RoboDK#Install in ubuntu
RoboDKはWindowだけではなくUbuntuやRaspberry-piでも作業することができます。今回はUbuntuにインストールす...
RoboDKはWindowだけではなくUbuntuやRaspberry-piでも作業することができます。今回はUbuntuにインストールす...
最初に言っておきたいのは自分も機械学習やロボットやVisionについてまったく初心者で、大学も出てない自分が差を少し少なくしようと日々勉強...
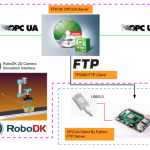
この記事ではRoboDKからOPCUA Client立ち上げ、TwinCATにあるOPCUA Serverと通信し、コマンド値によって違う...
みなさんこんにちは。この記事ではRoboDK 2D Camera Interfaceの使い方やPythonからのControl方法について...

みなさんこんにちは。このシリーズはBeckhoff TwinCAT3のTF7xxx Visionライブラリのメモになります。きっかけはいま...
みんなさんこんにちわ。 今回はRoboDKを使用しPick and Placeのアプリケーションを作成しようと思います。 この記事の...
みんなさん、こんにちわ。今回はもう少しRoboDKのReference Frameについて話ししたいと思います。Frameの説明するにはR...
みんなさんこんにちわ。FANUC初心者勉強の6話になります。前回Partsの追加・設定・Worldの思想などを簡単に説明しました。次はTe...
まずRoboDK LibraryからCubeを追加してみましょう。それは今回のFrame説明するために使われています。 前回...
みんなさんこんにちわ。RoboDK第3話です。前回はRoboDKの簡単操作について簡単に説明しました。今回は実際ロボットプログラムを作成し...