みんなさんこんにちわ。FANUC初心者勉強の第4話になります。前回はFixturesの追加や設定などを簡単に説明しました。次はPartsを追加しようとそのSimlationの設定すると考えています。

こちらは前回の記事になります:
Fixtures?Parts?
前の記事にも説明しましたが、
ROBOGUIDEの世界ではロボットをプログラムする前に、まずロボットになにか取れるもの、取れないもの、持っていく場所、置かれる場所を教える必要があります。ここでゲームの話にしましょう。
マリオを遊んでたことある方が多いだと思います。マリオがジャンプでき、色々な箱からきのこやコインを貰えることできます。?マックの箱の下にジャンプしたらコインもらえる、レンカならなにもない、なにもないところに落ちたら死んちゃう、雲にジャンプしてもなにもない…など様々なルールがゲームエンジニア決まっています。
ROBOGUIDEの世界では、あなたがそのルールを決める人です。
”あるもの、ROBOTが取り出しや移動できる”のはPartsです。
”あるもの、ROBOTが取り出しや移動できない”のはFixturesです。
英語の意味そのままですね。

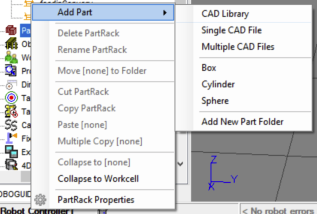
Parts追加
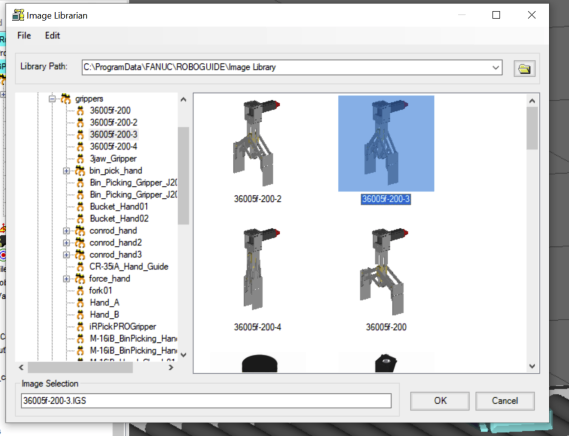
Parts>CAD Libraryします。
今回は小さいな車Partsにしましょう。

追加されたところ、パーツはまぁまぁ大きいですね。
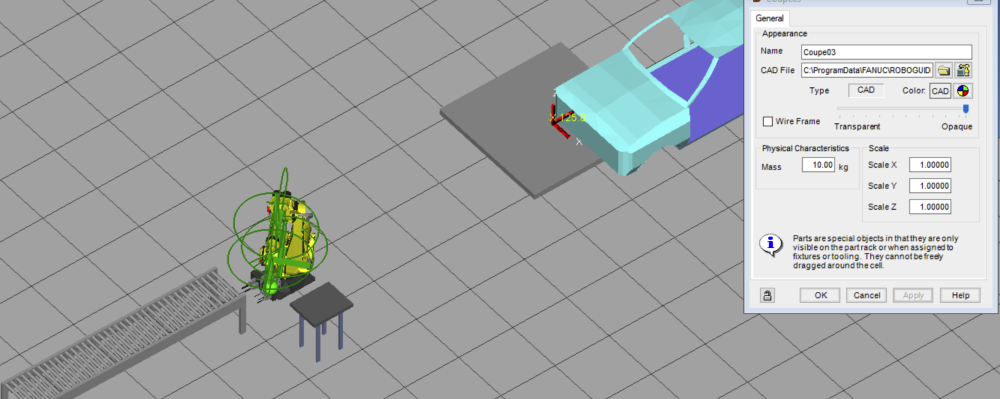
Scaleを0.1に、1/10にしましょう。

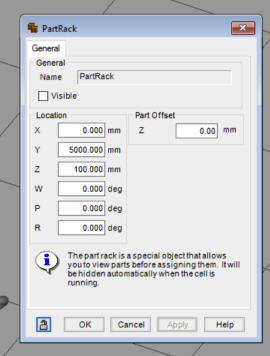
PartRackもいらないです。今回ロボットが直接掴むので。

よし、こんな感じでOKです。
FixturesにParts追加
作業の流れはRobotがコンベヤの上にあるPartsを取ってTableに置くのイメージなので、まずはConvey上でPartsを追加し、Tableの上にPartsを消すようにしましょう。
Convey
Conveyを選んで、PartsのTabを開きます。

先追加した車のPartの隣Checkboxを入れます。

Conveyの上に車のPartsが見えるようになります。ロボットがコンベヤからParts取りたいからここであるのは当たり前ですね。

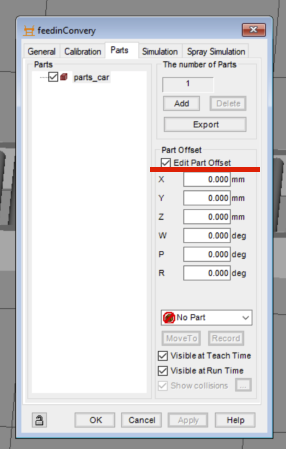
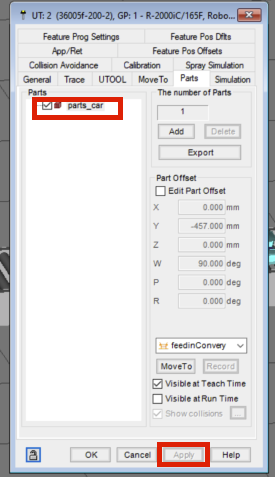
Conveyをもう一度をダブルクリックし>PartsをTabを開きます。
Edit Part OffsetのCheckbox入れます。
それでPartsの位置調整ができます。
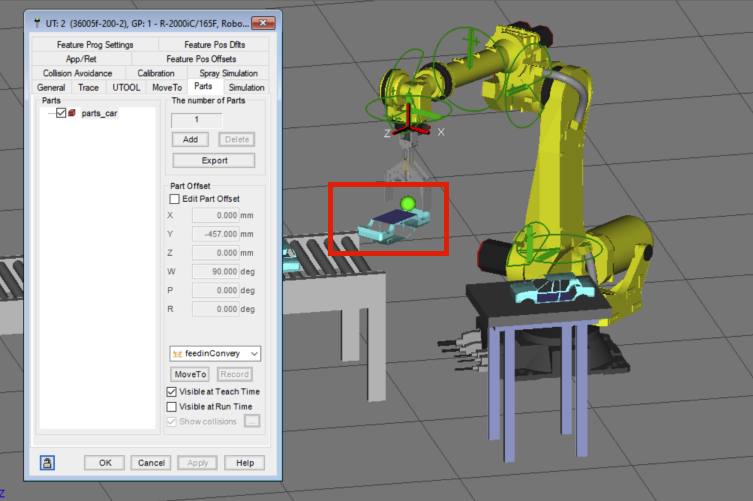
こんな感じですね!

最後は2つの大事なCheckboxがあります。
Visible at Teach TimeとVisible at Run Timeです。

Visible at Teach Time
つまりいまプログラムを作成してるとき。Parts見えないとなにもできないので、Checkbox入れましょう。
Visible at Run Time
ROBOGUIDEでPLAYボタンをおしてシミュレーション始まるとき。
では、シミュレーションのときはこのPartsが該当するFixturesにあるべきかどうかを間g萎える必要がありますね。いまコンベヤの上にあるPartsがロボットにPickされたいので、もちろんシミュレーション上でもみえる様になりたいです。なのでCheckBoxいれてください。
最後はSimulationのTabを開きます。
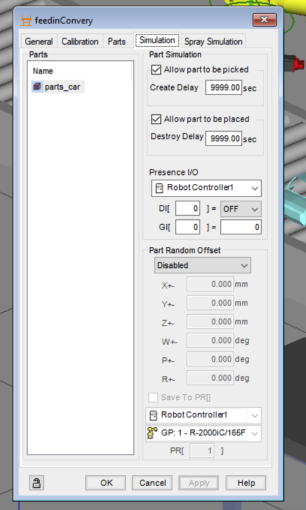
このTabにも大事な設定が2つがありますね。
Allow part to be picked・Create DelayとAllow part to be placed・Destroy Delayですね。
Allow part to be picked
該当するPartがロボットがとってよいかどうかを設定します。もちろんInfeedコンベヤですからとって欲しいですね。
Create Delay
Pickされてから何秒後に新しいPartsを生成する設定です。(s)
Allow part to be placed
該当するPartがロボットが置いてよかどうかを設定します。Infeedコンベヤだからここにおきたくないんですね。
Destroy Delay
Placeされてから何秒後に消えるの設定です。(s)
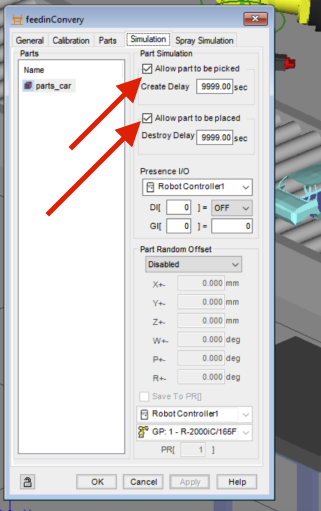
なので、Infeedコンベヤの設定はこうになります。
まずAllow part to be pickedだけのCheckbox入れます。

そしてCreate Delayを4秒にしましょう。

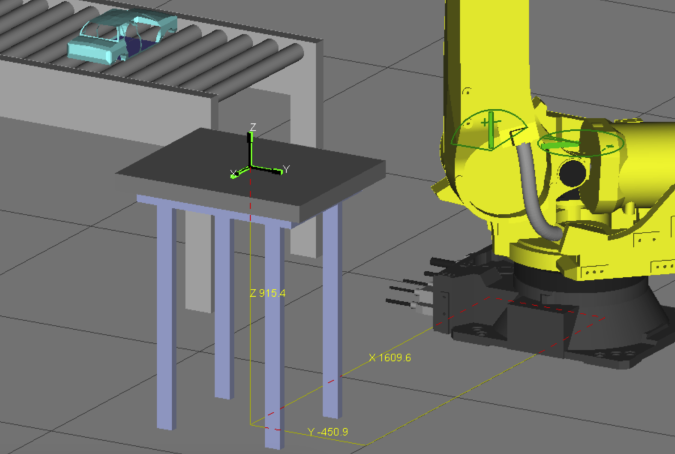
Table
コンベヤ設定終わったところ、次は置き台のテーブルですね。
Fixtures>追加されたTableをクリックします。

TableをクリックしPartsのTabを開きます。

Visible at RunTimeのCheckboxを外します。シミュレーション始めたら最初からPartがすでに置き台にあるとRobotが置けなくなりますので。

次はSimulationのTab開きます。
Allow part to be picked のCheckboxを外し、Destory Delayも4秒にしましょう。

よし、これでOKですね。
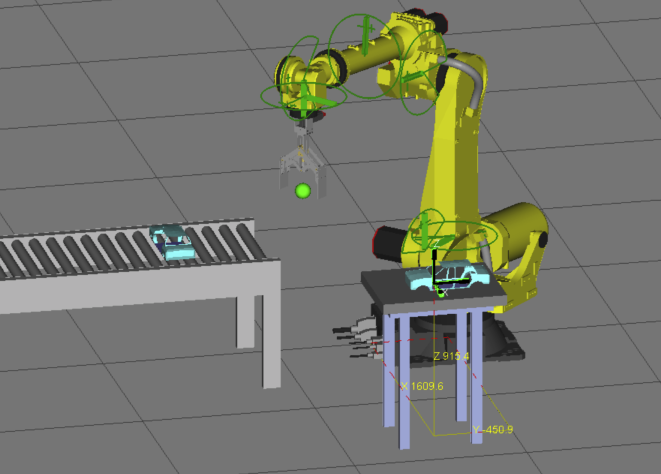
Tools設定
ロボットがPartsをどう掴むかを設定します。
Robot ControllerX>Robot>Tooling>Your Toolにクリックします。
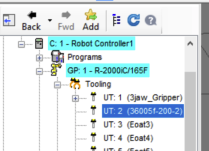
Parts Tabを開き、車PartsのCheckboxを入れ、Applyします。
そうするとロボットのToolにPartsが表示されます。
同じくPartsのTabからEdit Part OffsetのCheckbox入れ、PartsをToolsの真ん中?くらいに調整しましょう。

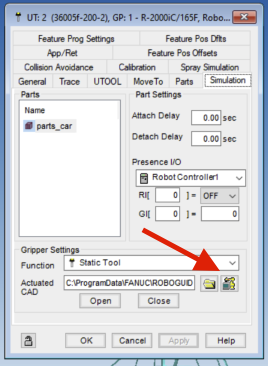
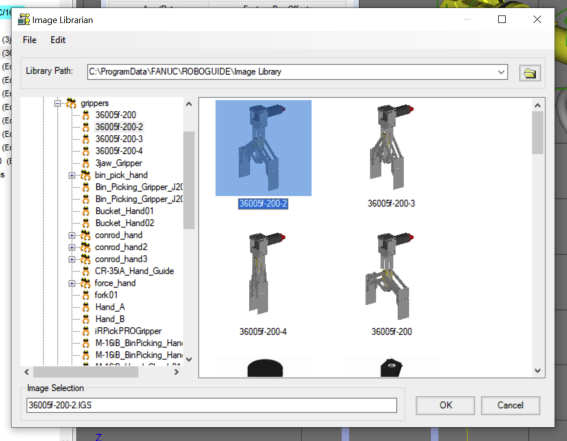
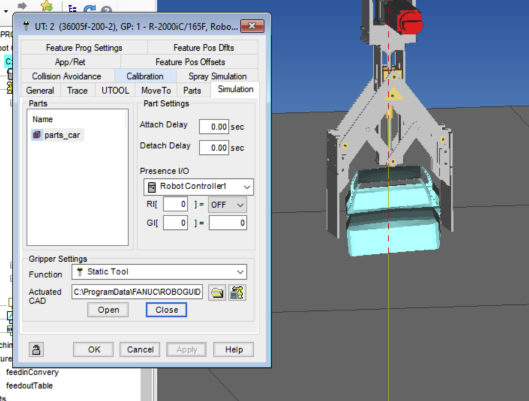
次はGripperの開き状態と閉じ状態のSimulationを設定します。
となりのSimulation Tabを開きます。

CAD Libraryや自分が書いてたCAD をImportします。
うんーそのちょっと閉じてるのGripperがいいですね。
次はGeneralのTabを開き、CAD FileはOKかどうかもう一度確認しましょう。

うんーその開き方はいい感じですね!!
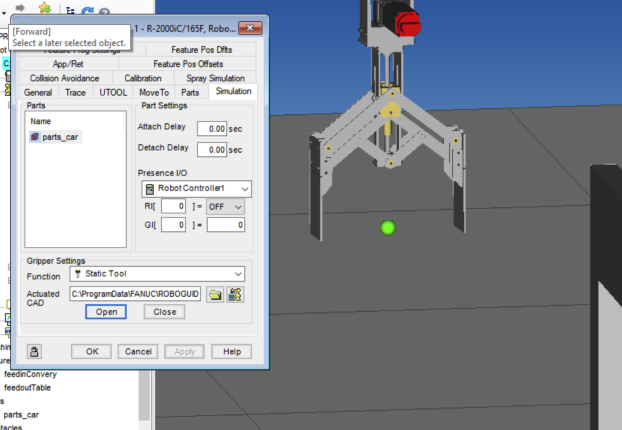
そして状態を確認するため、もう一度Simulation Tabを開きます。
Closeボタンを押すと掴んでいますね。
Openを押すと開く状態になります。
最後
はーい、お疲れ様ーです。
今回はPartsの追加とGripperの設定など説明しました。次回はTeaching PendantをTeachingしたりをしたいと考えています。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。
