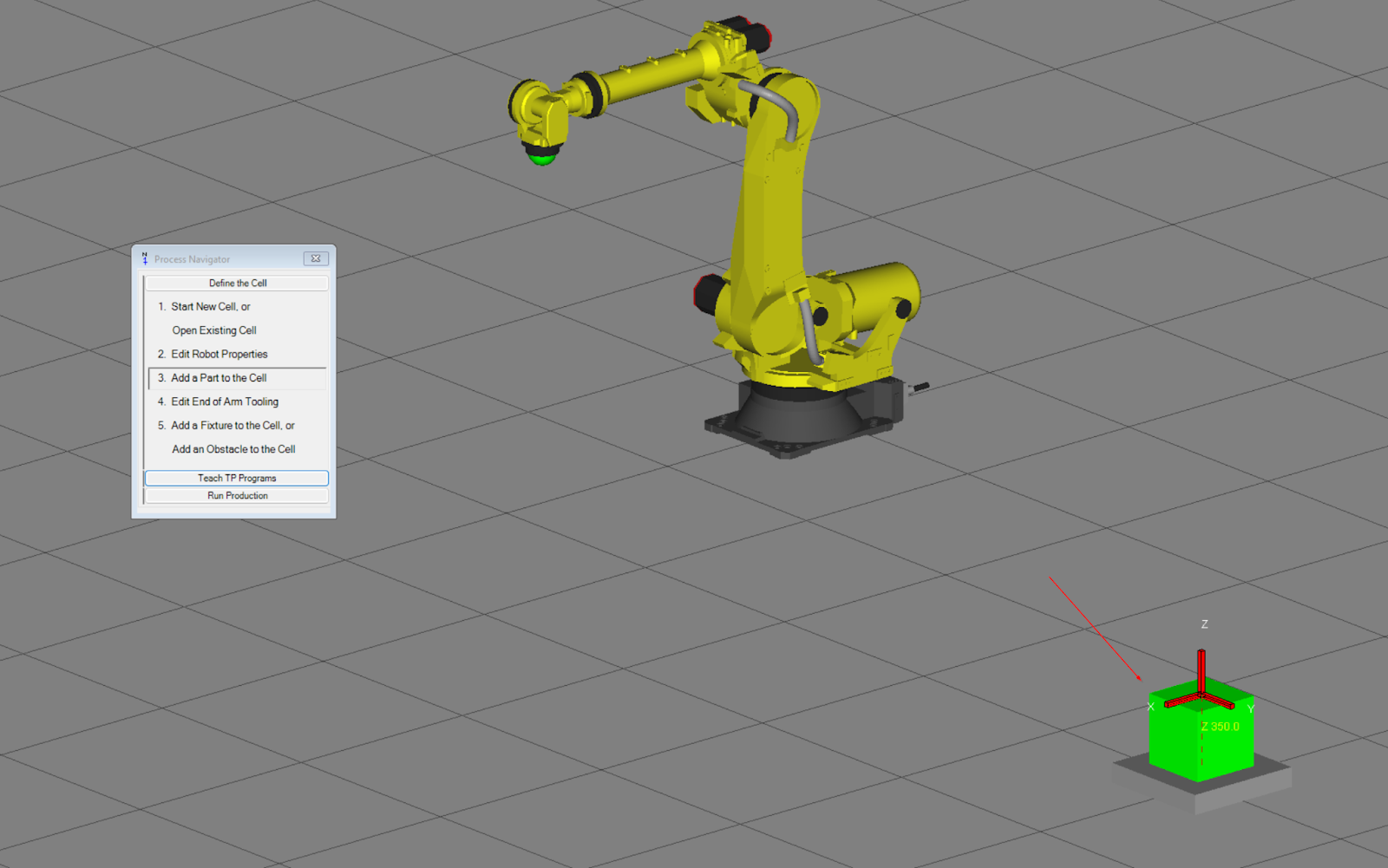
Done!シンプルなボックスが作られました。
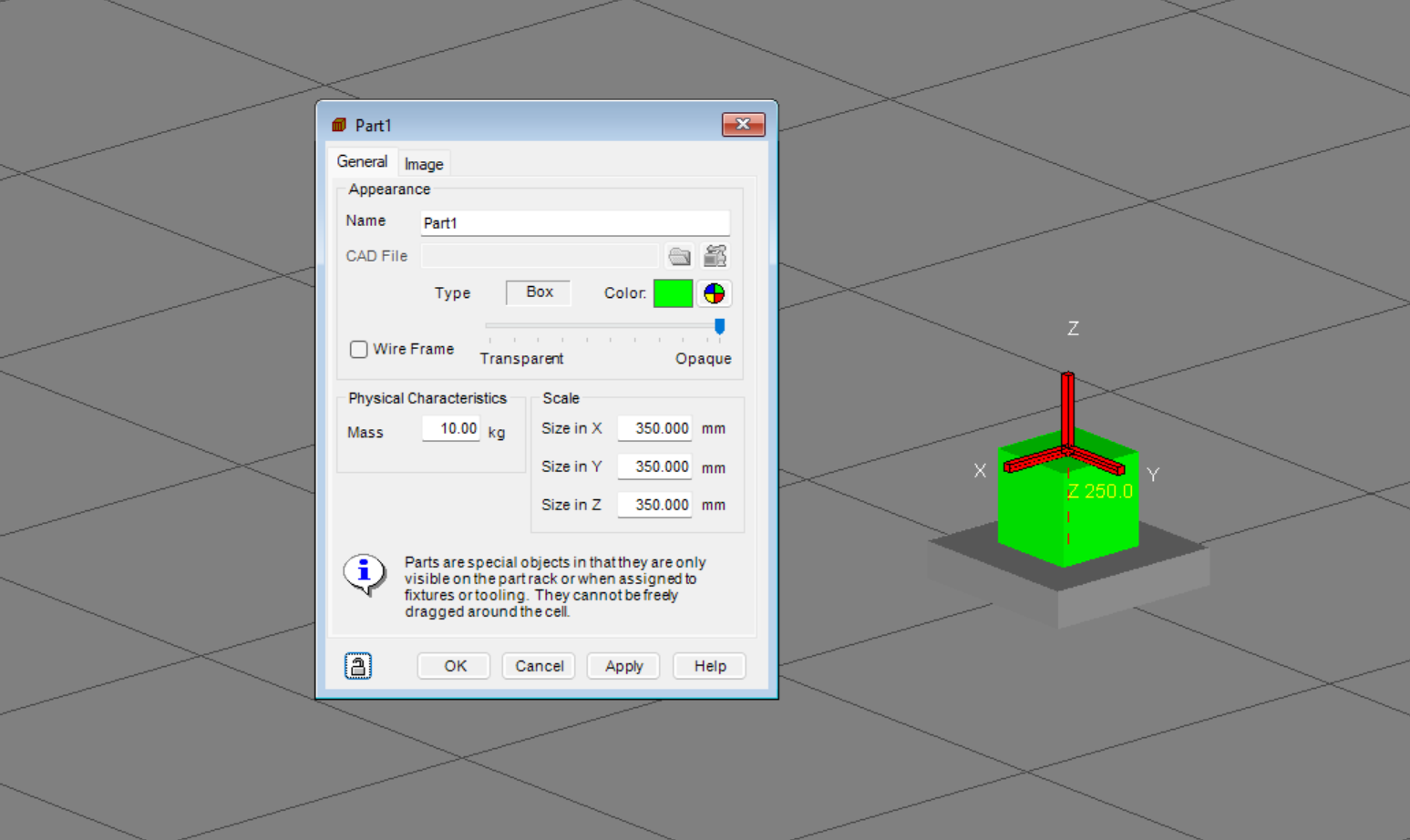
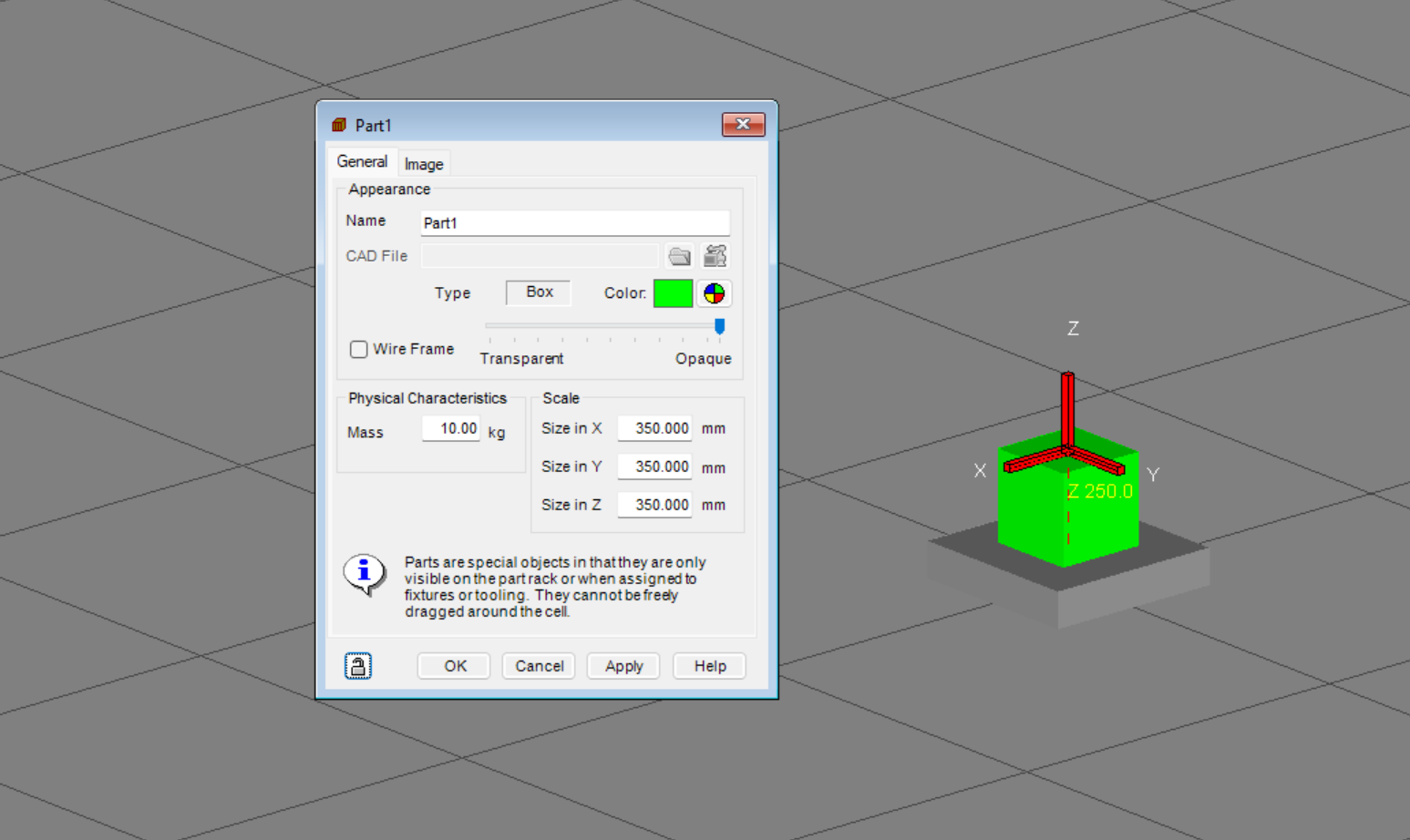
ボックスの大きさなどのプロパティーを変更します。
ボックスの大きさを調整します。
Add Tools
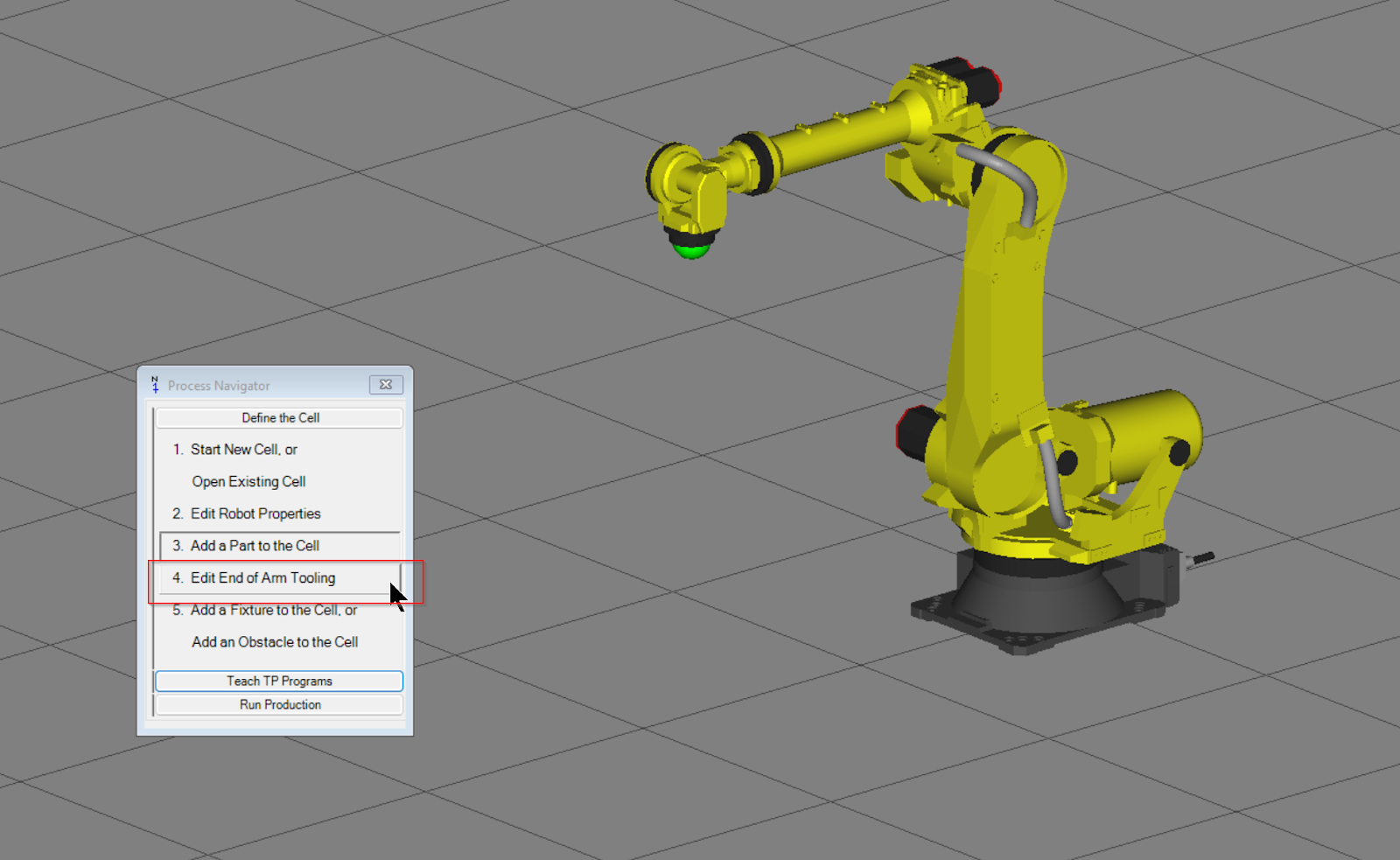
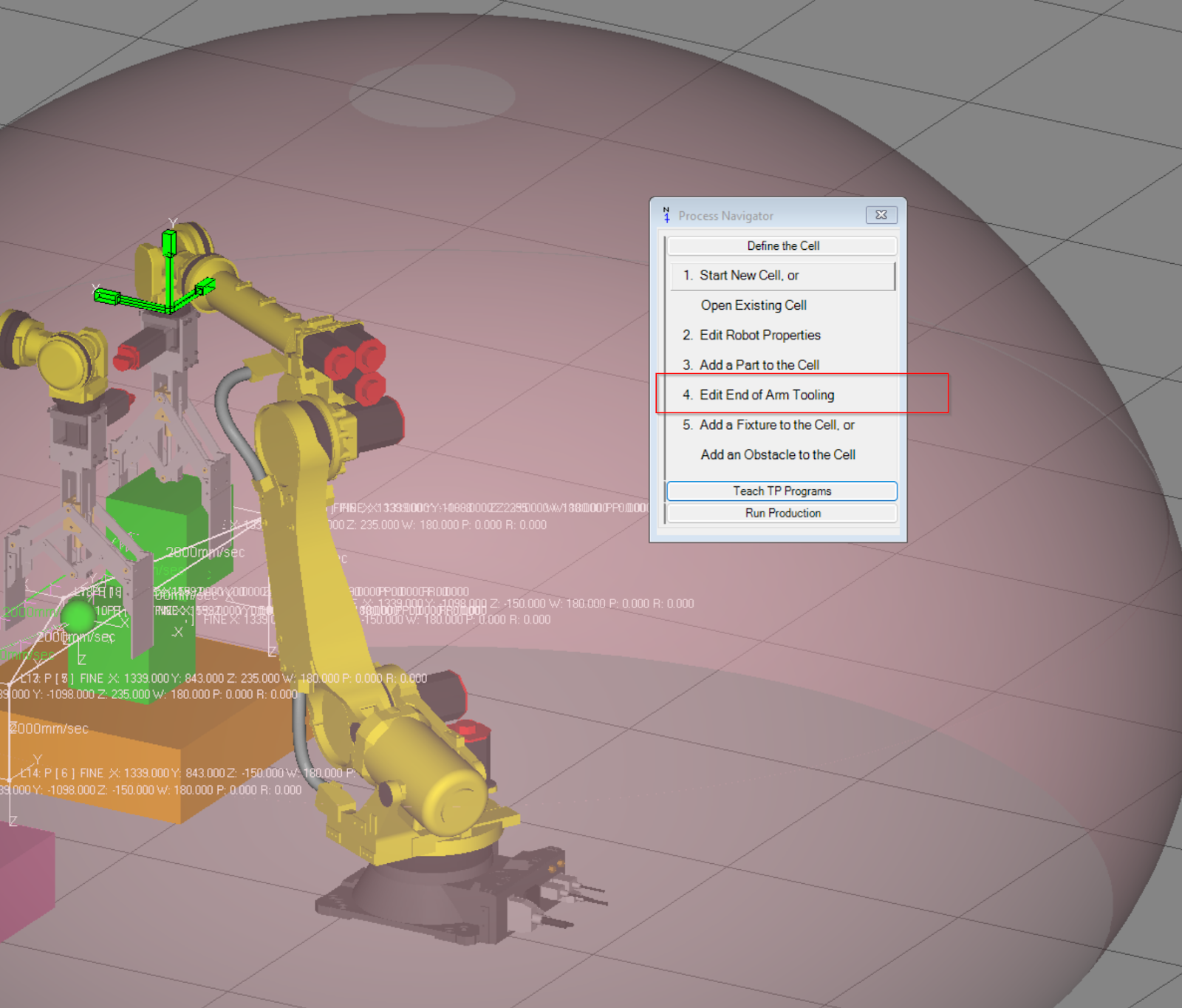
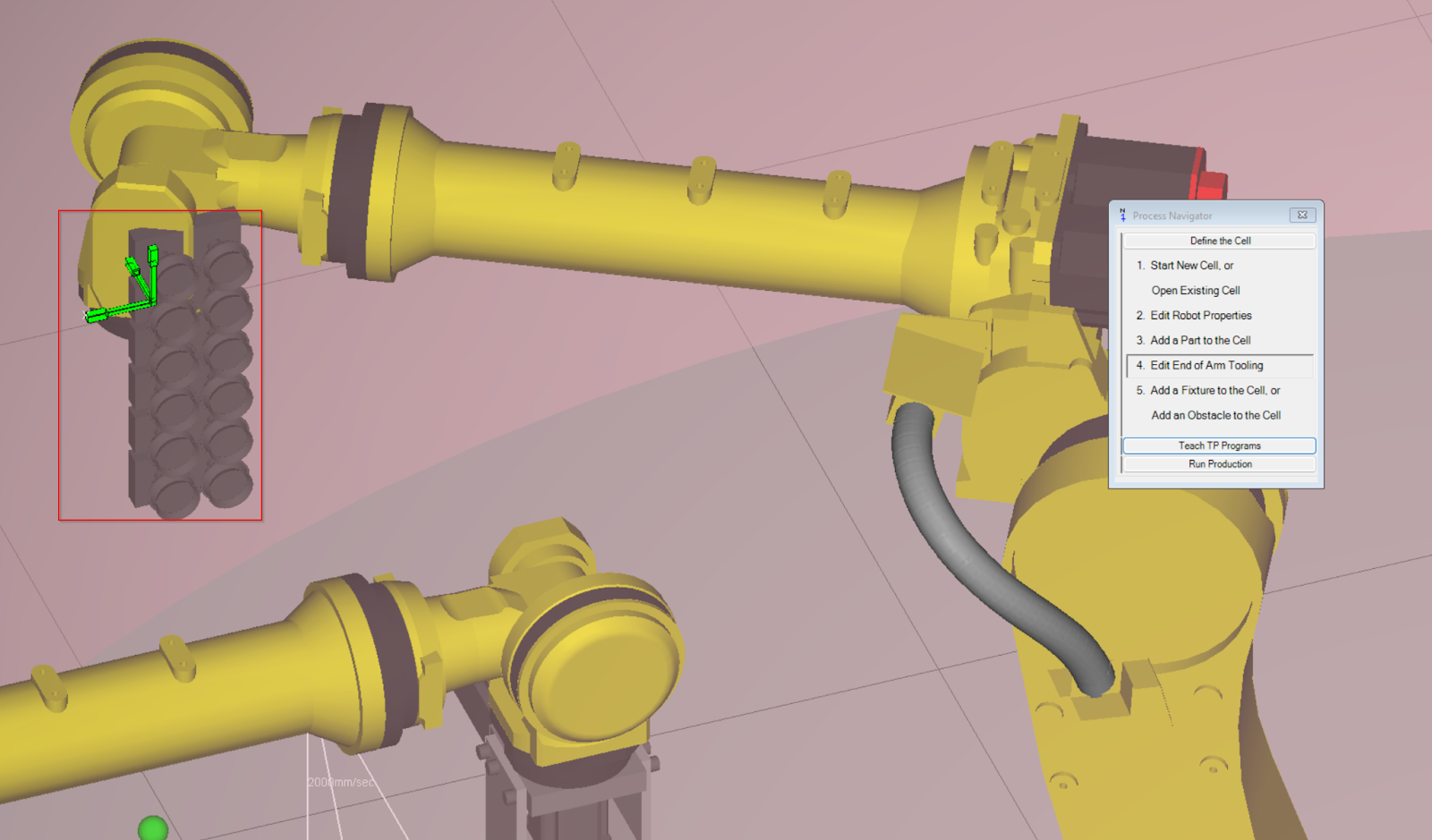
次はロボットにツールを追加するため、Edit End of Arm Toolingをクリックします。
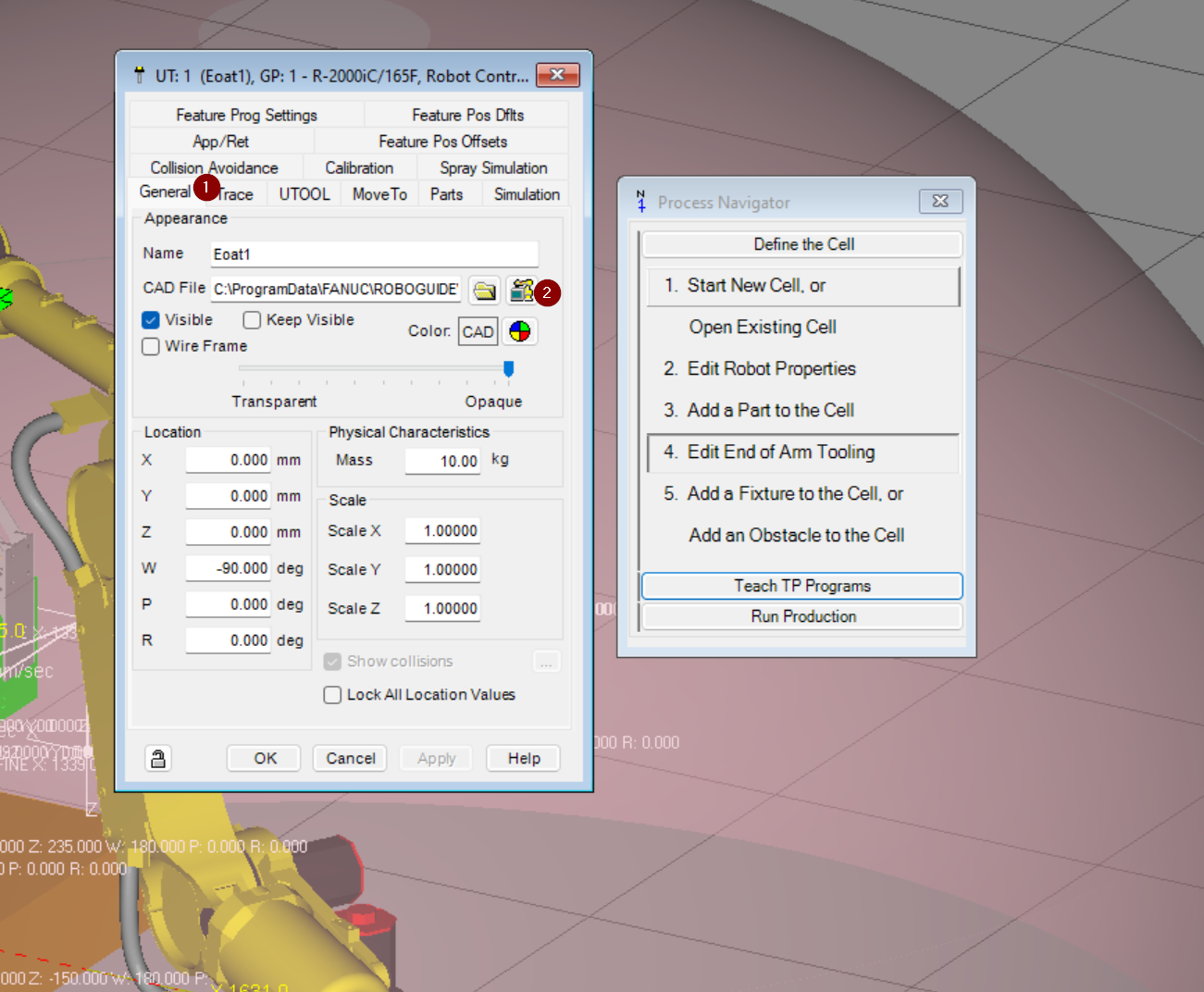
赤枠のボタンをクリックし、ロボット前端にインストールするツールを追加します。
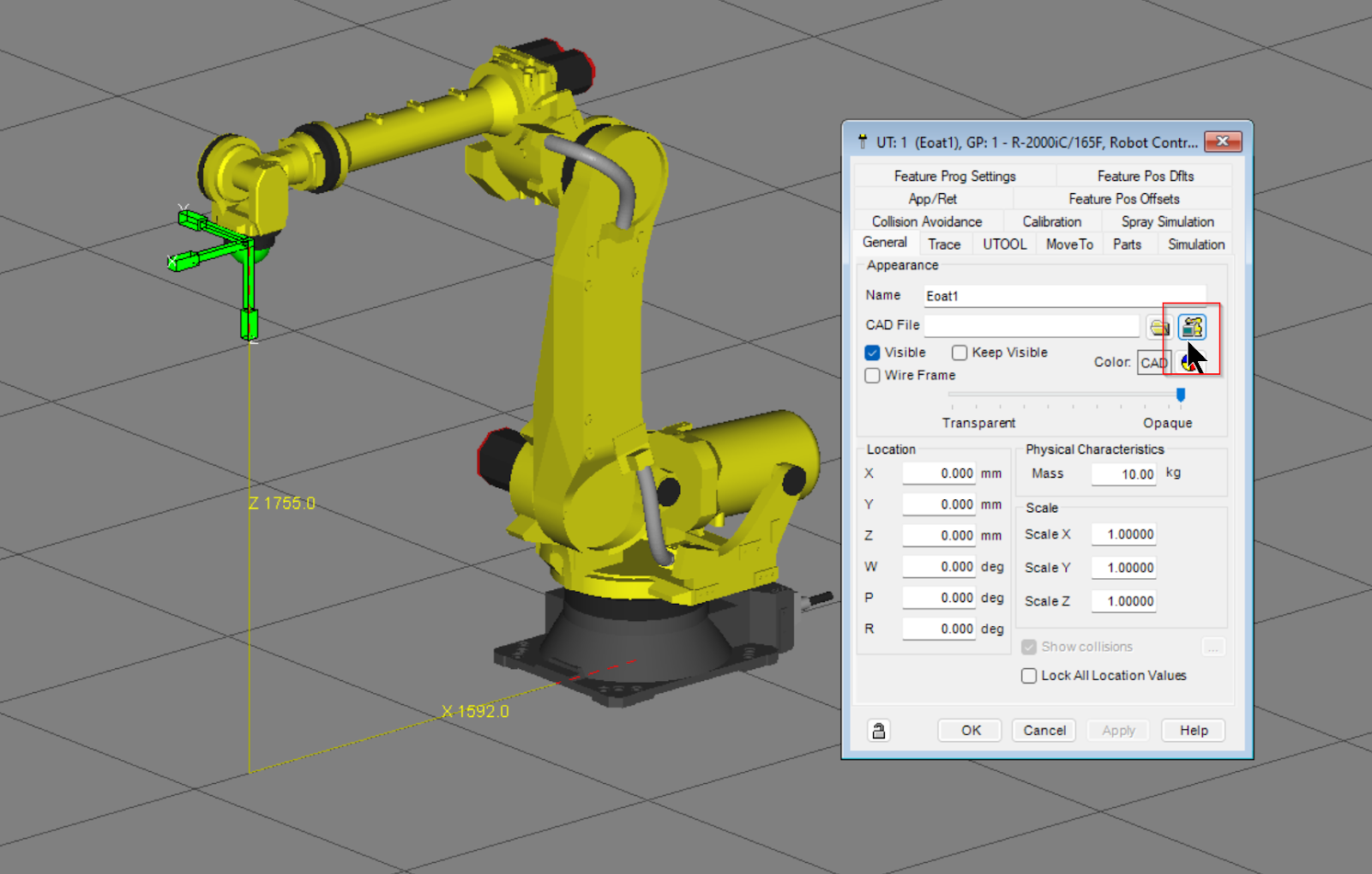
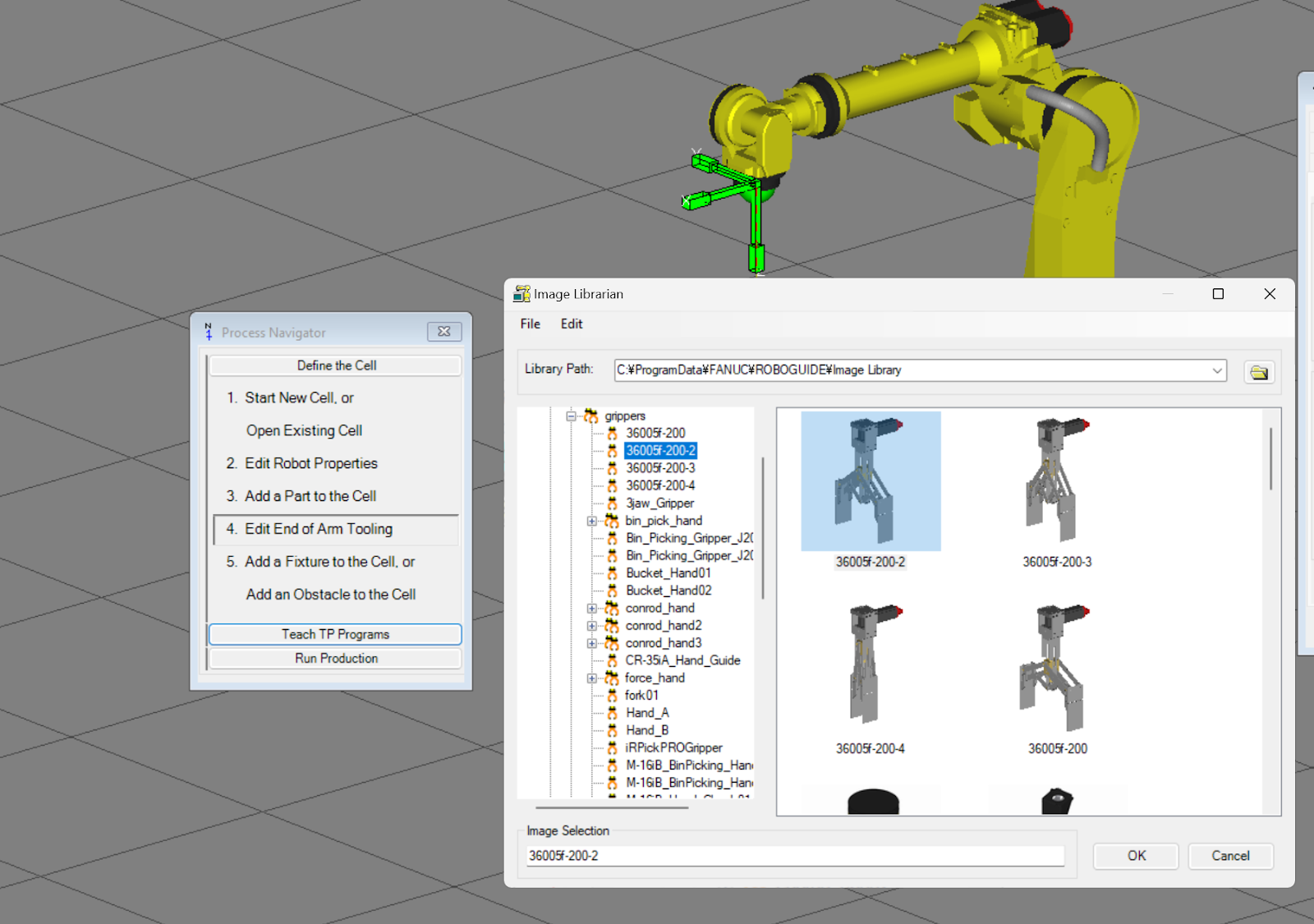
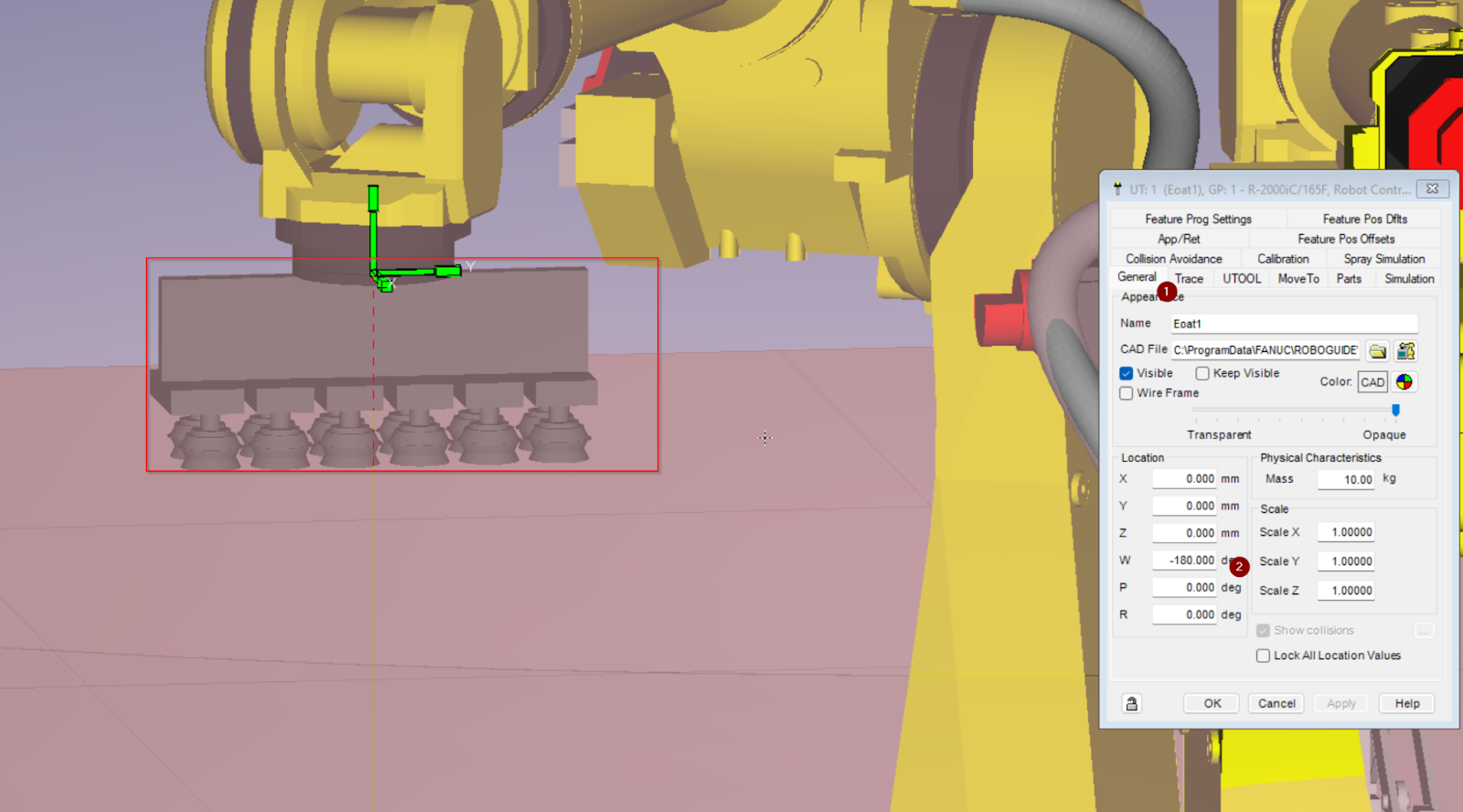
Gripperを追加します。
Done!ツールがロボットの先端部分にインストールされました。
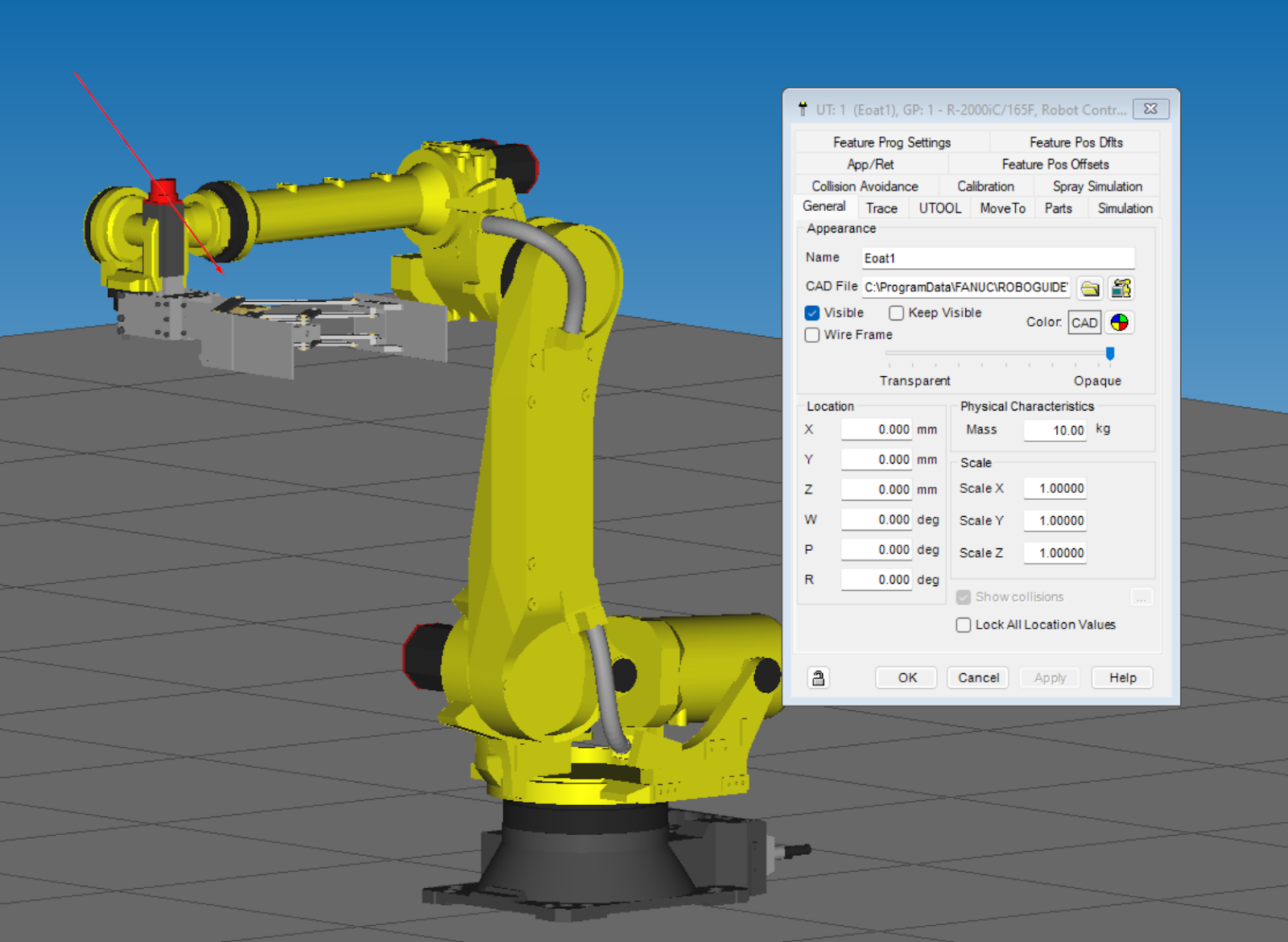
次はツールを正確な方向に調整しましょう。
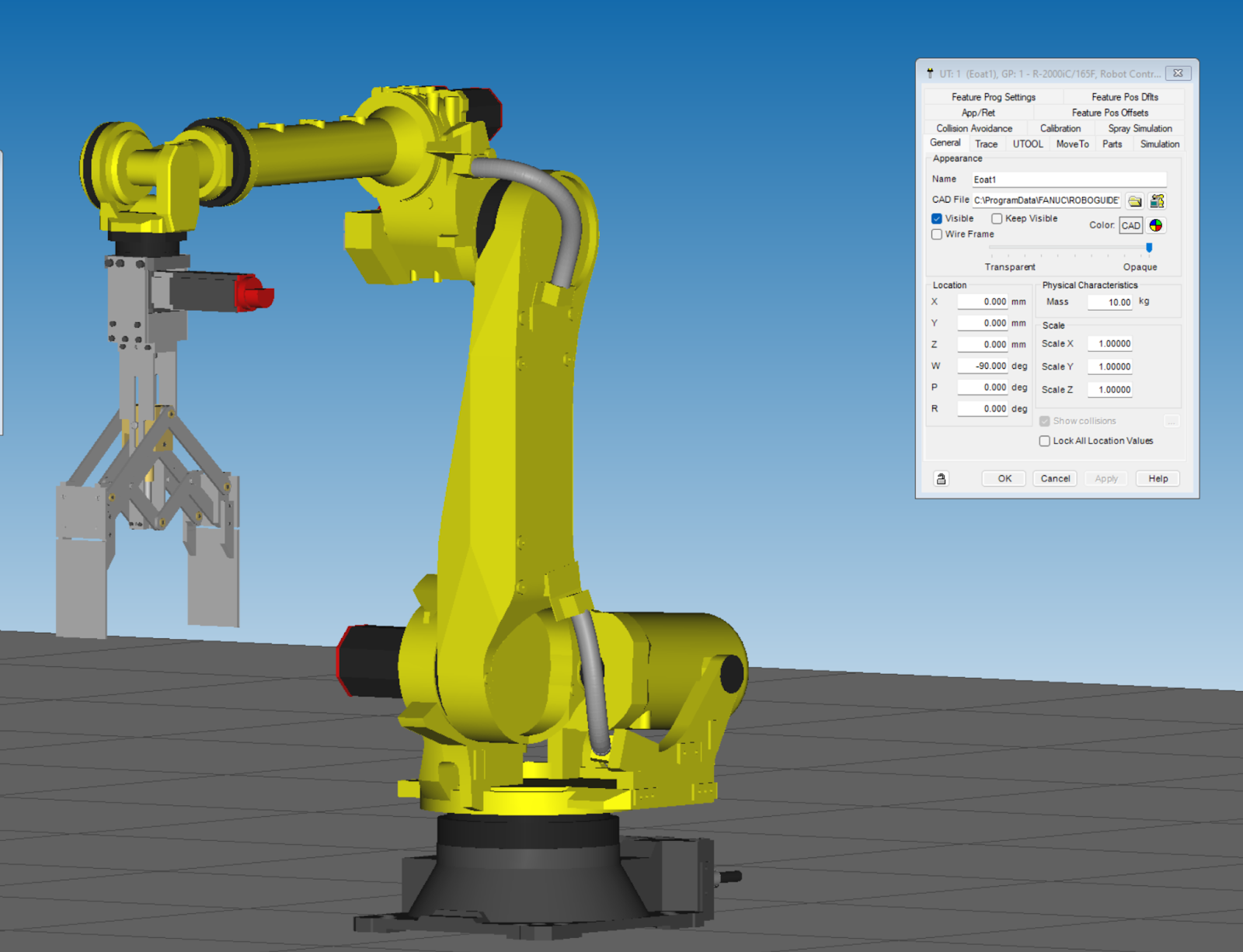
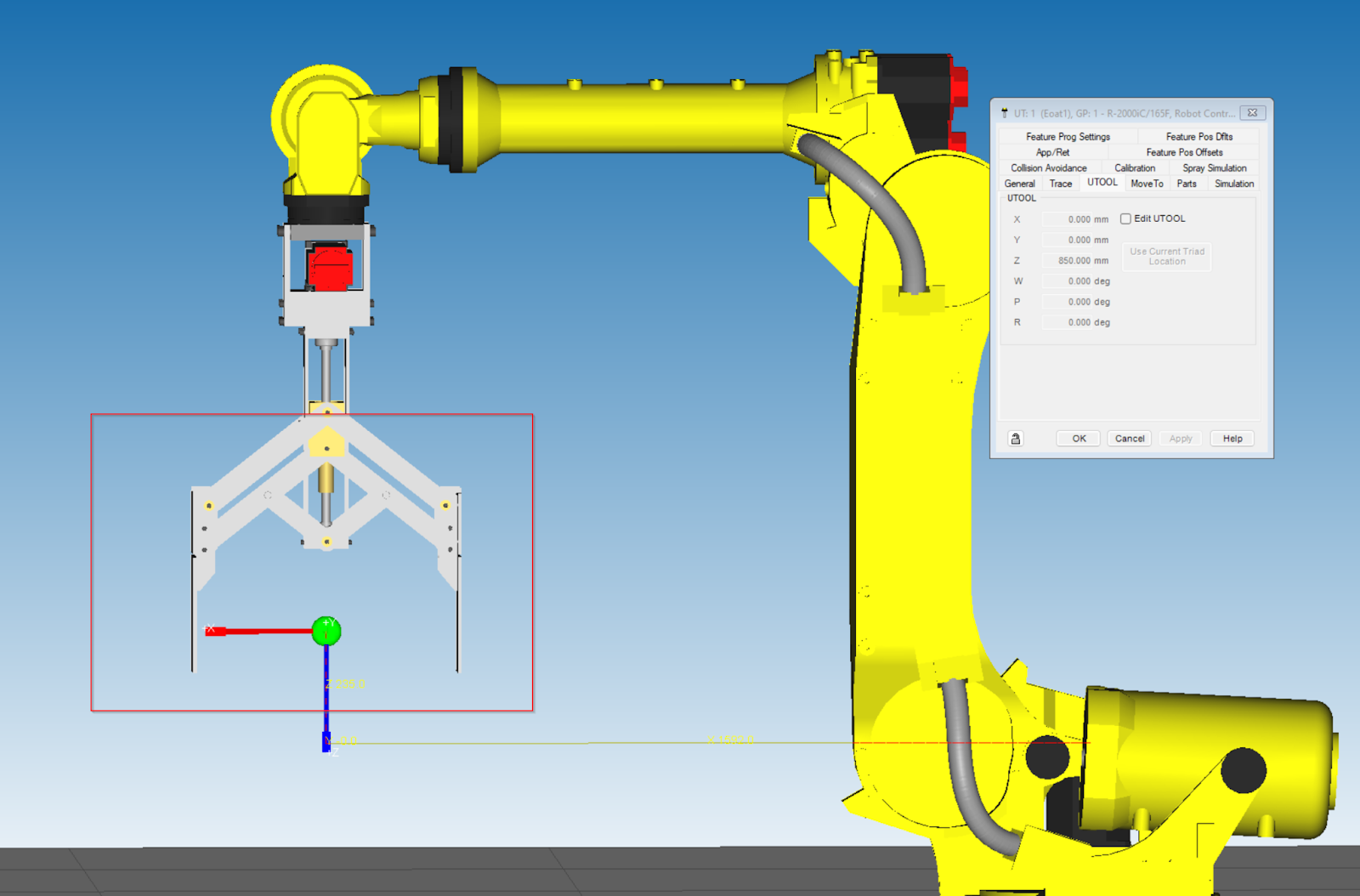
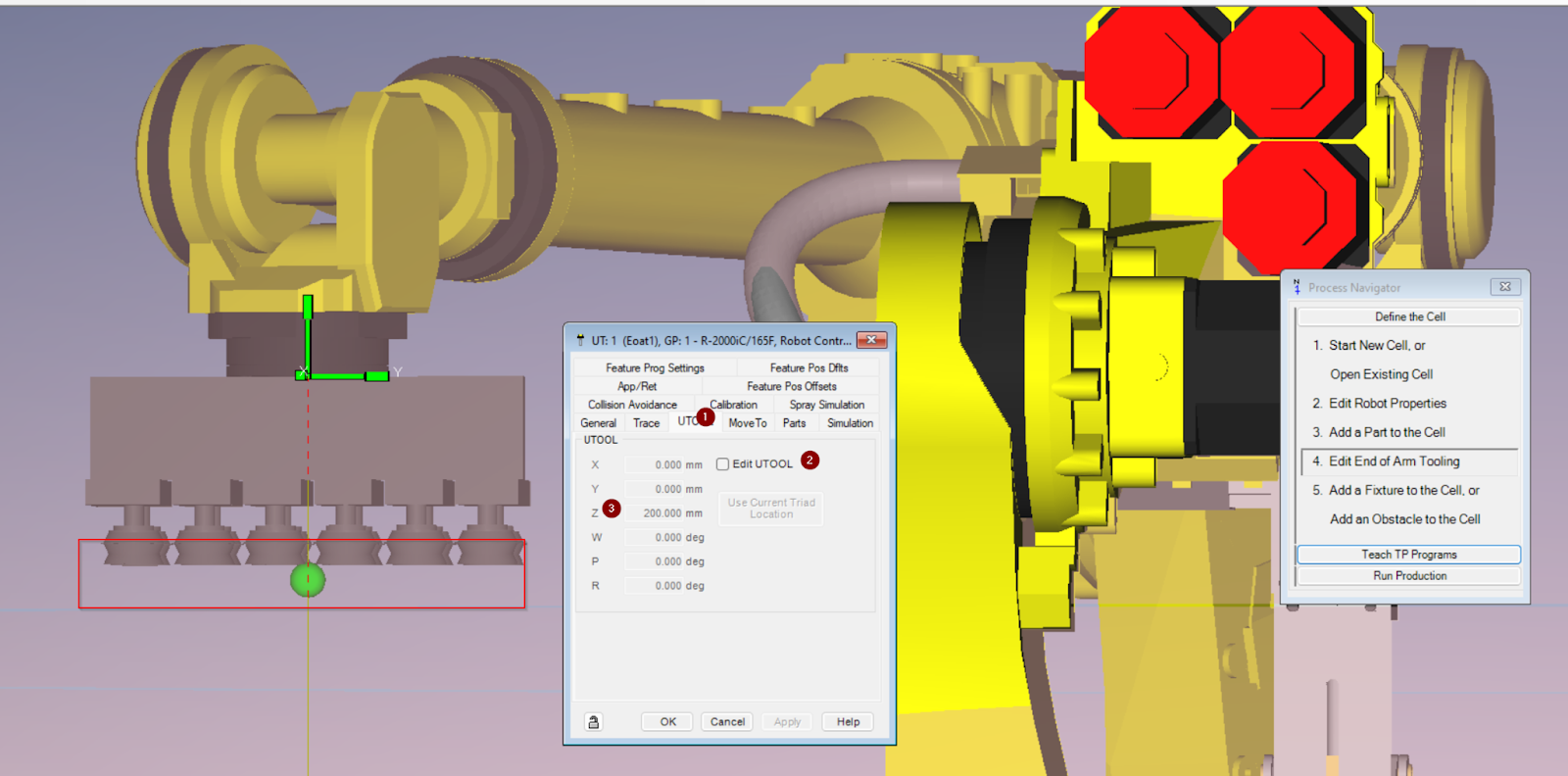
今度はTCPを調整します。
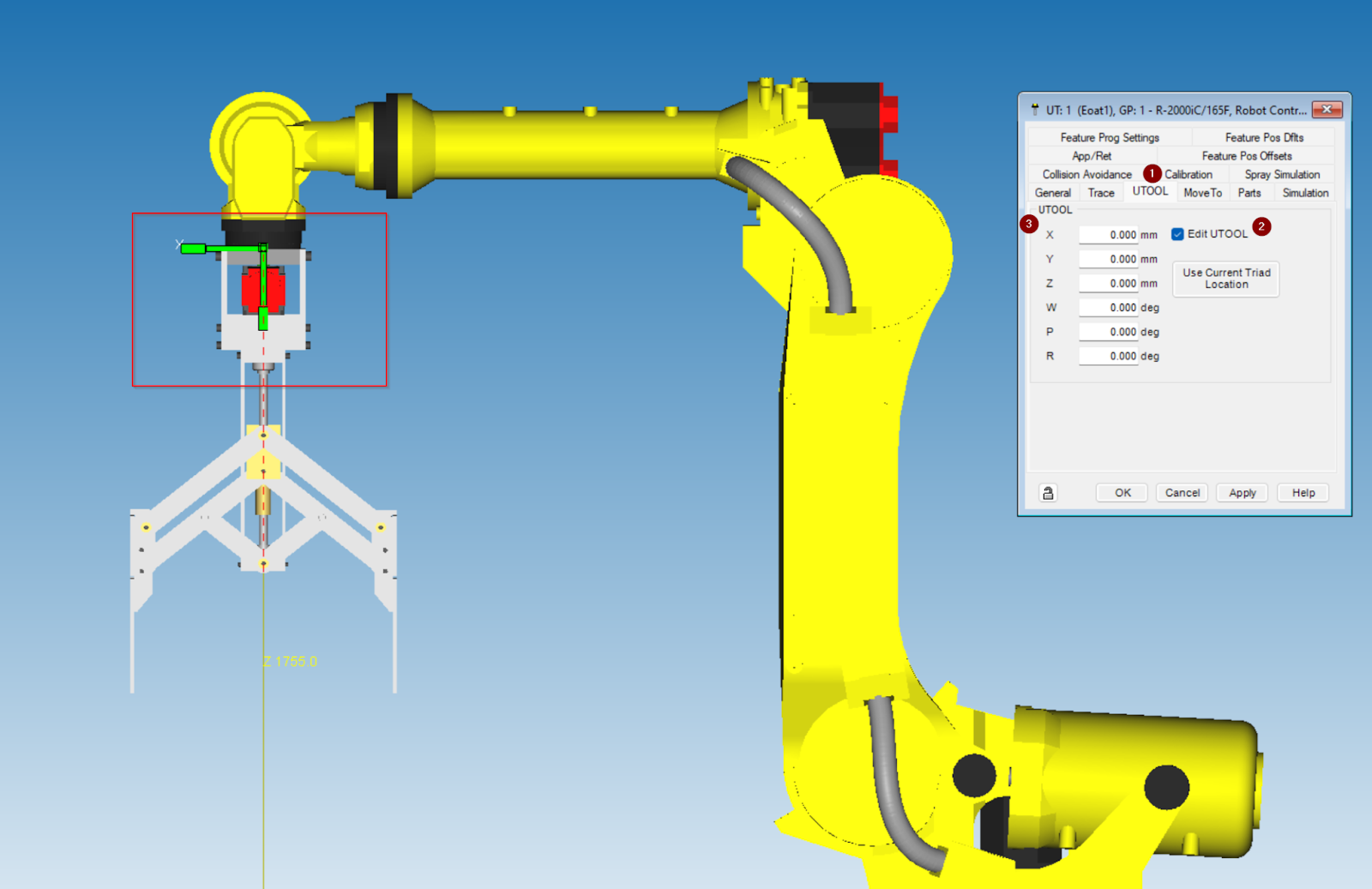
大体はこんな位置でOKです。
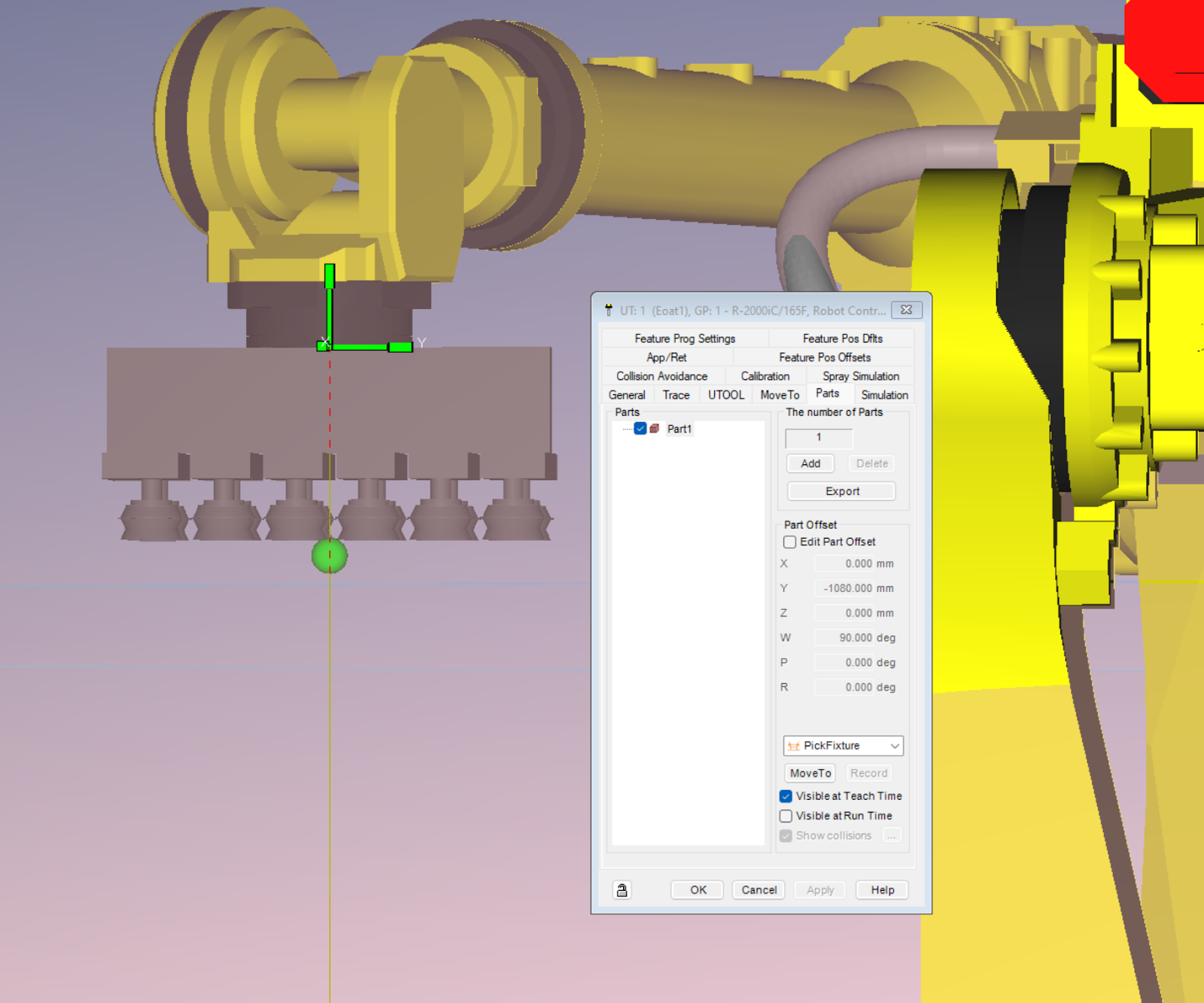
いまGripperにPartsを掴む動作を設定しています。
Move ToのTabを開き、先程追加したPartsをCheck入れましょう。
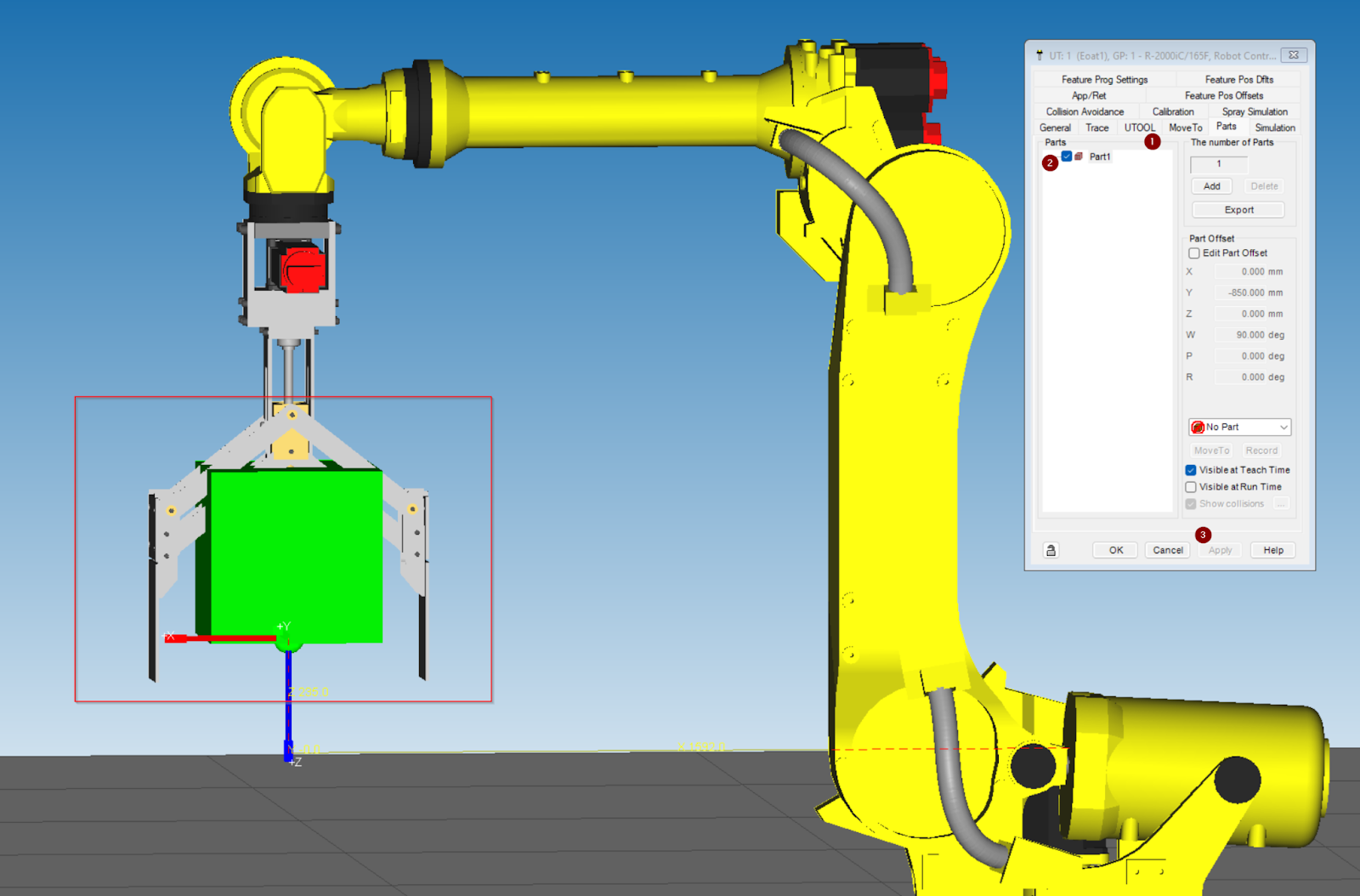
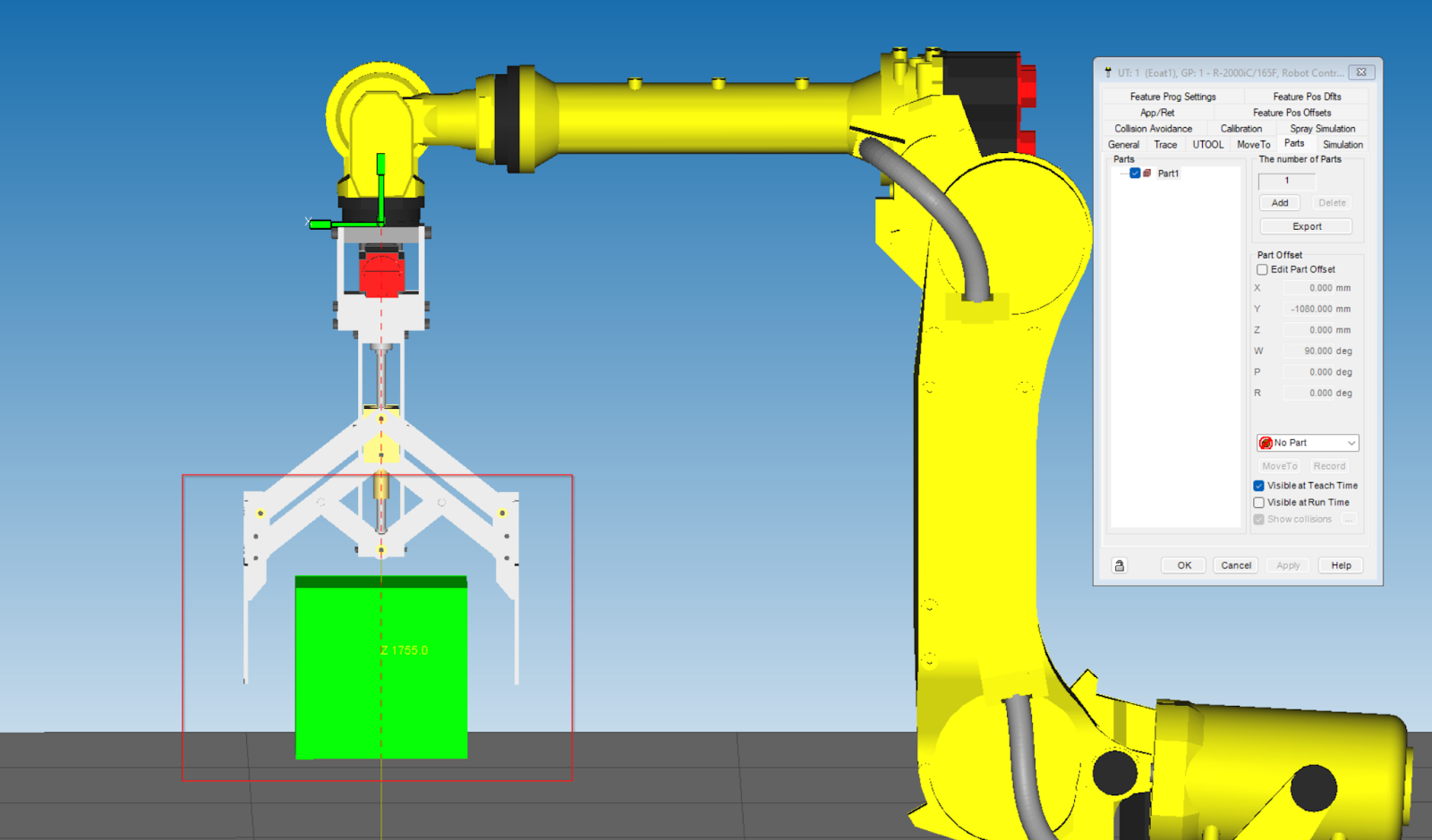
Offsetを修正しPartsがツールの真ん中に掴めるように移動します。
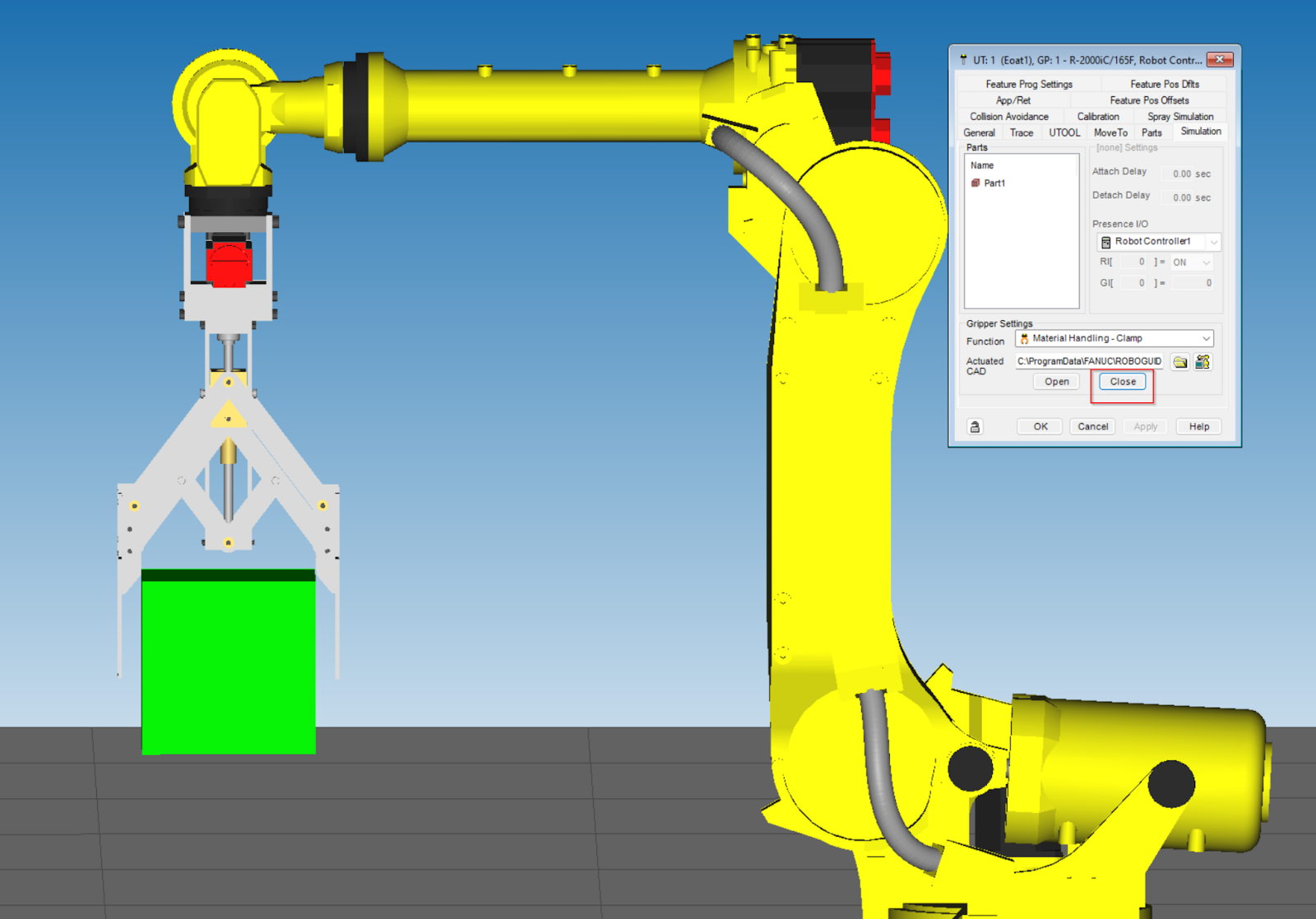
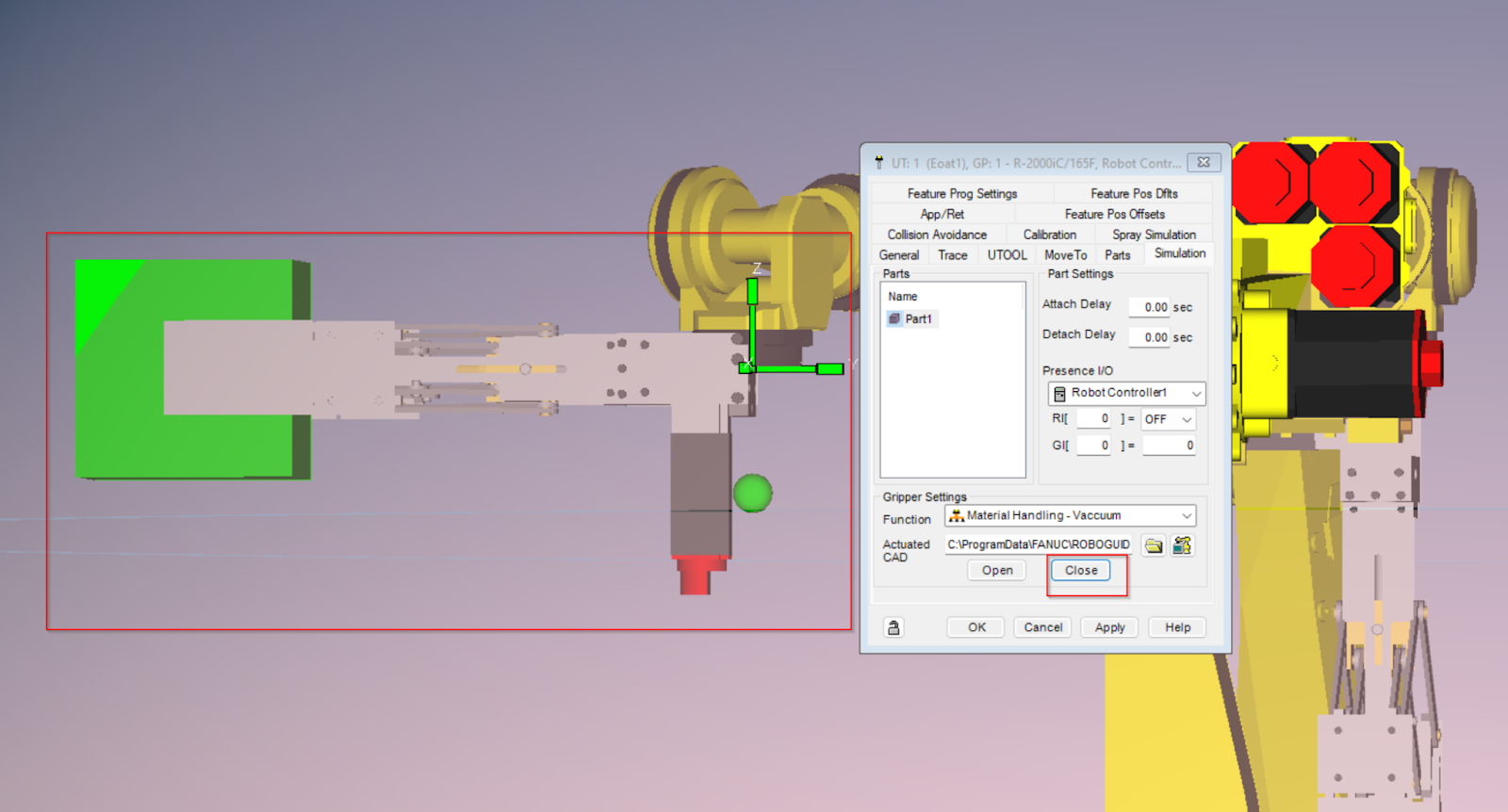
次はGripperがクロスするときの動作を設定します。Simulation Tabを開き、FunctionをClampを設定し、赤枠のボタンをクリックします。
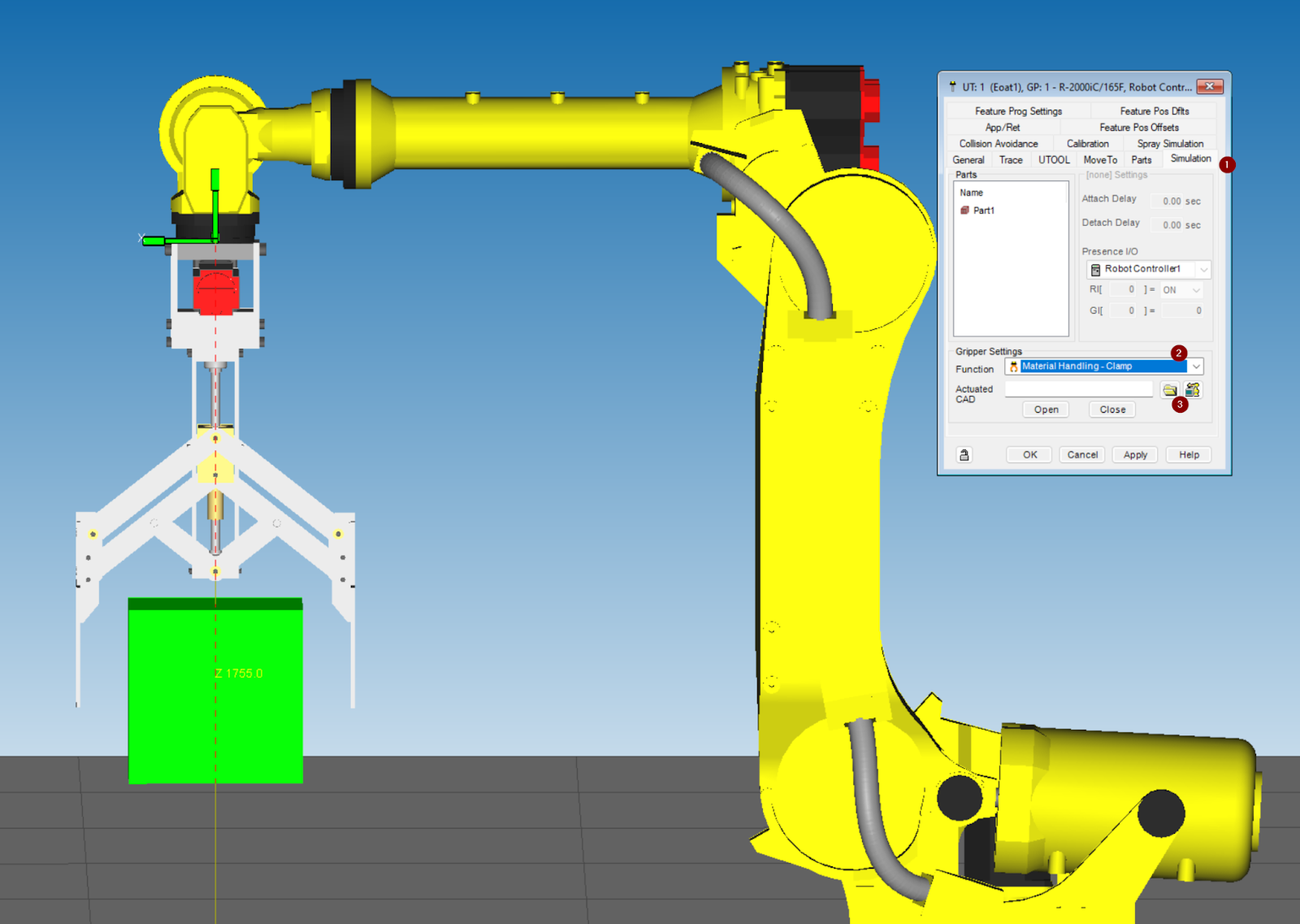
今度はGripperがクロスするときのCAD Fileを設定しましょう。
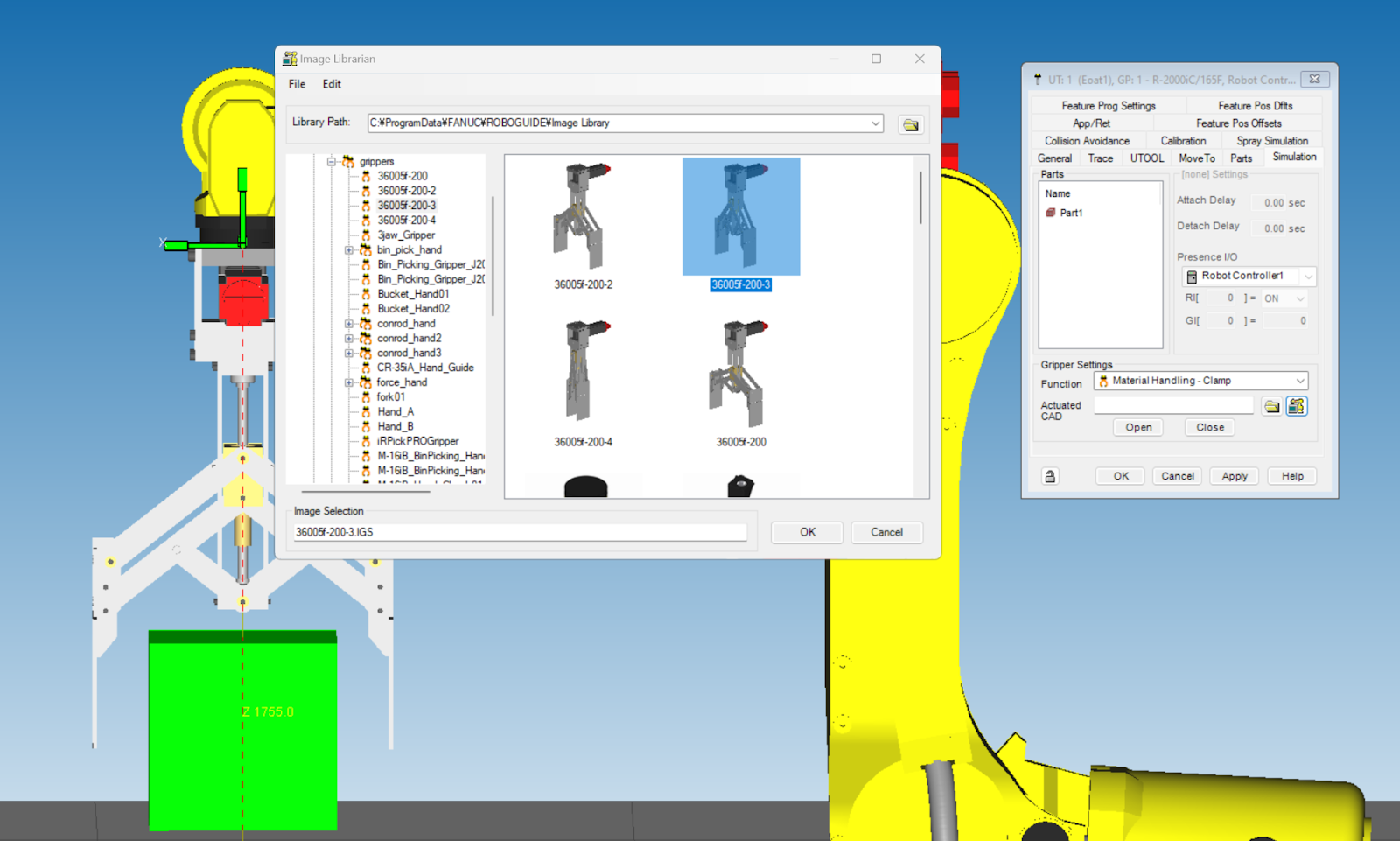
Done!
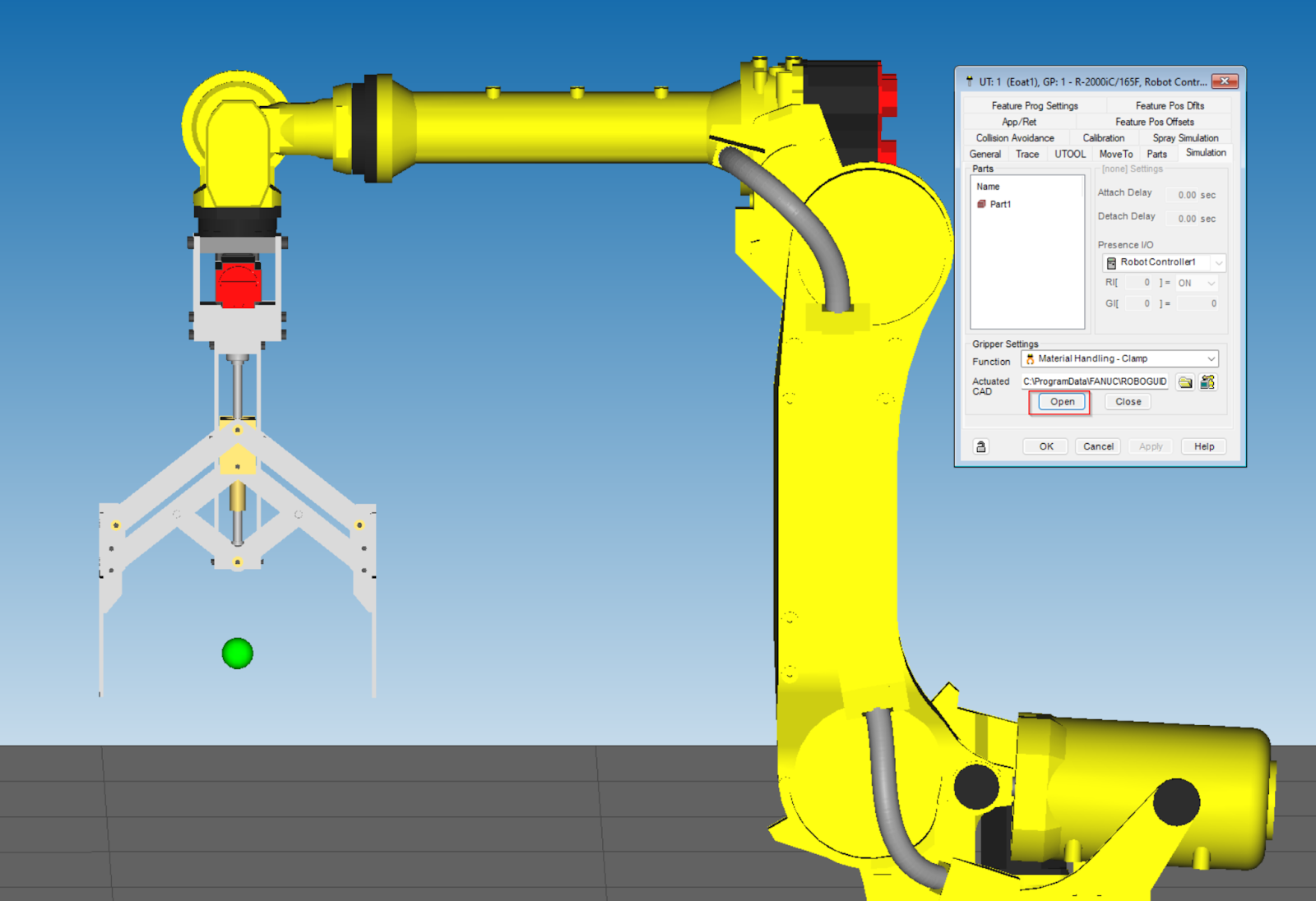
Open/Closeボタンをクリックし、動作確認してください。
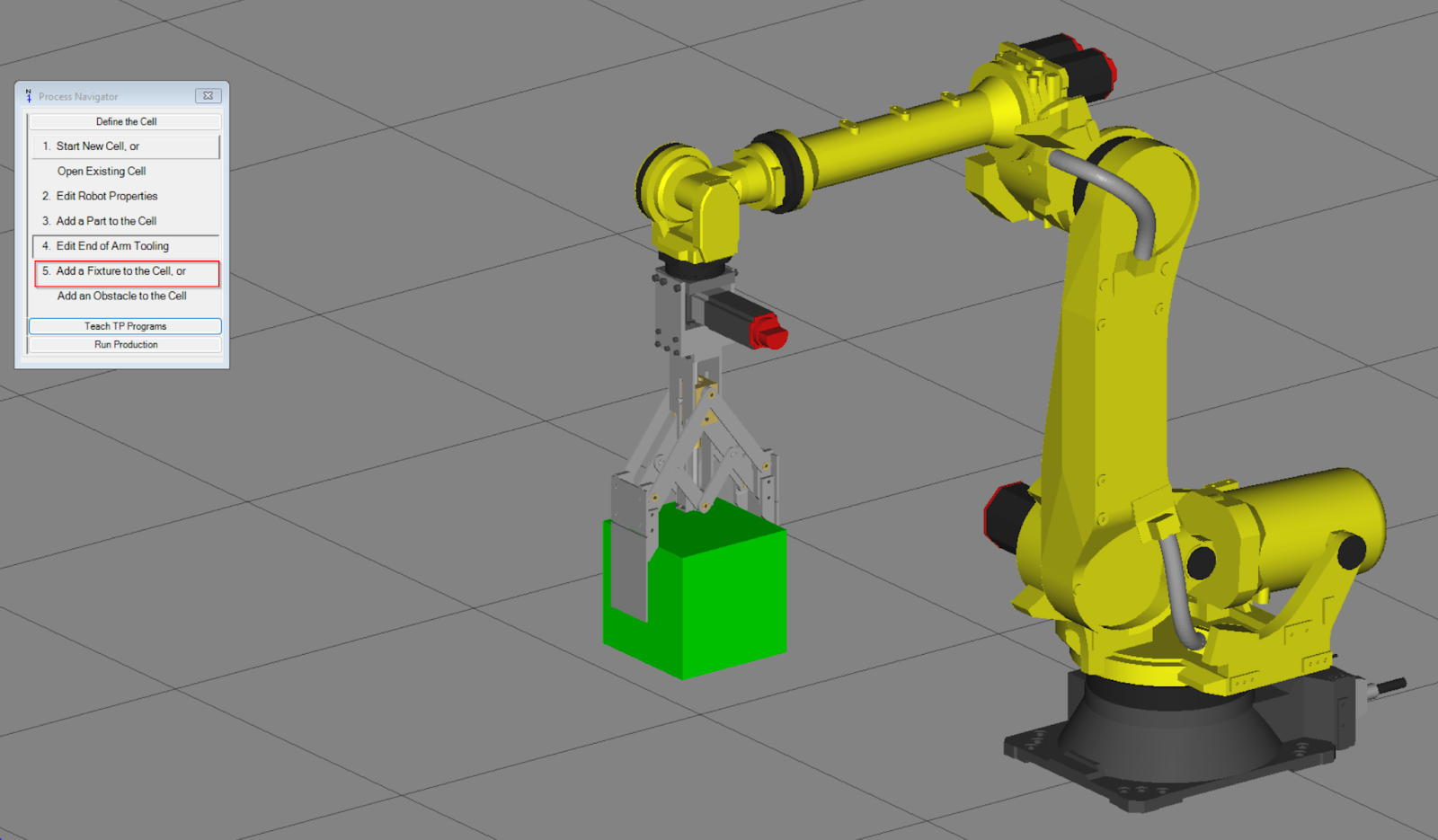
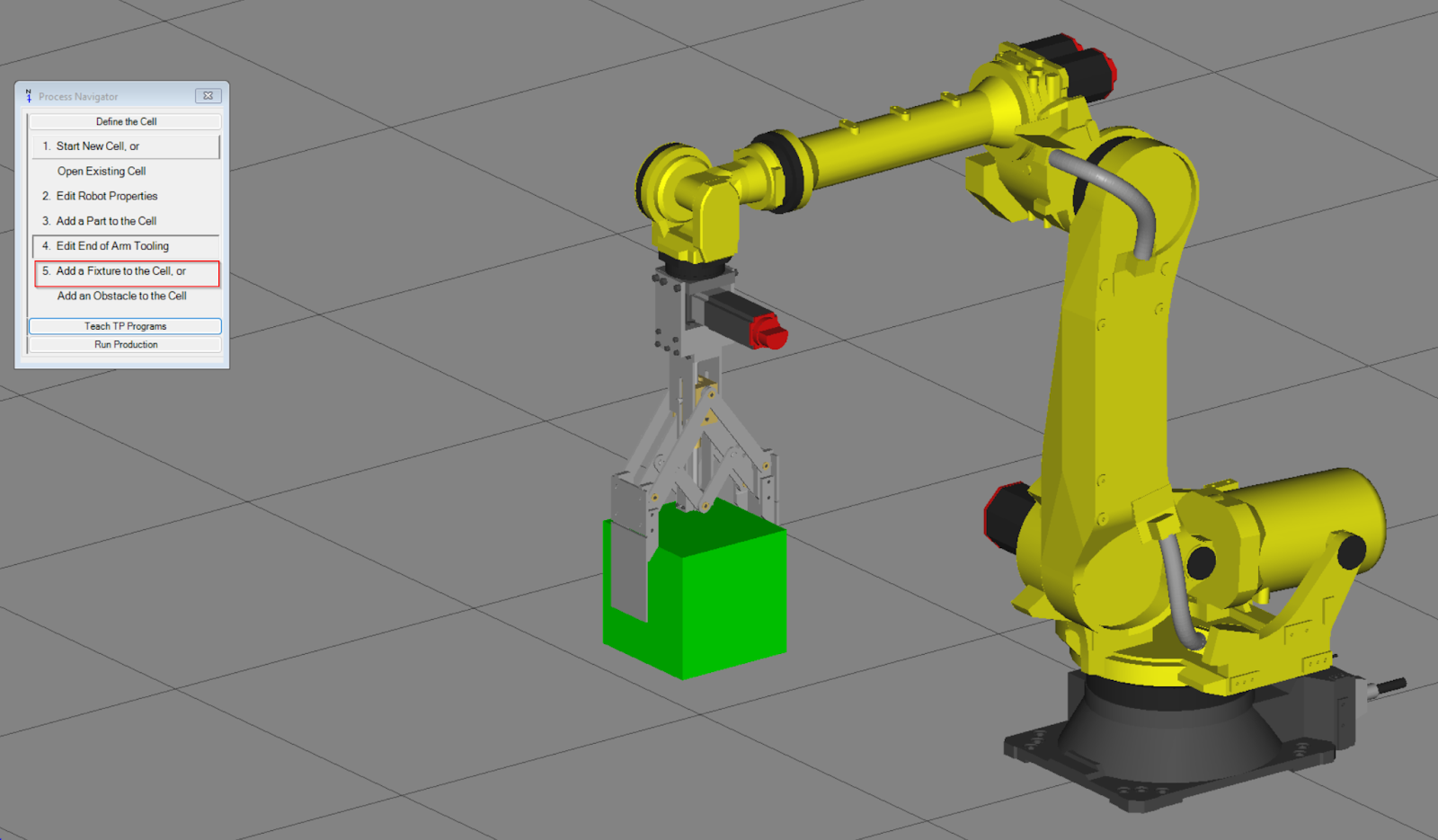
Add Fixture
Partsの置台を生成するため、Add a Fixture to the Cellをクリックします。
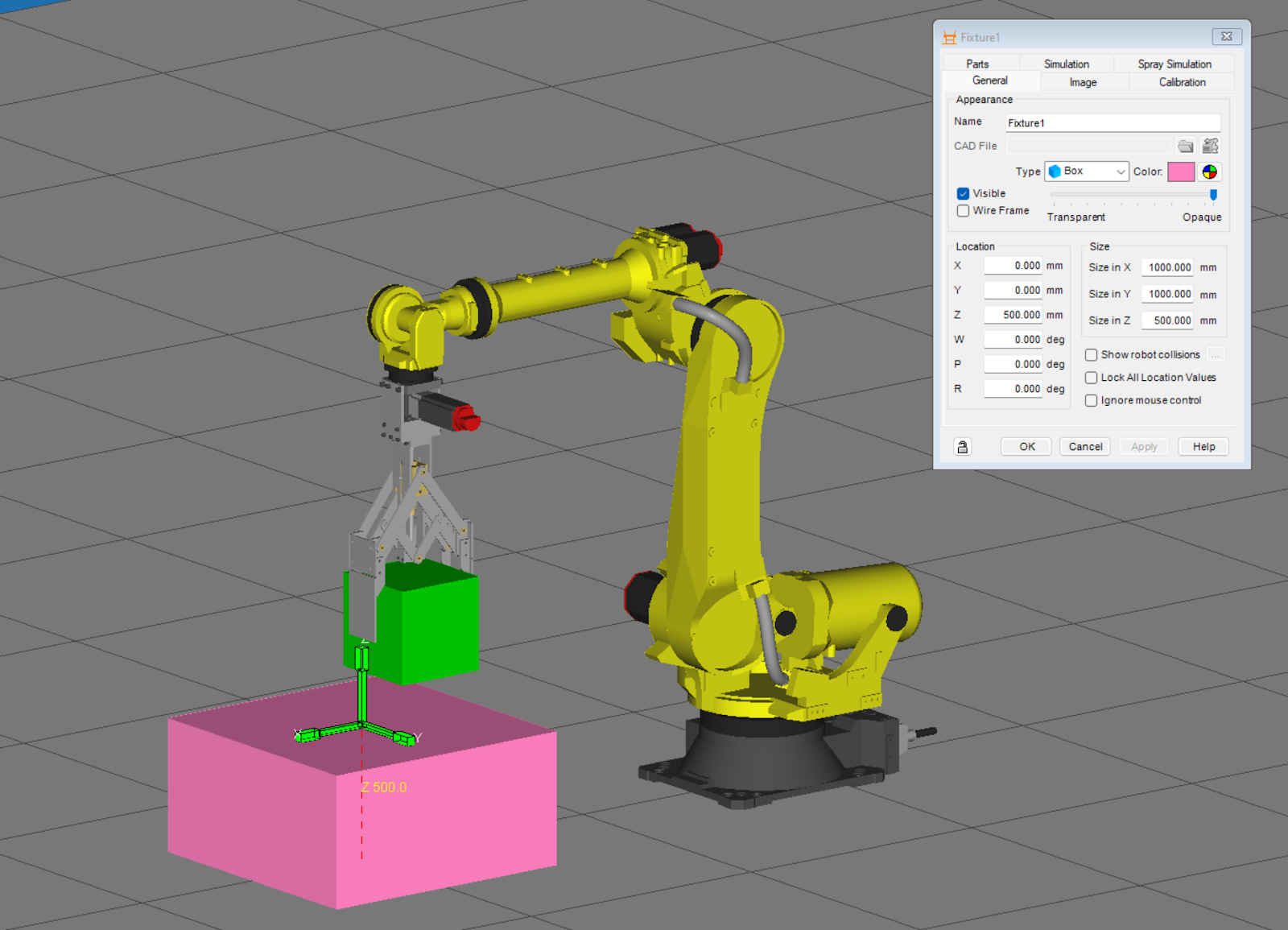
Done!Fixtureが追加されました。
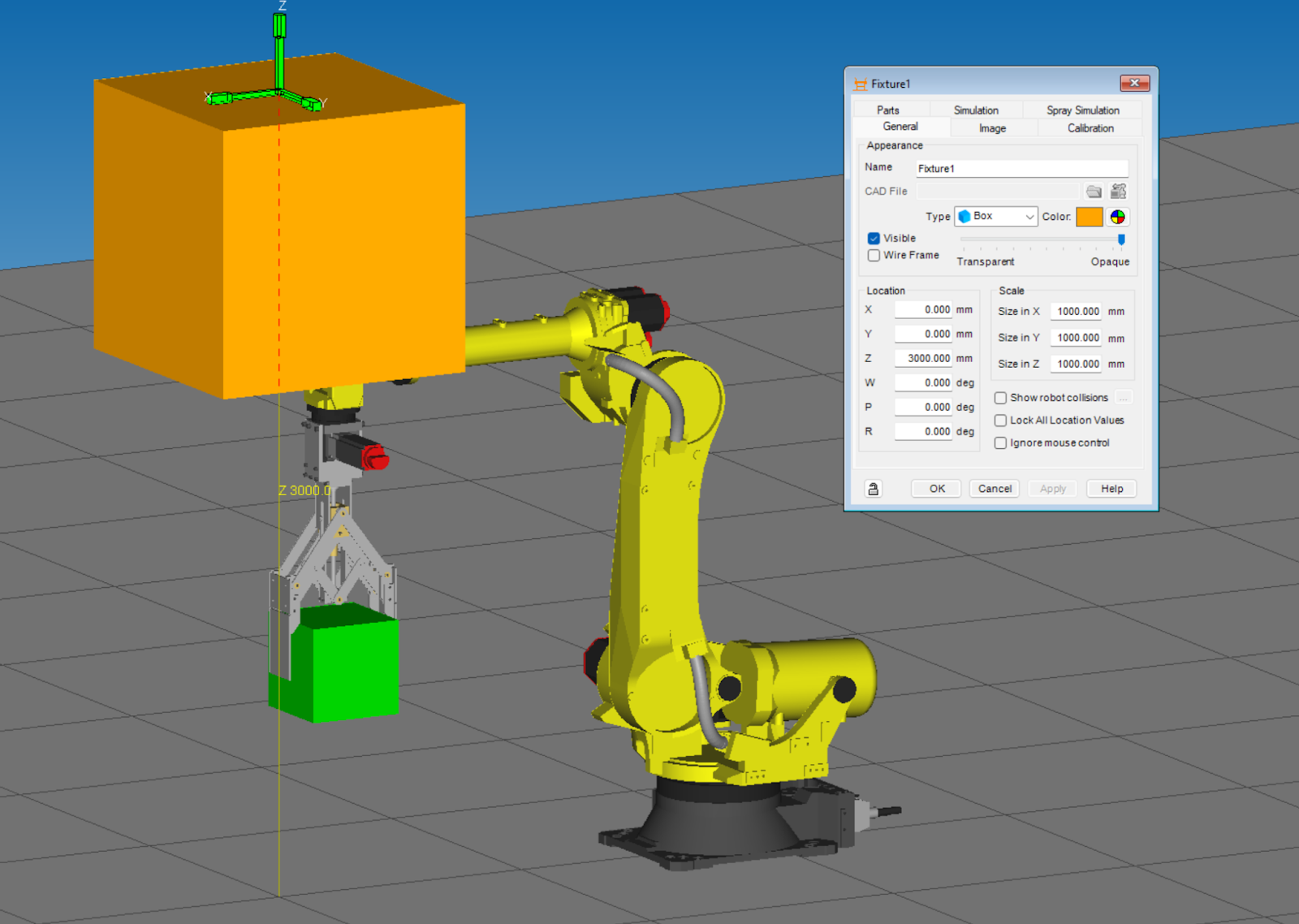
置台の大きさや色を調整してください。
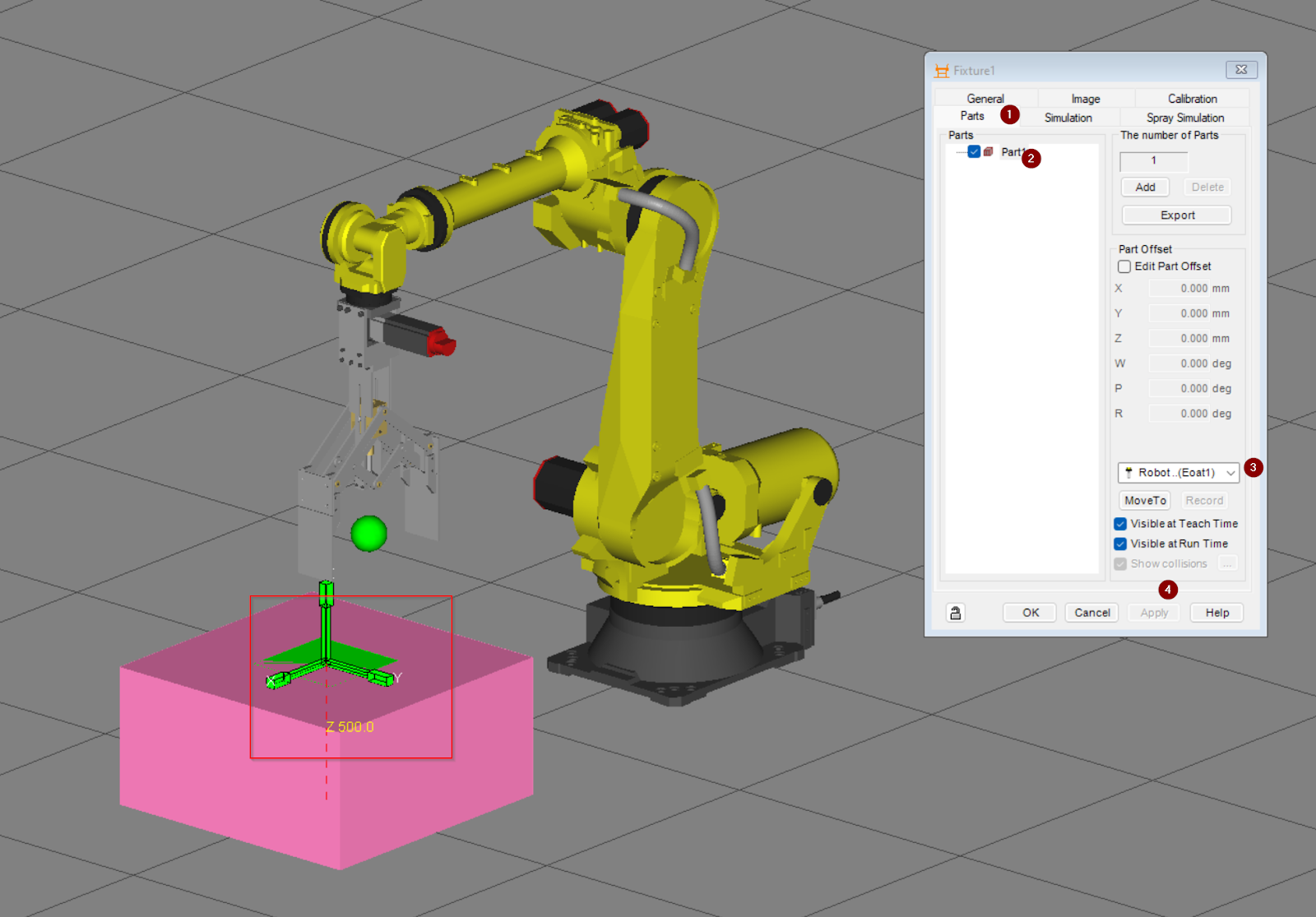
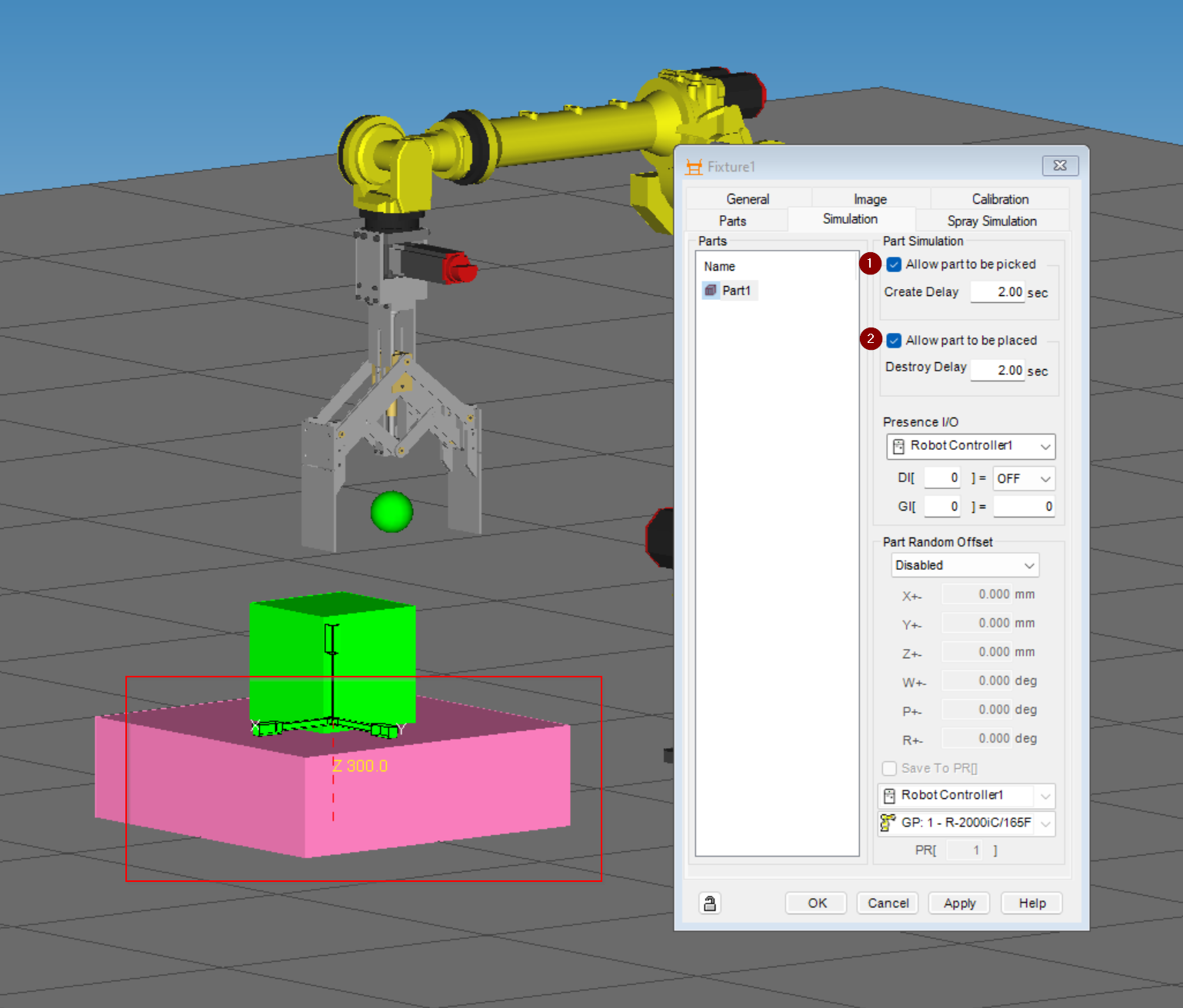
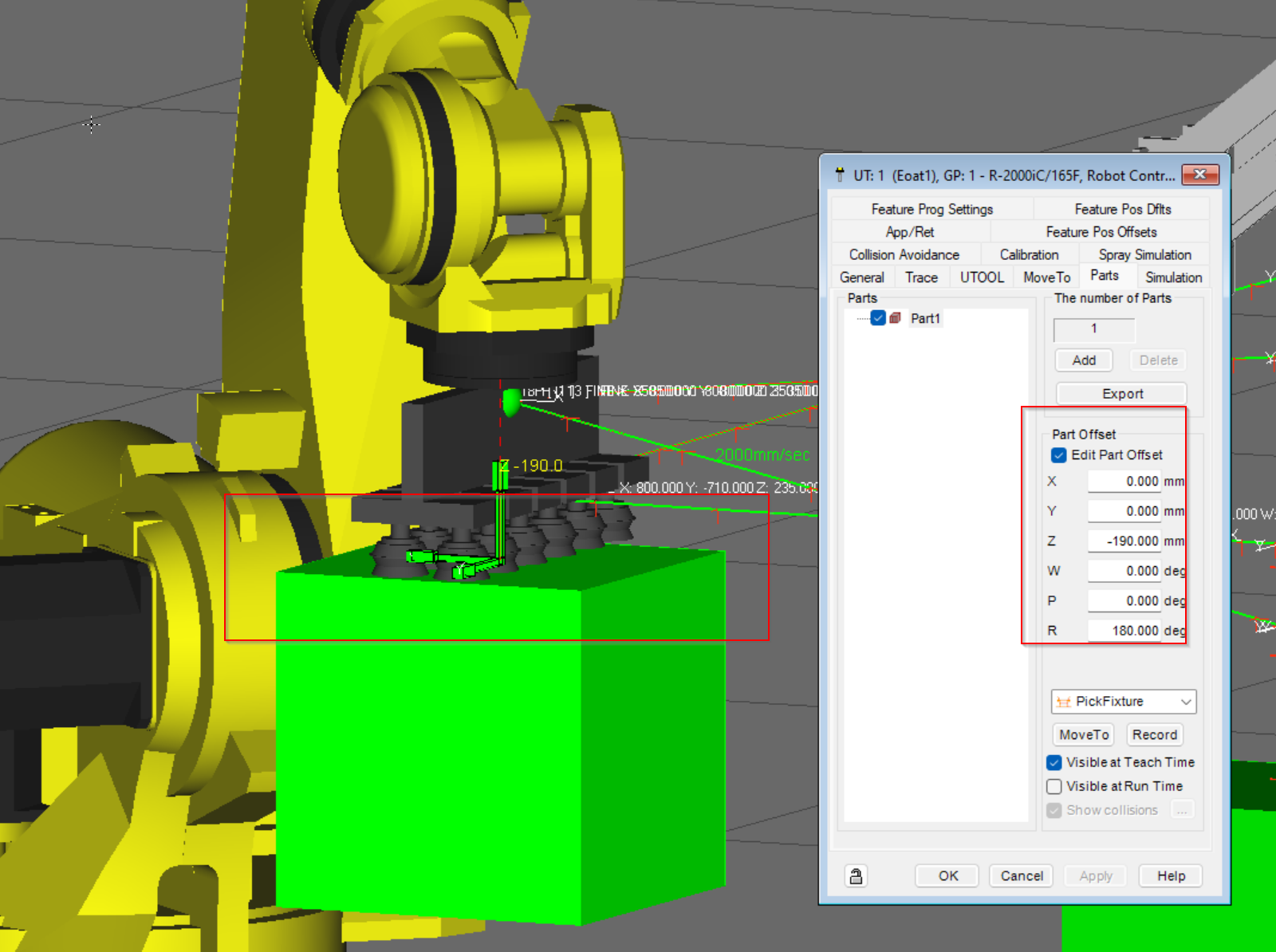
次は置台に先ほど追加したPartsを置きたいので、Parts TabにあるPartをCheck入れましょう。
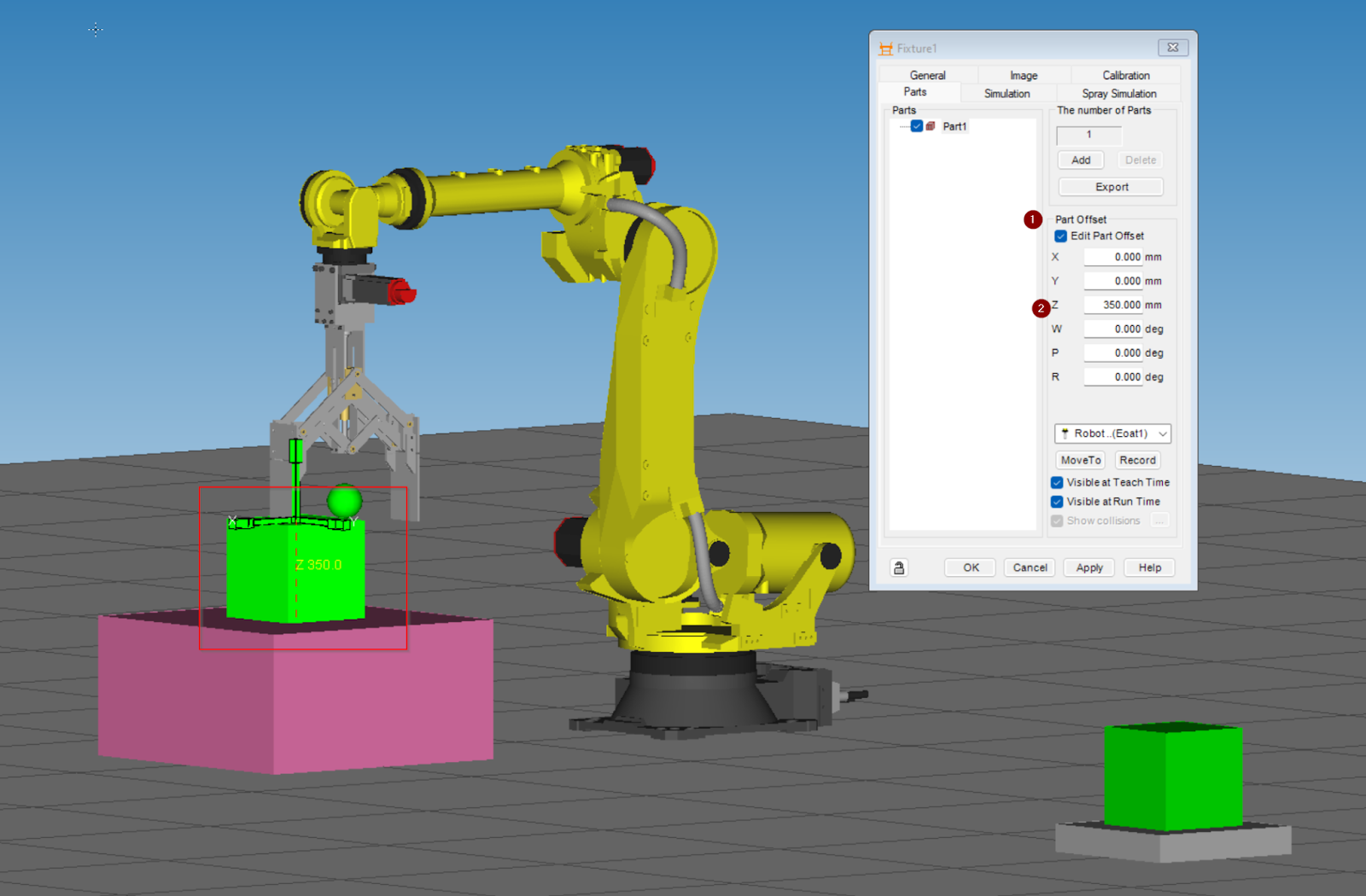
次はOffset項目からPartsの位置を調整しましょう。
SimulationのTabでPickup とPlacedの遅延を設定します。
ADD MORE
ロボットがPartsを置き台1から置台2に置きますので、先と同じ操作でFixturesをもう一個追加します。
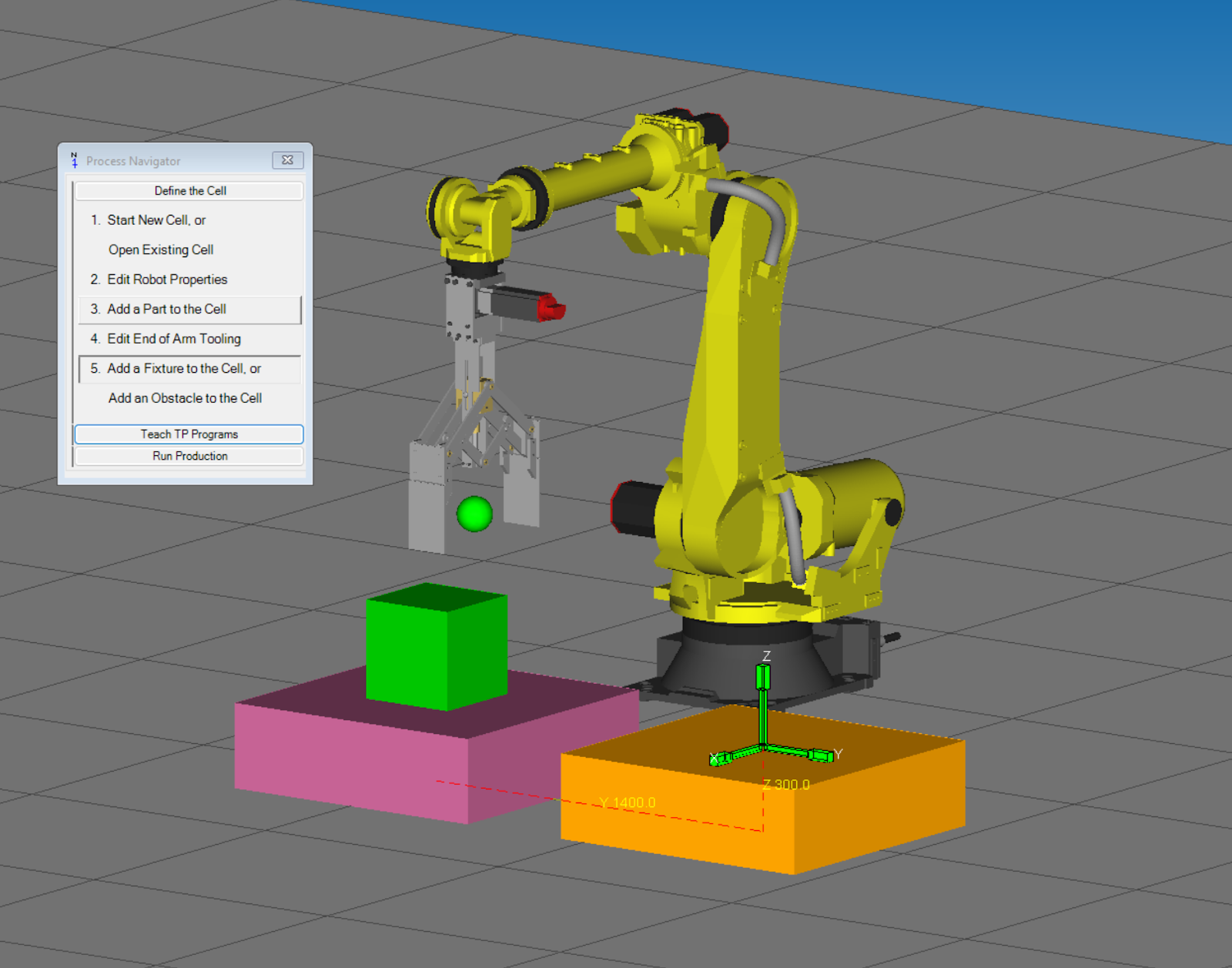
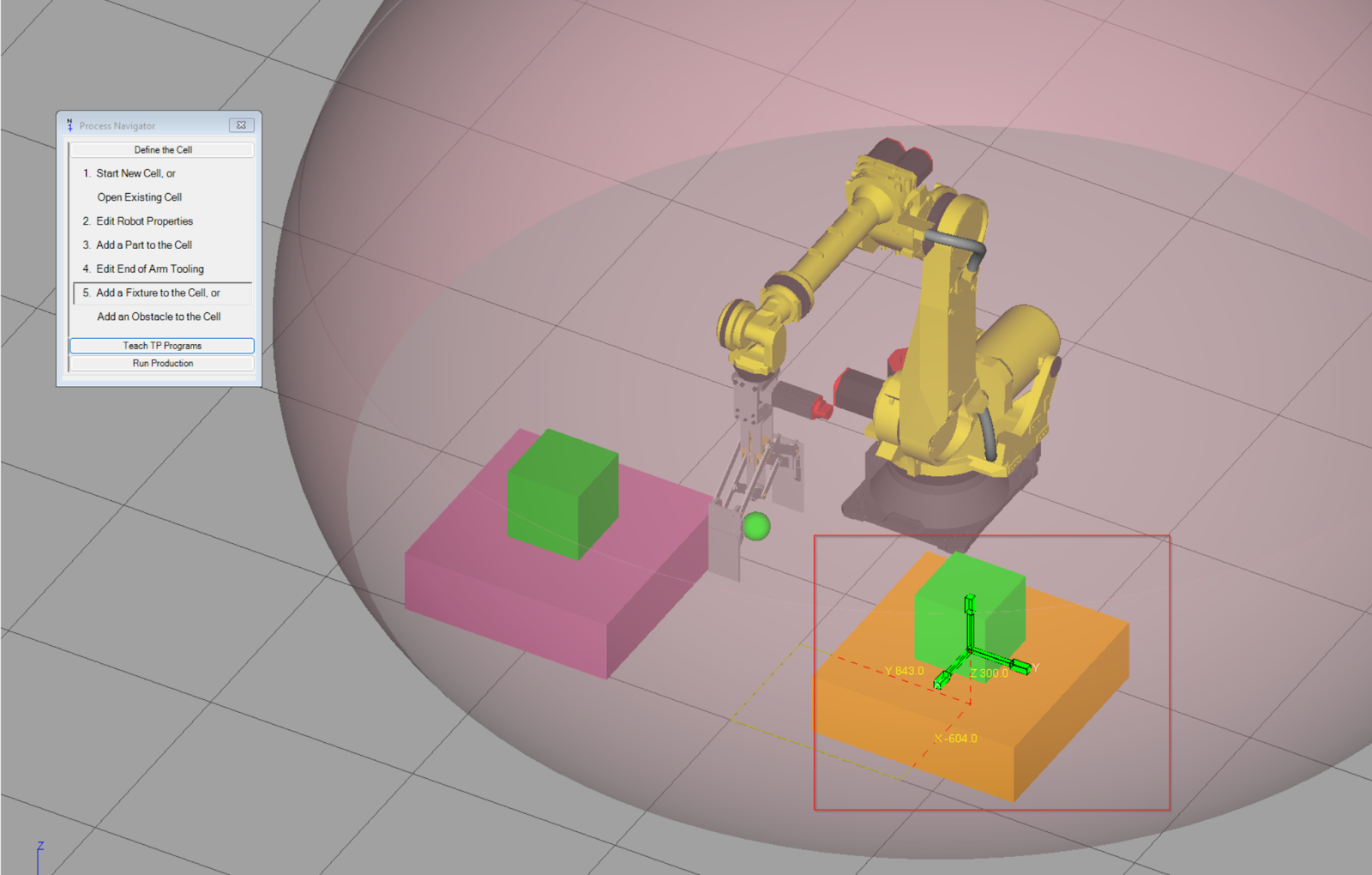
置台の位置を調整するとき、ロボットの可動範囲を確認しましょう。

Done!
ADD Simulation Program
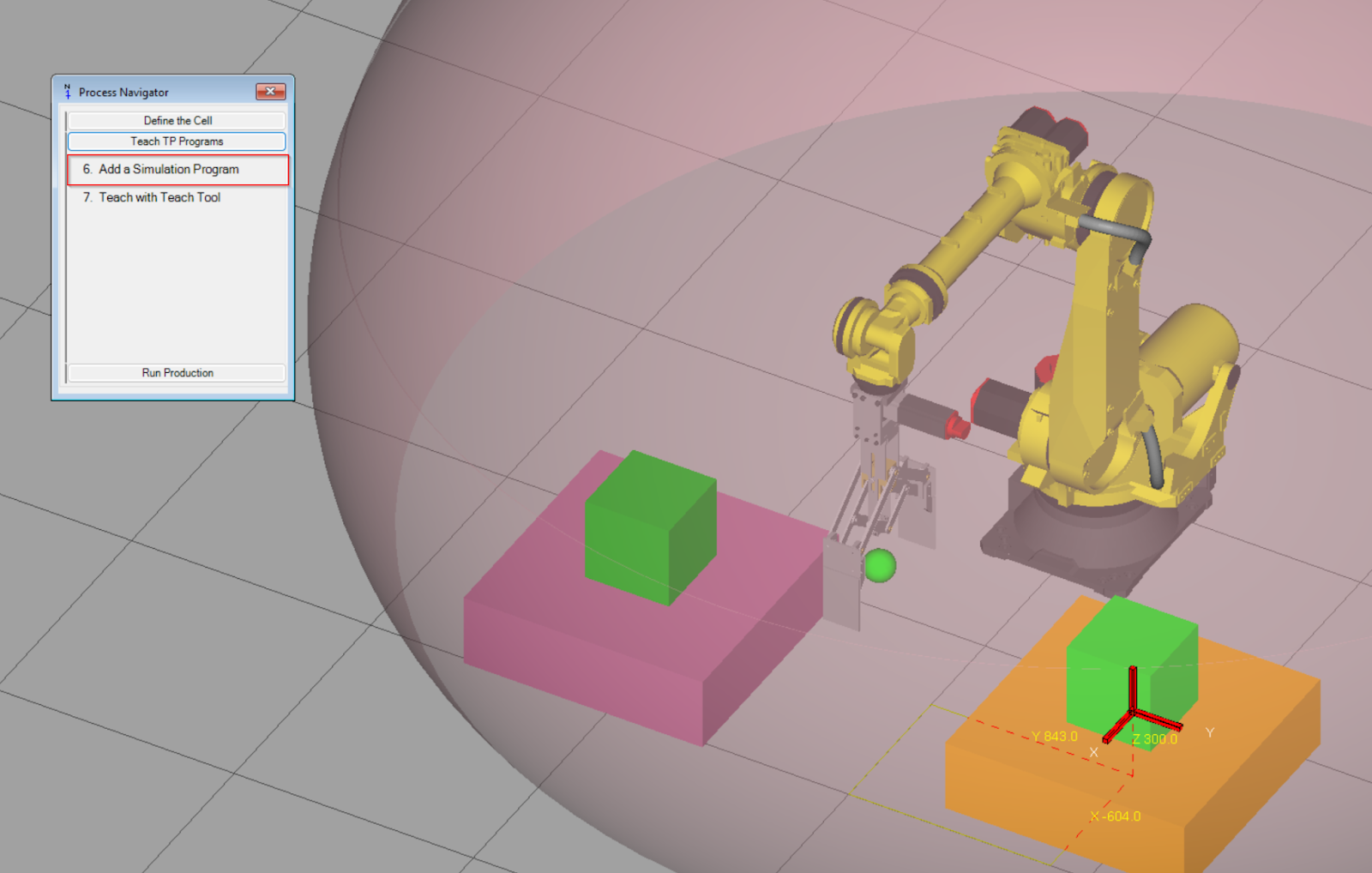
最後はシミュレーションのプログラムを追加するため、Teach TP Programsをクリックします。

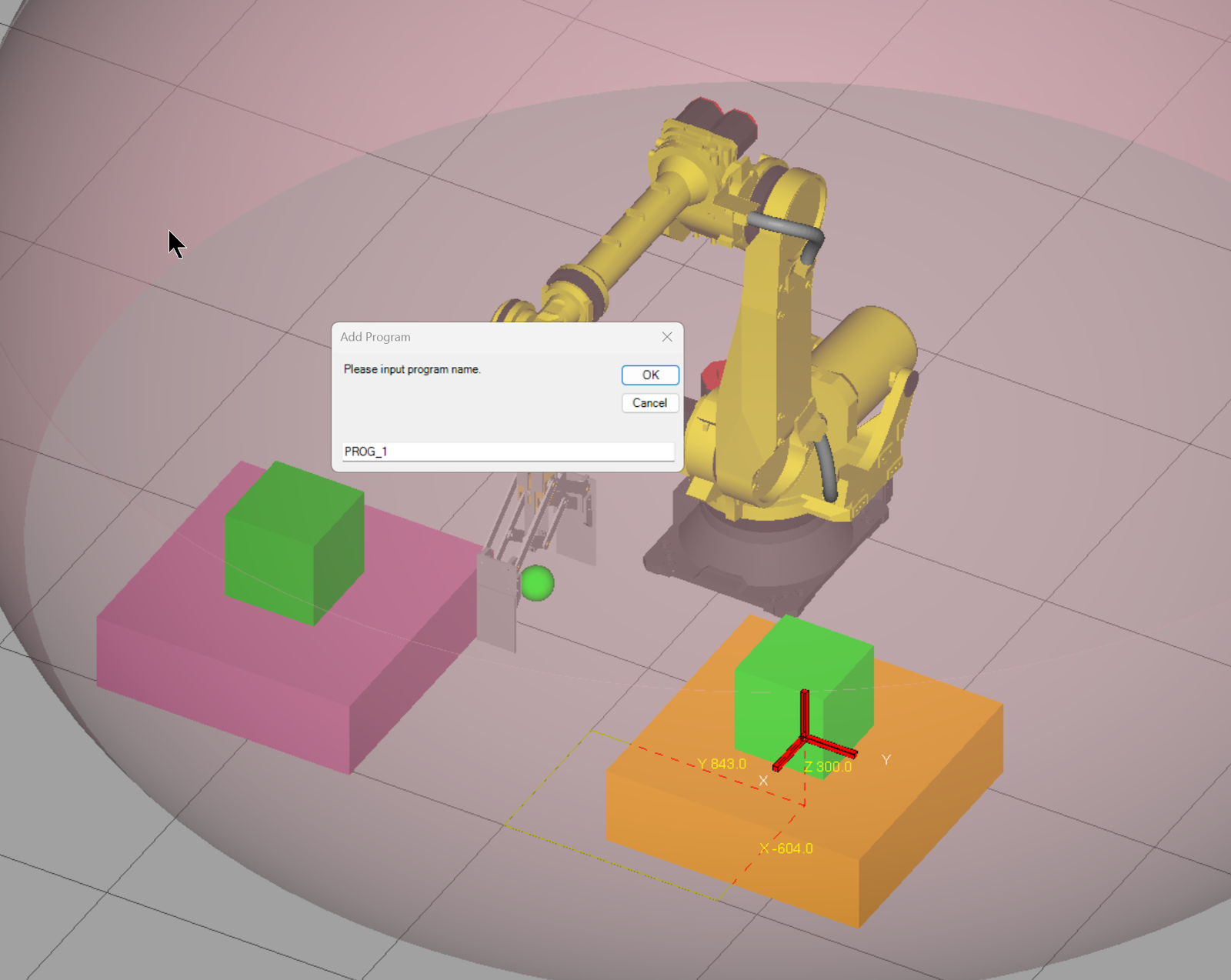
Add a Simulation Programをクリックします。
シミュレーションプログラム名を入力します。
Done!
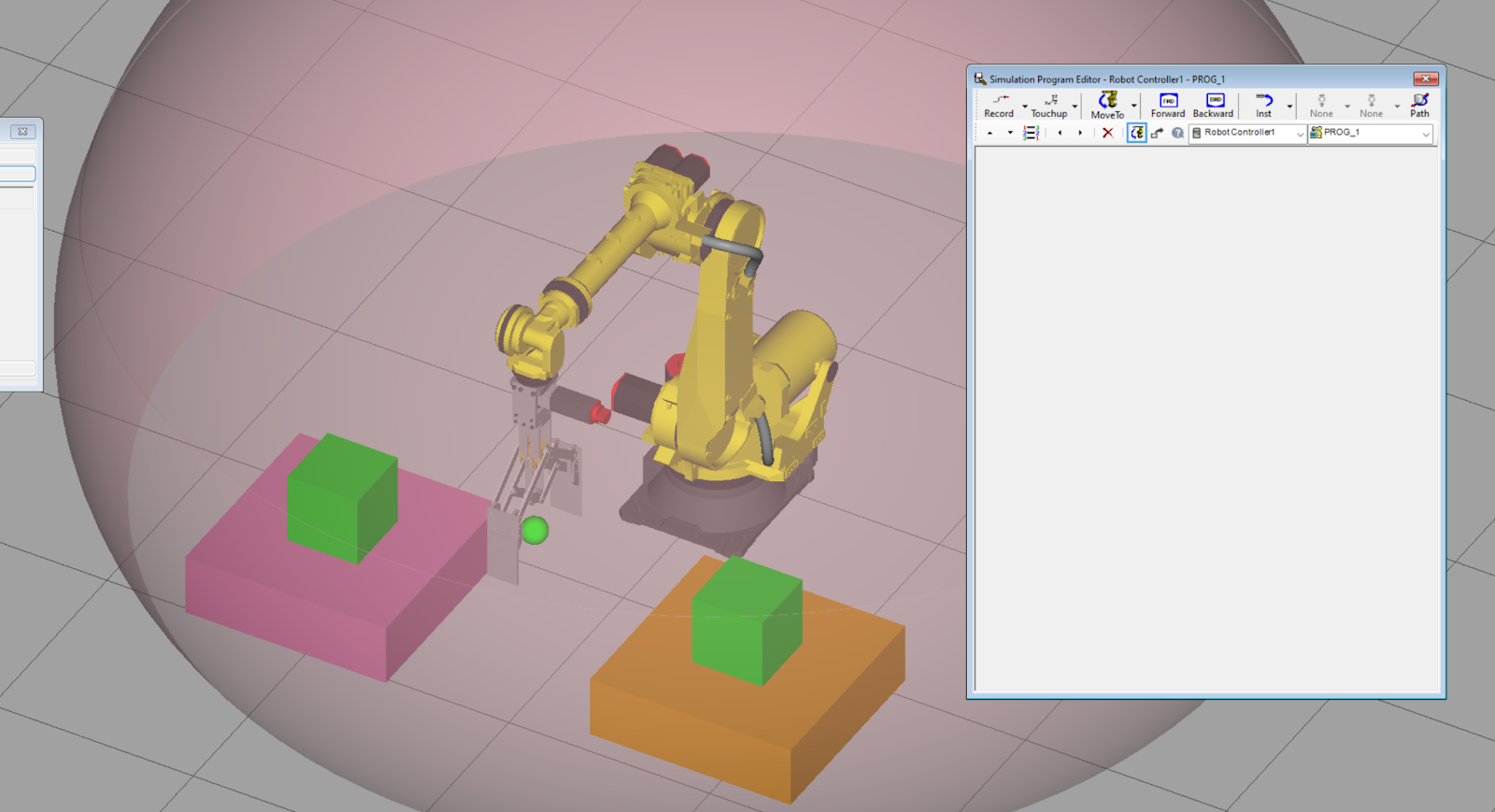
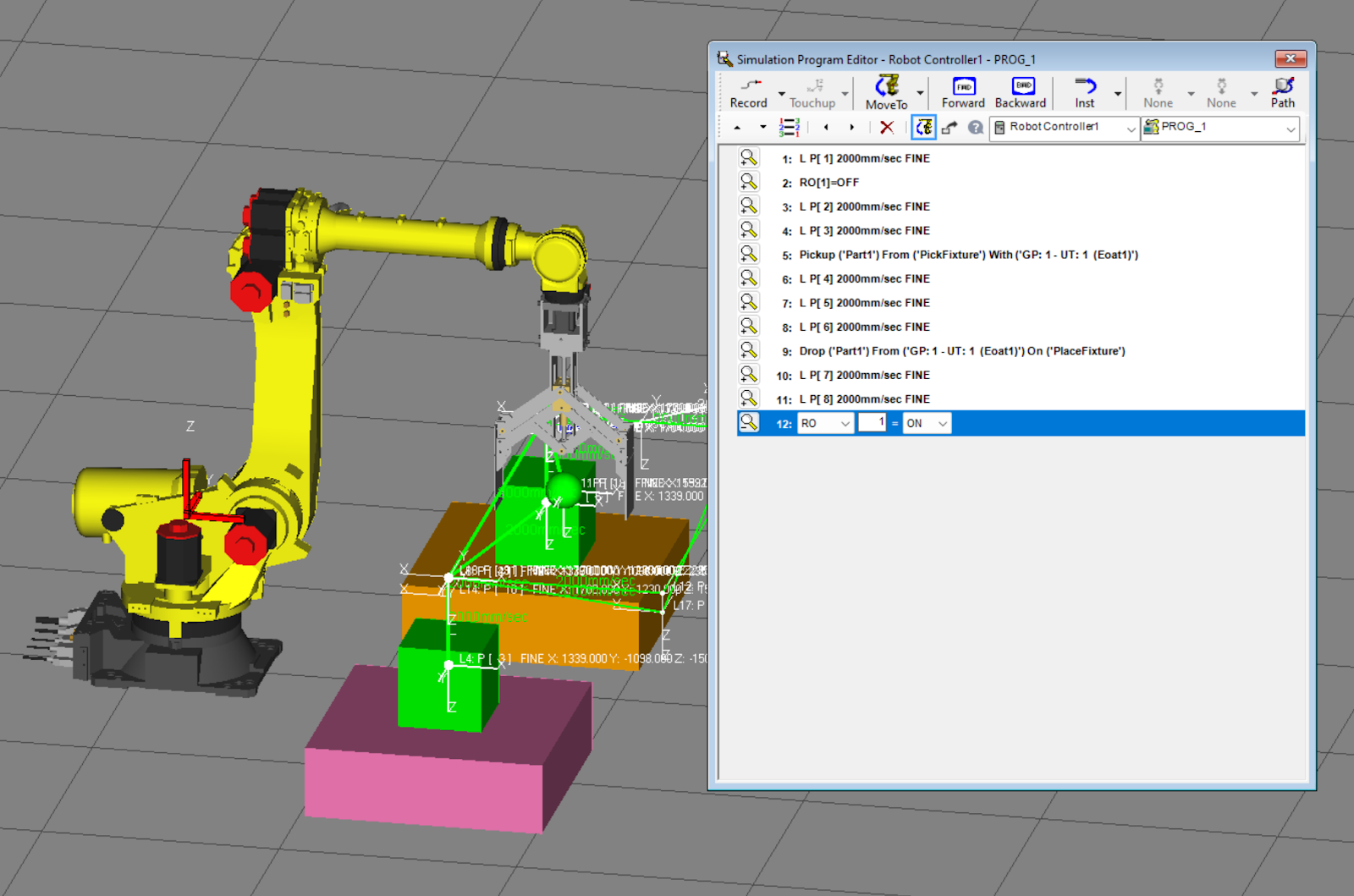
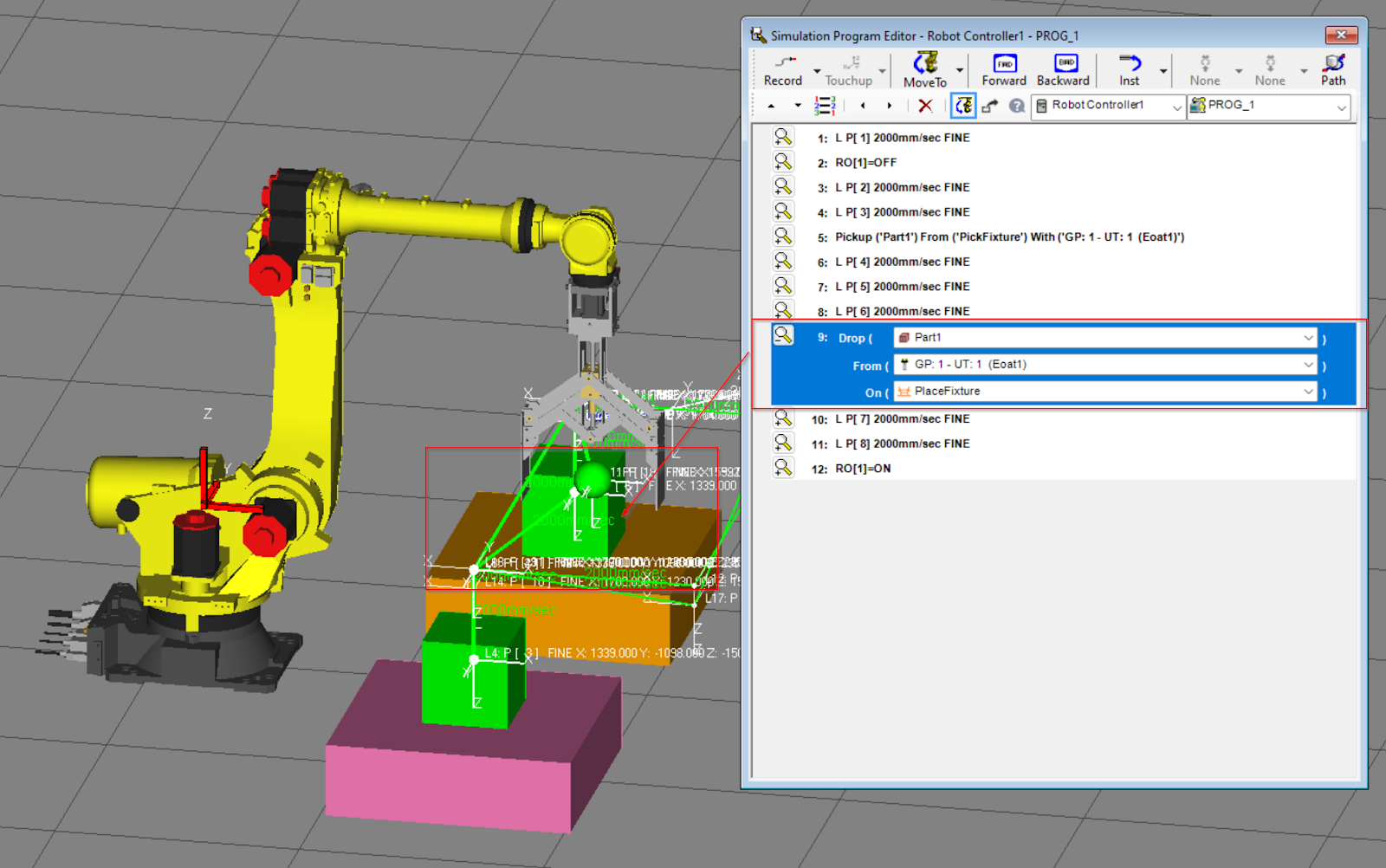
シミュレーションプログラムは簡単なPick And Place動作のみです。
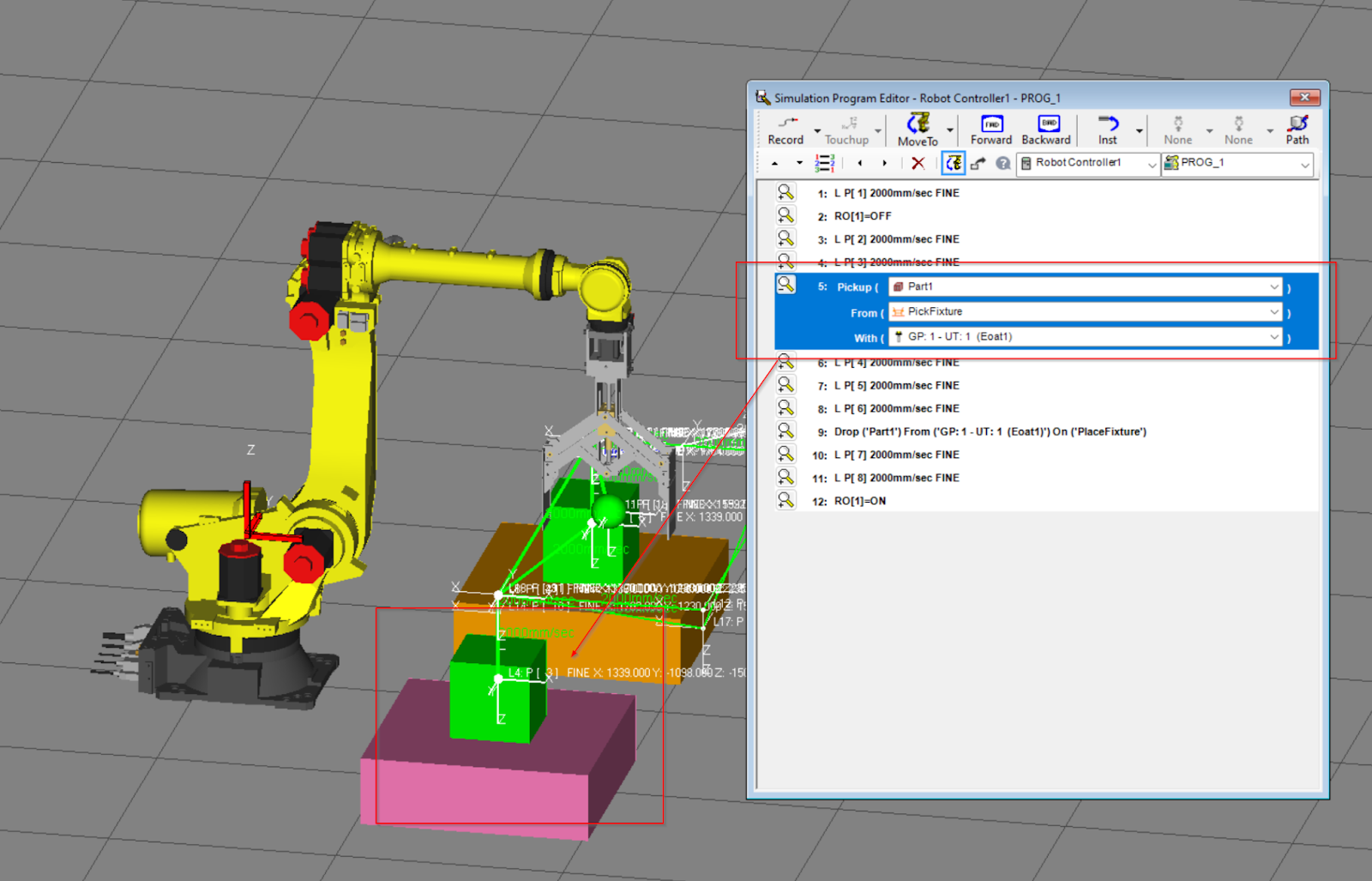
こちらはPick コマンドを使用するときの設定です。
こちらはDrop コマンドを使用するときの設定です。
Result
シミュレーションプログラムの結果は下記の動画で確認できます。
Implementation2
先ほどのセルを流用し、2台目のロボットを作りましょう。
ADD Robot
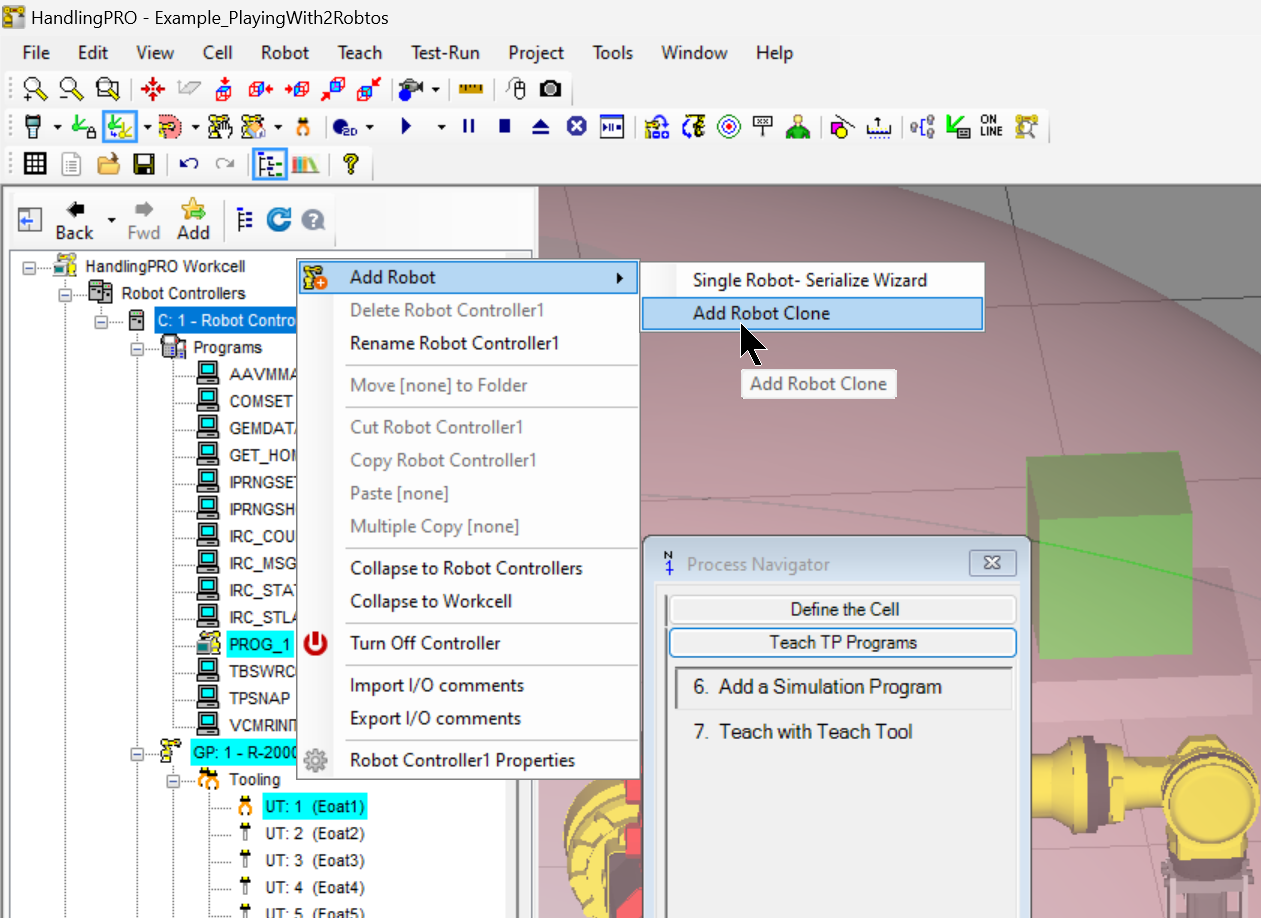
セルに2台目のロボットを追加するため、Robot Controller>右クリック>Add Robot>Add Robot Cloneをクリックします。
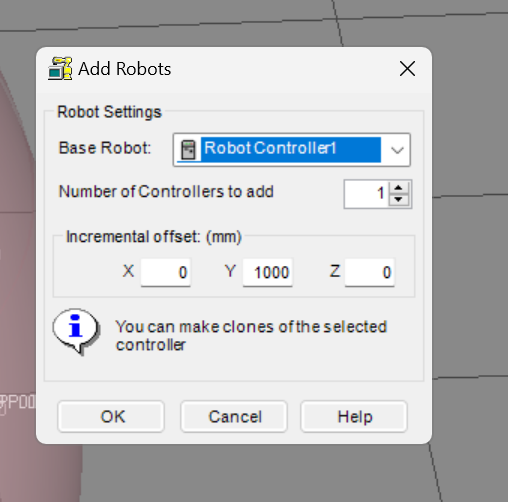
Base RootでControllerを設定し、OKで進みましょう。
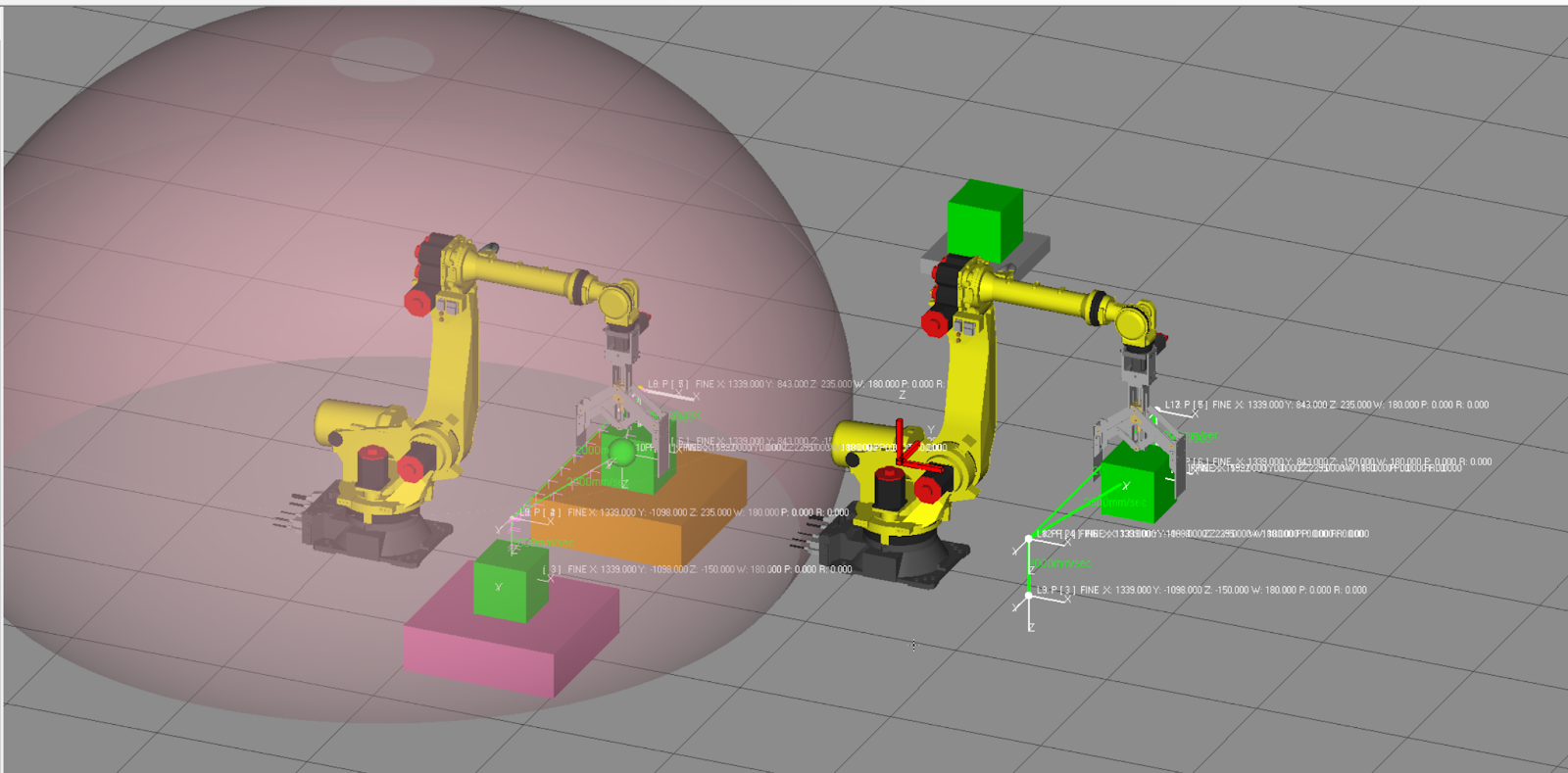
Done!ロボットが追加されました。
Configure Robot
次は2台目のロボットを1台目のロボットの向こう側に置きます。
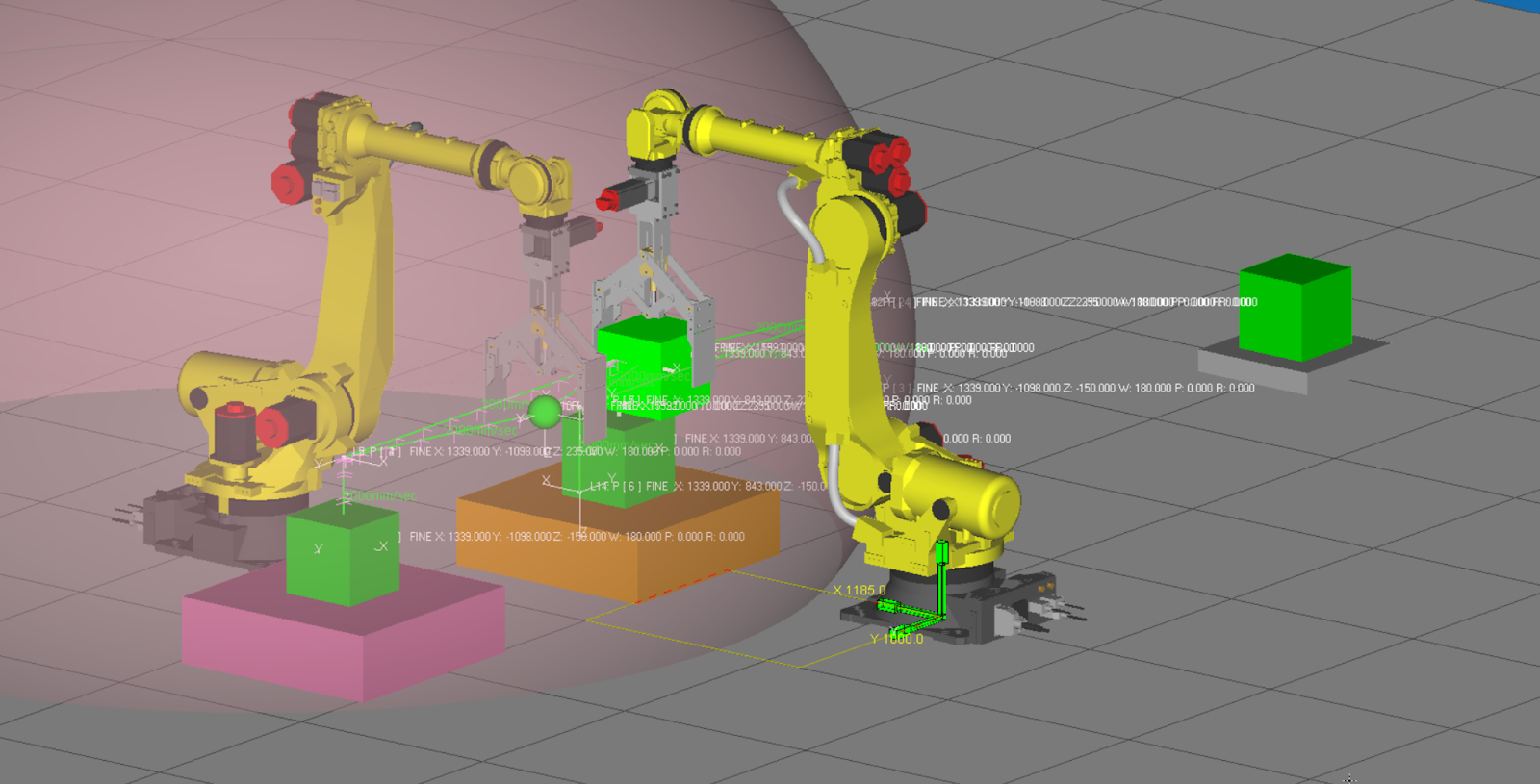
2台目のロボットの置き場所を可動範囲にも確認しましょう。
Configure Tools
次はEdit End of Arm Toolingでツールを設定します。
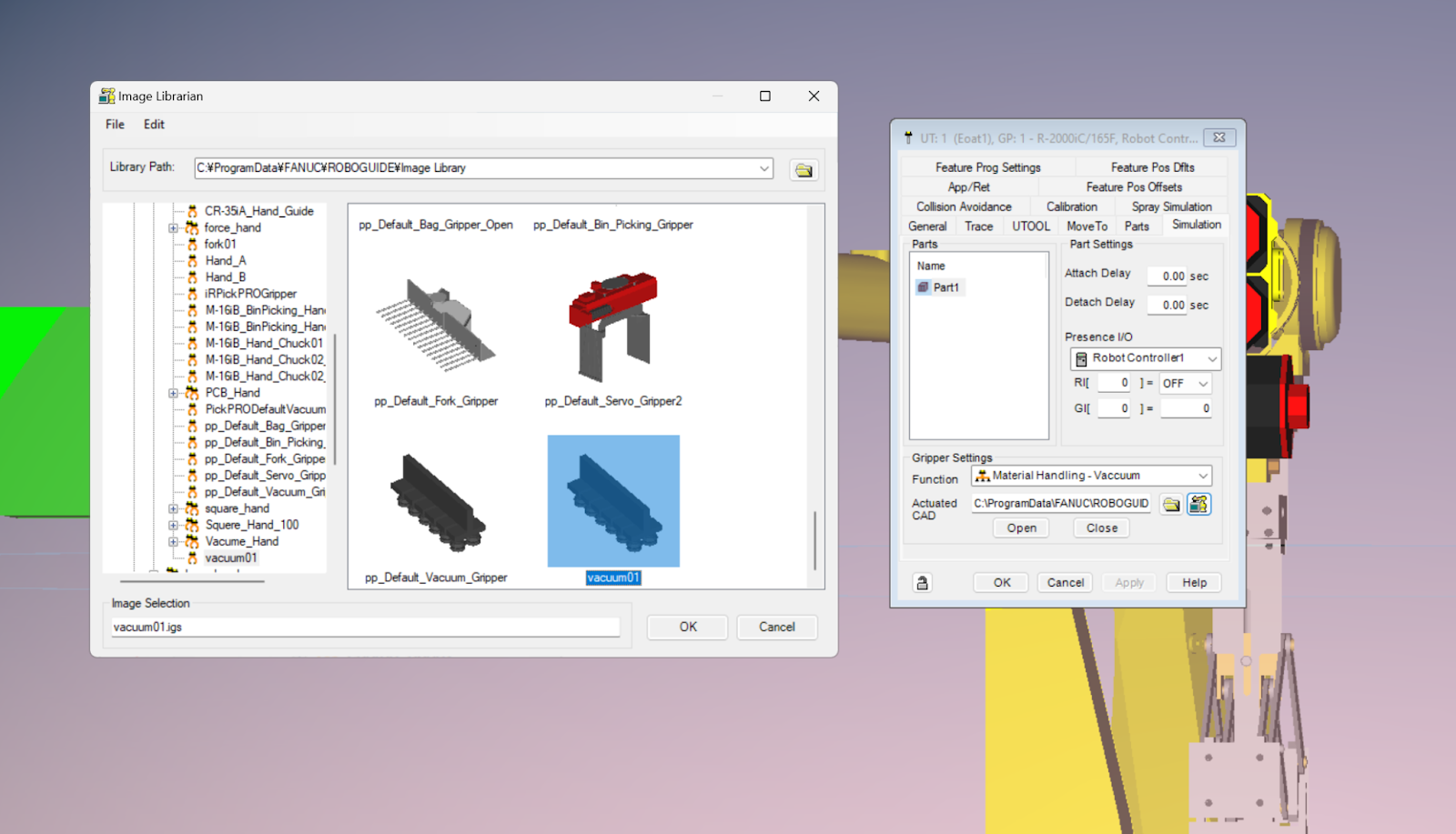
GeneralのTabからツールのCAD Fileを設定します。
Example2ではFANUC RoboGuideのライブラリにある吸着ツールを使用します。
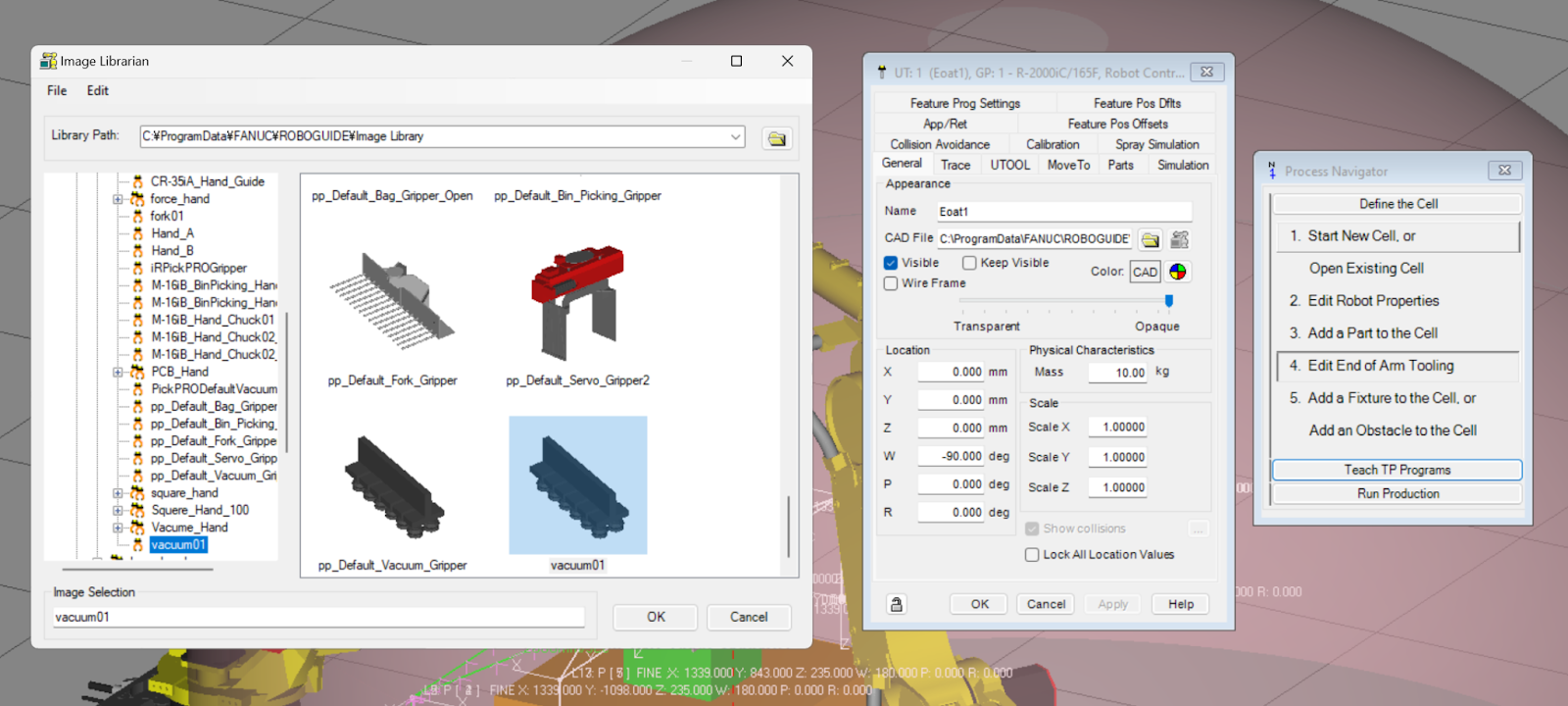
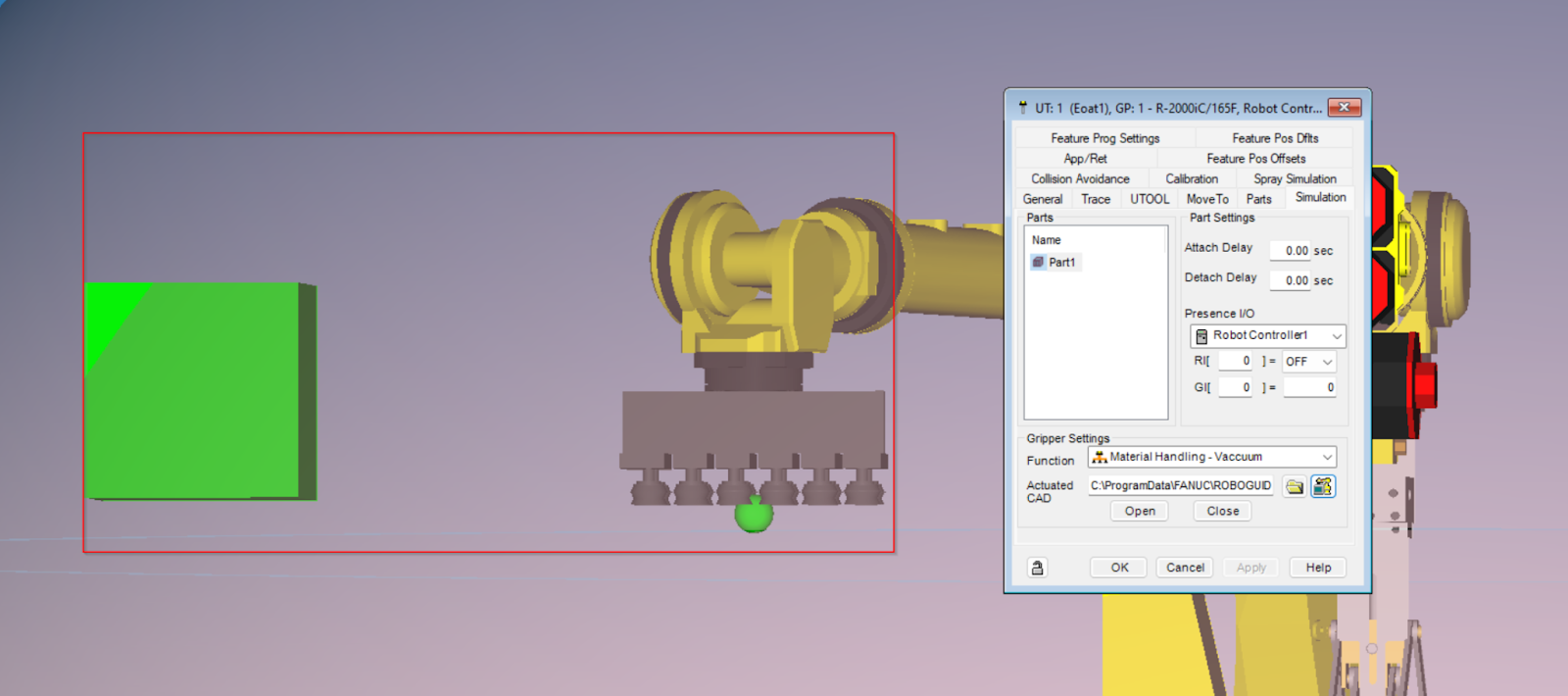
Done!ツールが追加されました。
ツールの方向を調整します。
TCPも含めて適切に調整しましょう。
Done!TCPは大体こんな位置ですね。
Gripper Setting>FunctionでVaccumを設定します。

もちろん、吸着ツールがクロスの状態のCAD Fileを設定する必要もあります。
先ほどと同じ吸着ツールを設定していただければOkです。
次は吸着ツールがPartsを吸着するときの位置を調整しましょう。
大体はこんな位置です。
よし、吸着ツールON/OFFの動作確認もできました。
IO
次はIO設定を行います。2つのロボットのプログラムを同時に実行しますので、もちろんロボット2がPartsを置台1から置台2に置き、なおかつロボット1が退避してからロボット2をPartsに吸着する必要があります。
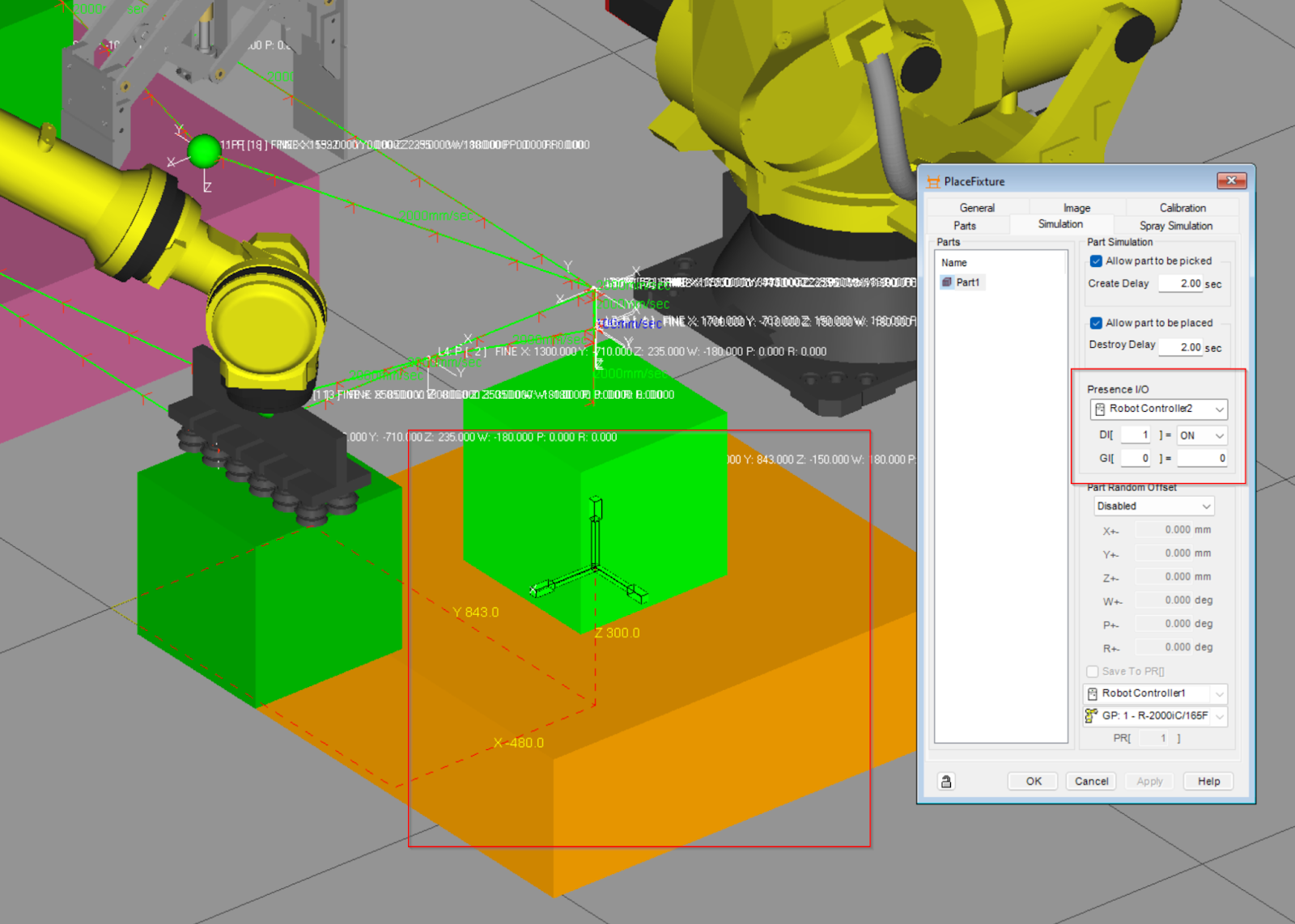
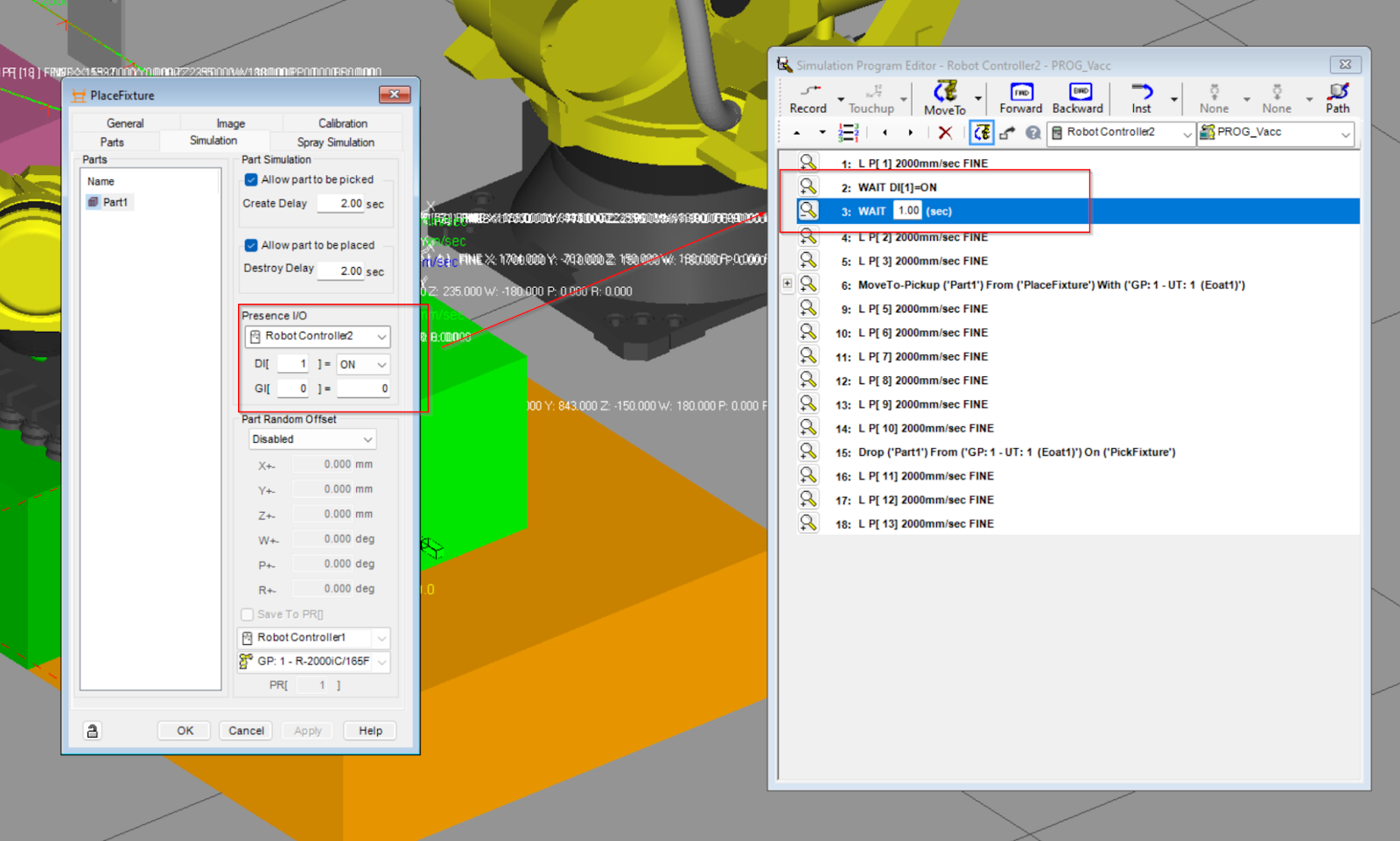
ロボット2が取りに行くための置台をクリックし、Presence I/Oに2台目のRobot Controllerを選び>DI[1]=ONに設定します。その設定により、Partsが置台においたらDI1=Trueになります。ロボット2がそのDI信号を利用すればロボット1の干渉を避けられます。
ADD Simulation Program
ロボット2にもSimulationプログラムを追加します。

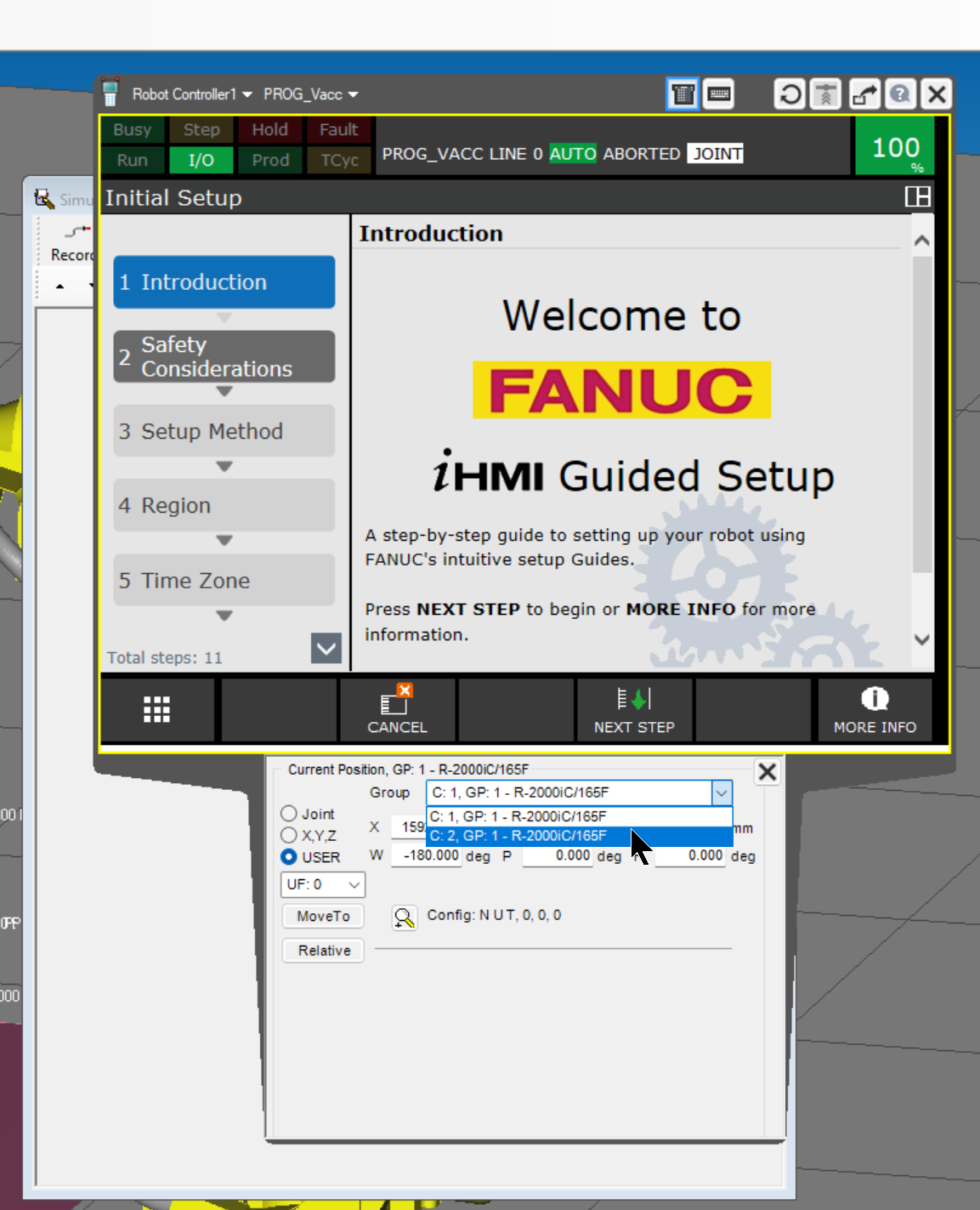
その前にロボット2の安全な待機位置も設定したいので、Teaching ペンダントを起動し、ロボット2を適切な場所まで退避しましょう。
Done!

こちらはロボット2のプログラムです。詳しく説明しませんが、ロボット2が置台2にあるPartsを取って置台1に置くという簡単な動きを実装するプログラムです。
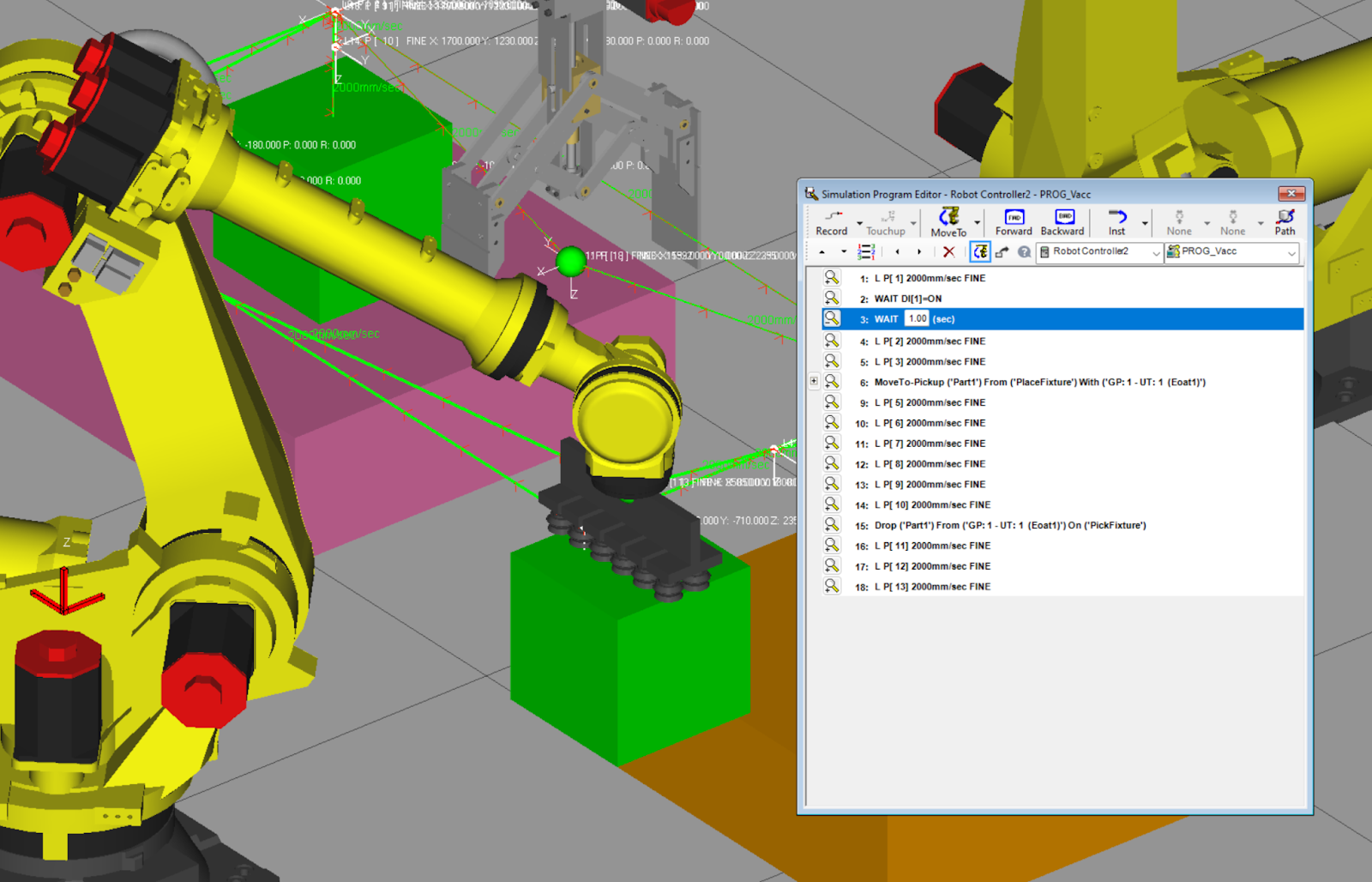
注意するのはLine2にあるWait DIコマンドとLine3にあるWAIT時間コマンドです。こちらは置台にあるPartsが置いた信号を1秒を待つの動作を示しています。
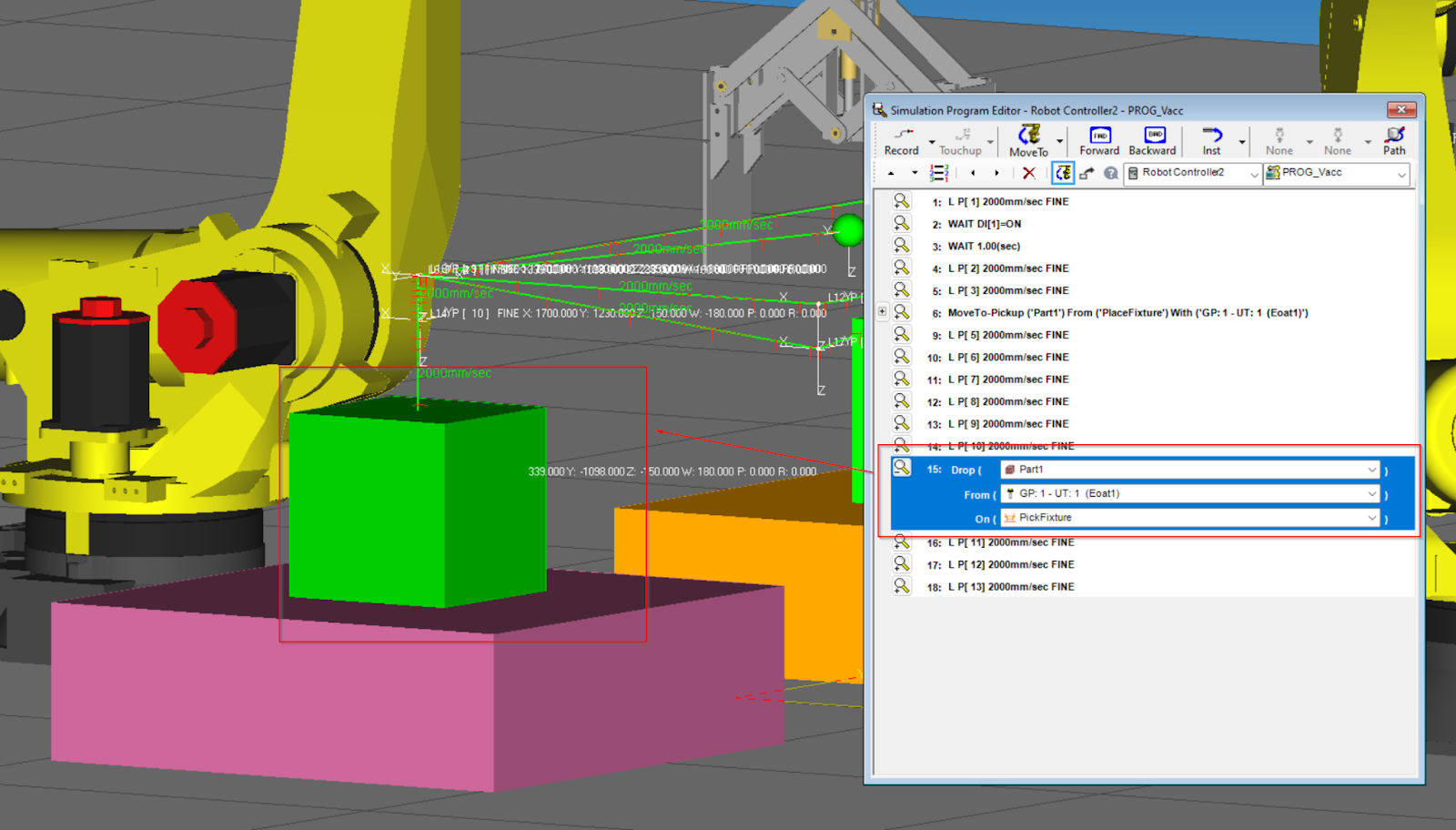
また、ロボット2が置台2からPartsを取るとき、Pickupコマンドに関するFixtureやPart設定を確認してください。

同じくPlaceコマンドの設定にも。
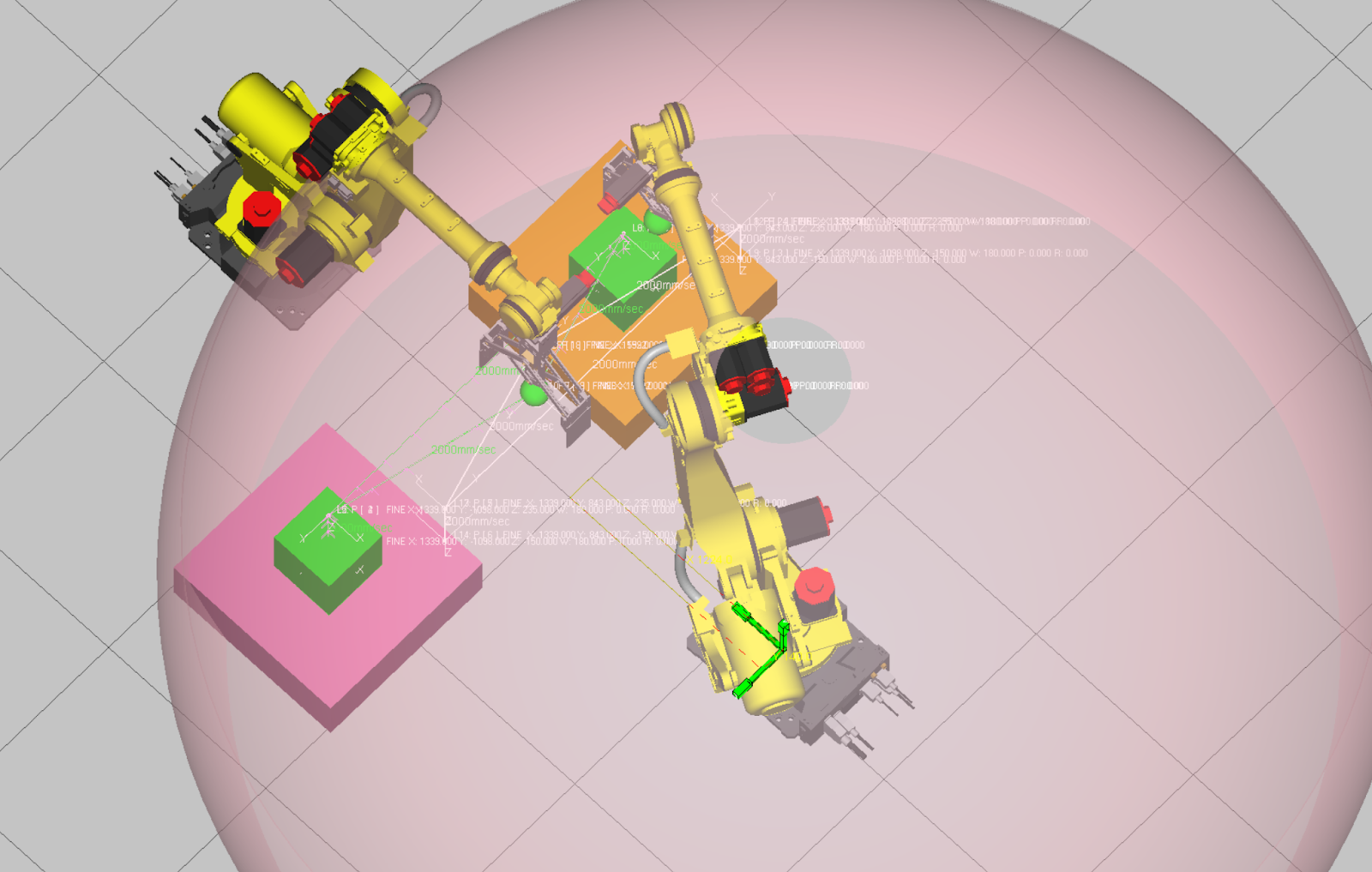
Result
結果は以下の動画で確認できます。