こんにちわ、RoboDKの第2話です。今回はRoboDKの簡単操作について説明します。
この記事ではあなたはどうやってMouseからロボット動くことができるか、どうやってツールを追加するか、など基本的なものが中心になります。
こちらは第1話です。
では、まずURロボットを追加しますね。

Move
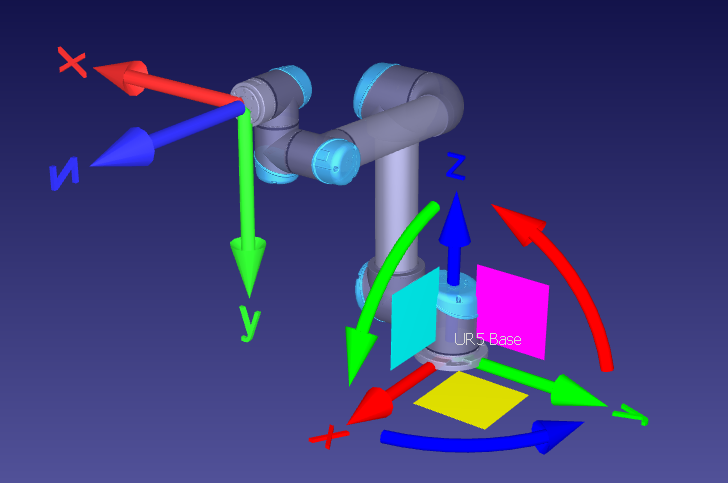
赤枠のMove reference frame ..をクリックします。

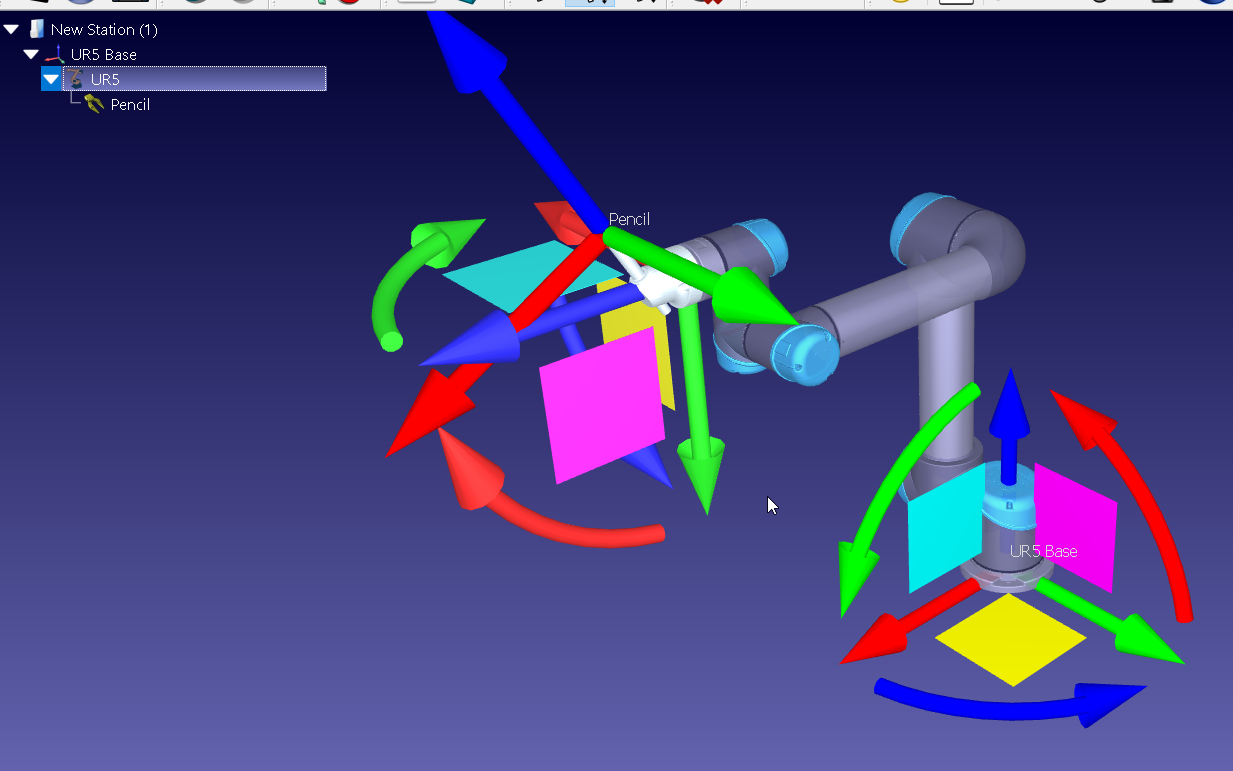
そしてよく見られるXYZの座標が見えますね。
Tool FrameのYの矢印を押しながらMouseを右左ひっばるとロボットもこのよう沿って動きます。
もちろん回転もできます。

みんなはXとZの間・YとZの間・XとYの間にも四角形があると気が付きましたか?この四角を押しながらMouseを引っ貼りますと、RobotがTool FrameのXやY方向を移動することができるってことです。
Tool追加
RoboDKのライブラリWEBをアクセスし、TypeをTool選択します。

PencilをDownloadします。(もちろん別のToolsでもOKです。)
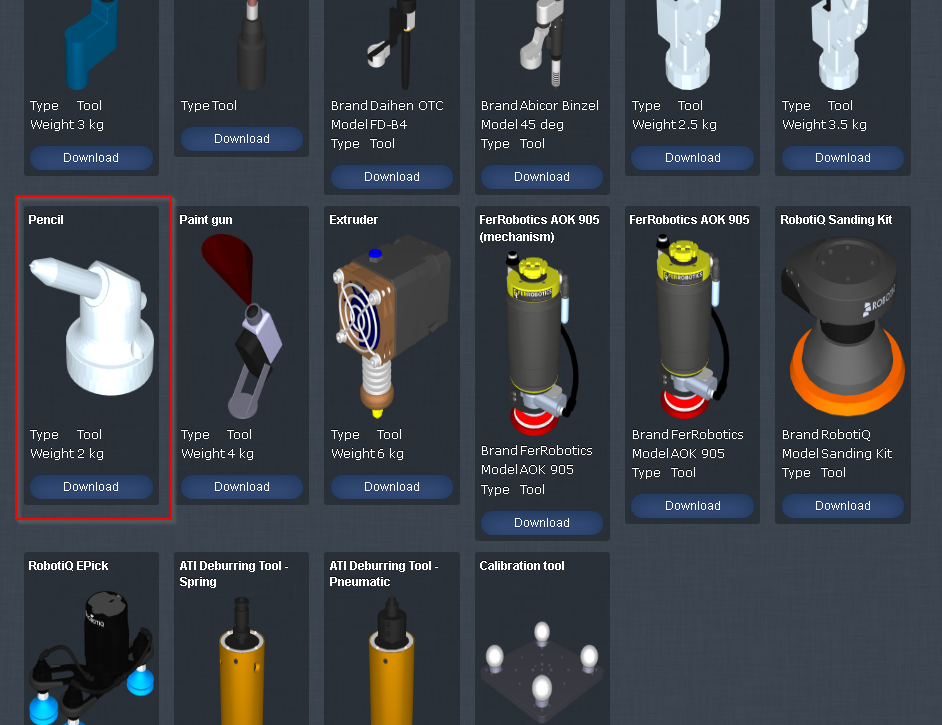
このような.toolのFileがDownloadされました。
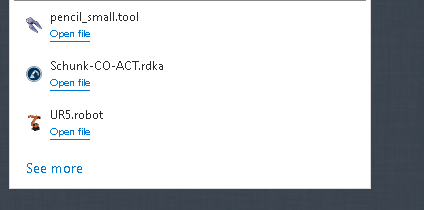
次はRobotを右クリックし>Add Tool(TCP) from file..をクリックします。

先DownloadしたToolを選び、Openします。
こうすると、Toolが自動的ロボットの先端に取り付けられました。
Visible
ツールの方を右クリックしツールを非表示することができます。
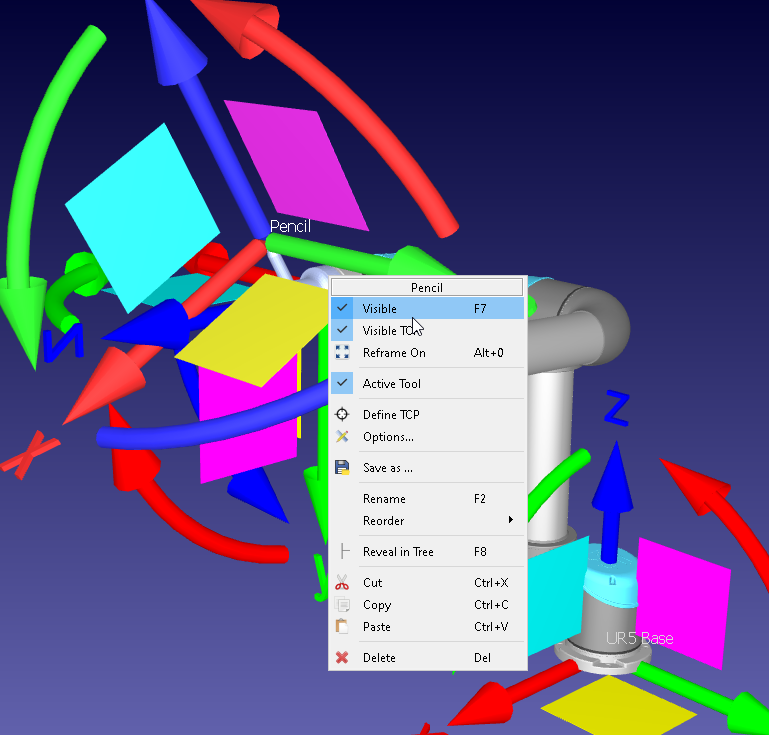
そうするとツールが消えましたね。(消したわけではなく)
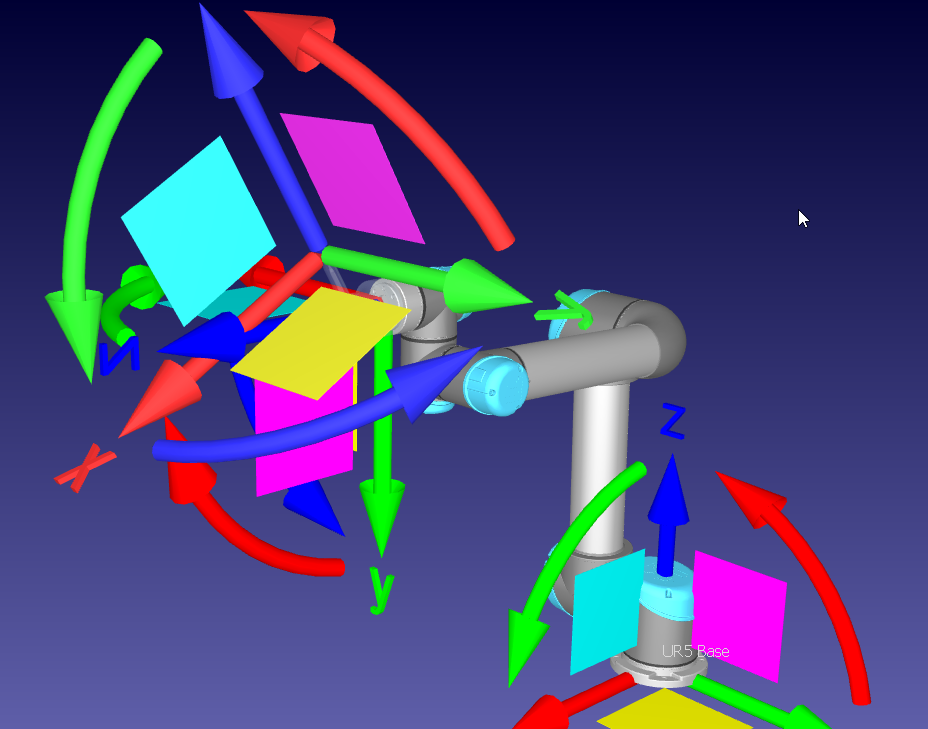
そしてVisible Robot Flangeをクリックしますと、Tool Frameも非表示になります。

このようになりますね。
Panel
ロボットをダブルクリックすると、右側にPanelが出てきます。
このPanelからにもロボットの操作が可能です。
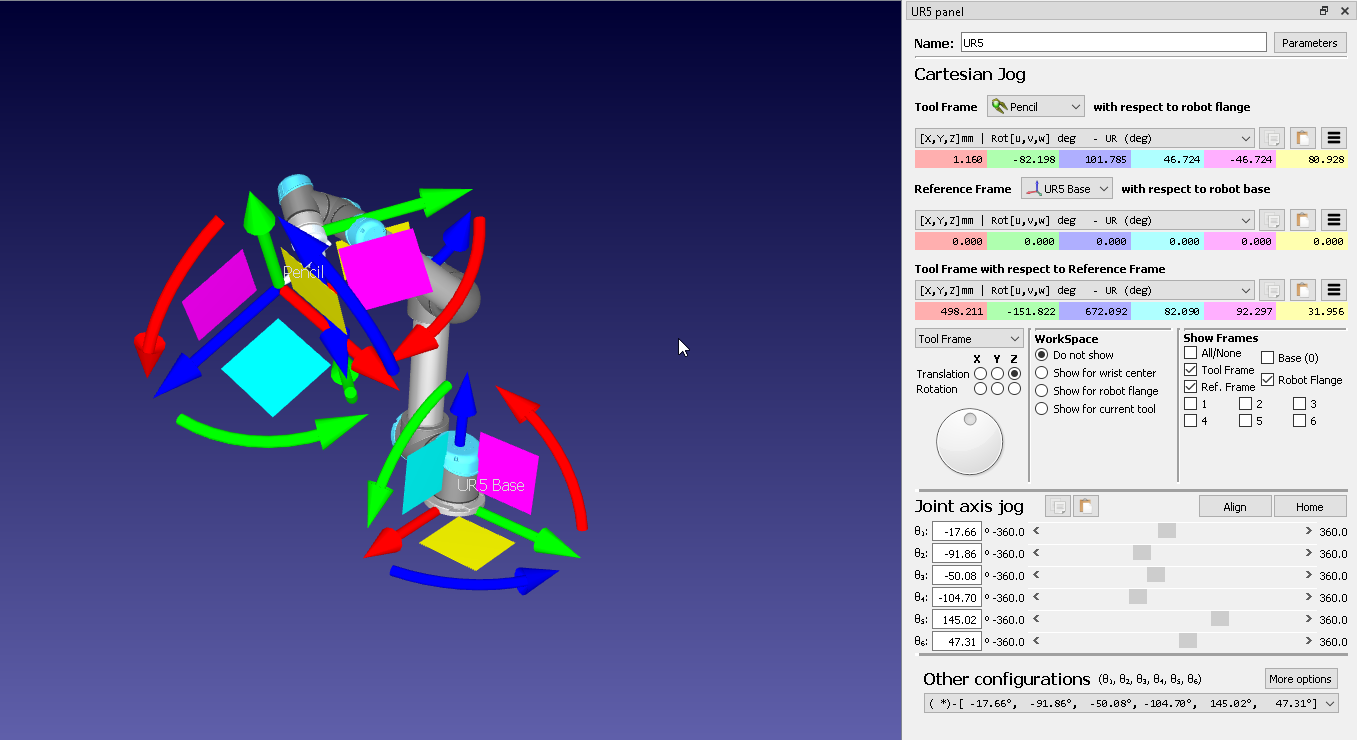
Joint axis jog
例えばJoint Axis jogはJoint Modeで、各軸を動作することが可能です。

このようなイメージになります。
Frame
そしてFrameを選び動くこともできます。

Align
次はJoint axis jogのPanelエリアにAlignのボタンをクリックします。
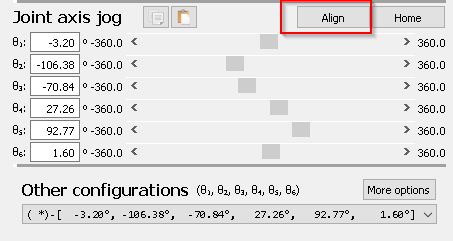
そしてTool Frameを移動したら、XやYやZだけをMoveするようになりますね。

Mouse
次はMouseからも簡単操作を説明します。
まずMouseの真ん中ボタンを押しながら移動します。
そうするとRobotのViewがそのままソフトできます。
次はMouseの右ボタンをクリックしながら移動します。
そうするとRobotのViewを回転できます。

View Change
この四角Objectを押すと画面がViewの方向を変わることができます。
下のように上から右から左からなど、です。
Fix View
プログラムを作成すると共に、どんどんViewは変な方向行ってしまう場合もありますね。のときにFix Viewボタンを押すと画面上でロボットが見えるのようにViewを戻してくれます。
このようですね。
Workspace
次はRobotをダブルクリックしますと右側にControl Panelにあります。
まずWork Spaceを見てみます。

このようにFANUCのRoboGuideにもある一般の機能でRobotが動ける範囲を表示することができます。

Options
ちなみに、Tools>Optionsを開くとRoboDK環境など全般的な設定することができます。

今回はまずXYZのFrameにXYZの文字を表示するようにします。
Options>Display>Collision color>Display XYZ axis lettersのCheckboxを入れいます。

そうするとFrameにXYZが表示することになりますね。
