Visual Components のTutorial第2話です。今回はロボットの操作・ツール追加・TCP・Action Configurationなど基本の基本を紹介します。
さ、始めよう!
Reference Link
Your Target!
今回のTutorial最後ではみんなも同じようなPick and Place動作をVisual Componetsに作成できるようになります。
Add Robot
まずカタログからロボットをVisual Componetsに追加します。部品の追加方法がわからない方はReference LinkのPart1を参考にしてください。
Operation your Robot
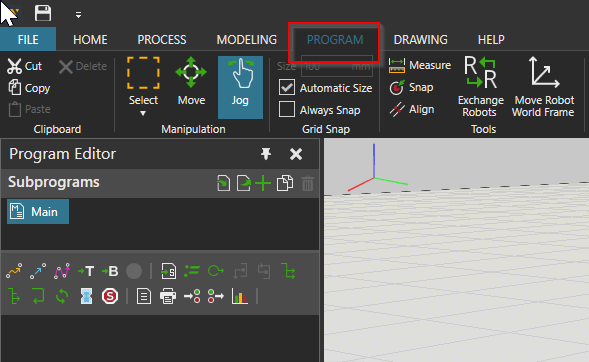
Visual Componentsからロボットプログラムを作成する前、まず基本的なロボット操作を説明します。 PROGRAM TABを開きます。
Operation as Jog
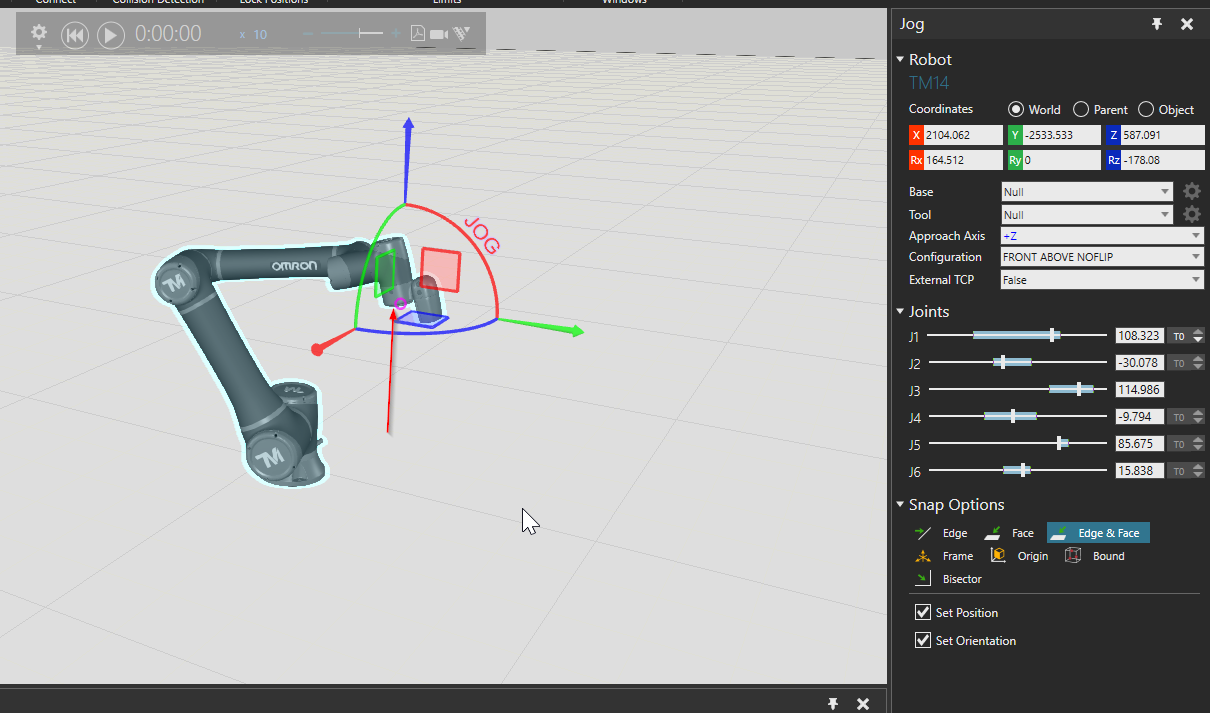
最初はロボットをVisual ComponentsでJOGGING動かしてみます。ロボットをダブルクリックすると右側に操作パネルがあり、Jointsの項目が見えます。

このように直接Slide Barからロボットを動かすことができます。
Operate as Coordinates
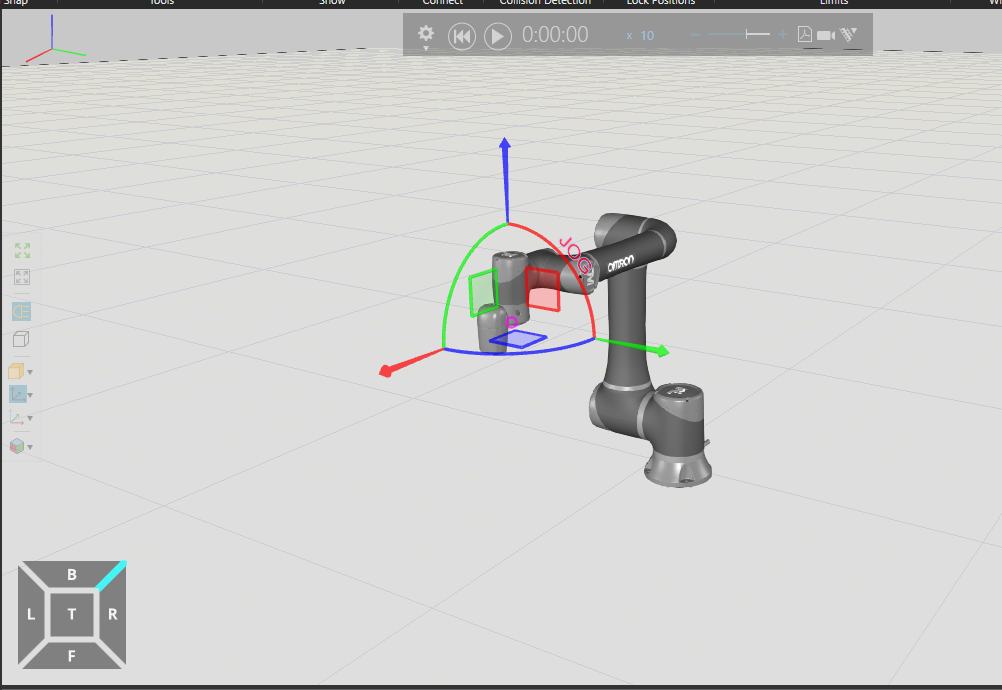
次はTCPに沿って座標系でロボットを動かしてみます。ロボットの先端に座標のICONがあり、XYZの矢印が見えます。
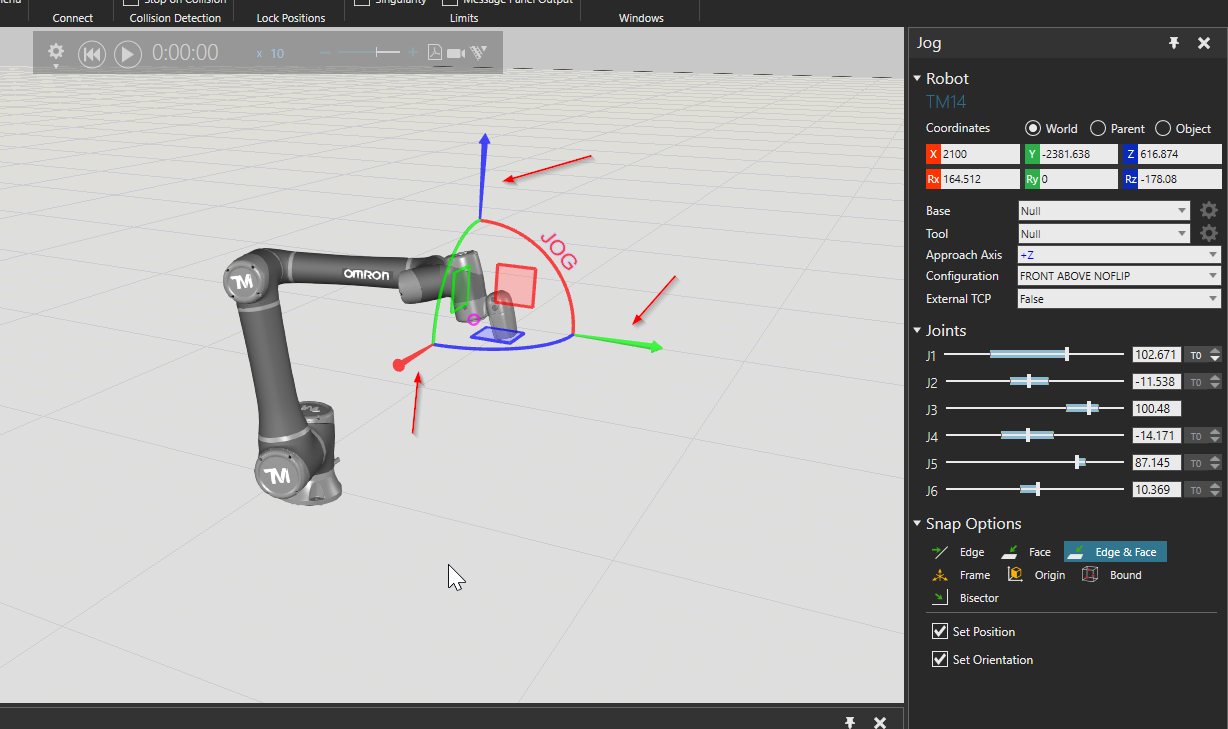
このようにMouseを座標の矢印を押しながら移動することによってロボットがTCPに沿って動きます。
Operate with AnyDirections
実はロボットの先端から小さな丸いICONがあり、このTCP Pointを使用すればもっと自由にロボットを動かせます。
先程の矢印でロボットを操作するよりもっと自由度が大きいです。
Do Some Robot Program
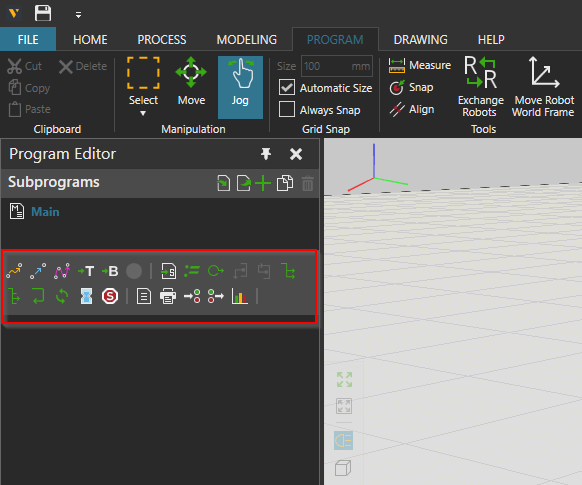
ロボットの基本操作ができたら次はVisual Componentsからロボットプログラムを作成してみましょう。PROGRAMのTABからSubprogramsの項目があり、クリックだけでロボットのTeachingなどの操作が可能です。
最初はLinear Motion Statementを作ってみましょう。
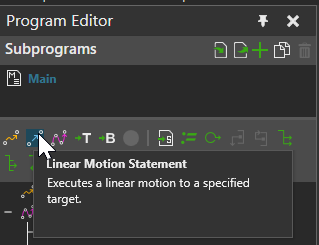
このようにりロボットの現在位置がP1になり、LINはMove Linear、1000m/sの速度のようなロボットコマンドが作成されます。

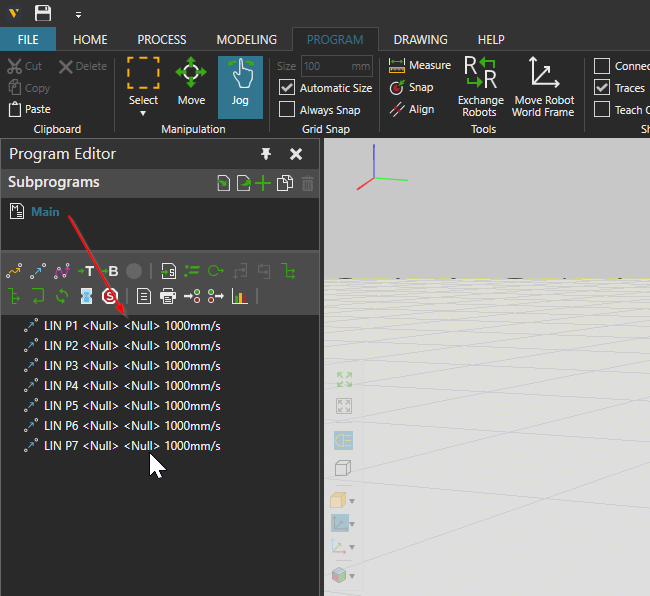
ロボットをいくつかの場用を先程で紹介した操作で動かし、Move Linearのコマンドを作成しましょう。

そしてSubprogramsのところにMainという文字があり、そのMainのプログラムが先程私達が作成したロボットコマンドが入っており、上から下までの順番で実行します。
Play!
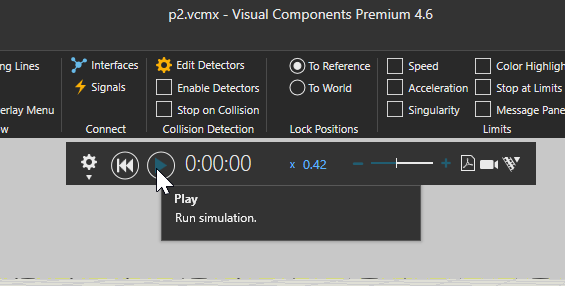
ではPlayボタンでSimulationを実行してみましょう。
Done!Click するだけでロボットプログラムが作りました。

Create a pick and places
基本的なことが理解できればPick and Placesのアプリケーションを作成してみましょう。先のOmronロボットを削除し、今度はABBのロボットを追加します。

Add Tools
Toolを追加します。カタログからRobot Tools>Smart Suction GripperをWork SpaceにDrooしましょう。
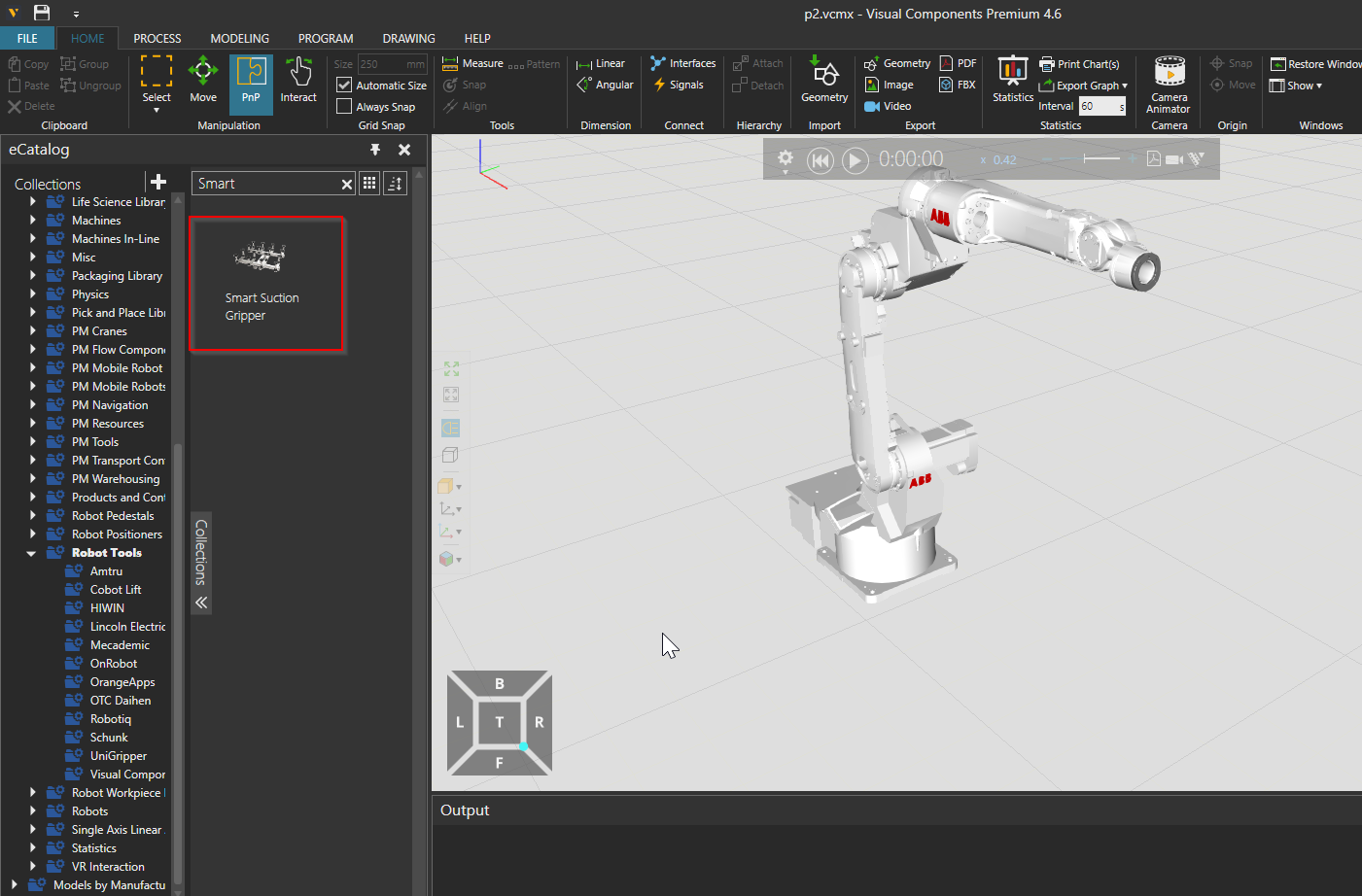
Done!ツールが追加されました。
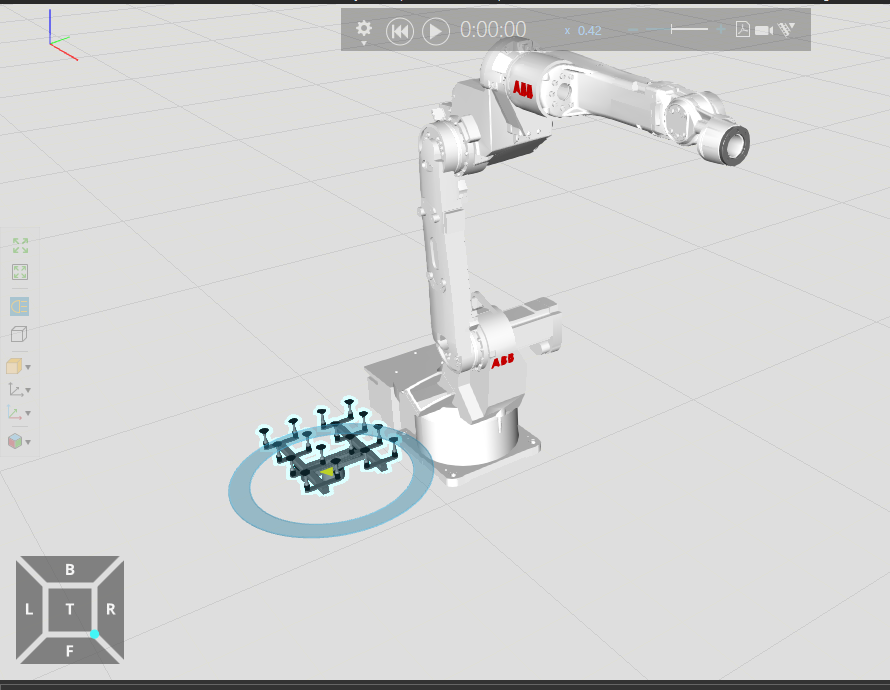
次はPnp Modeでツールをロボットの方に移動します。
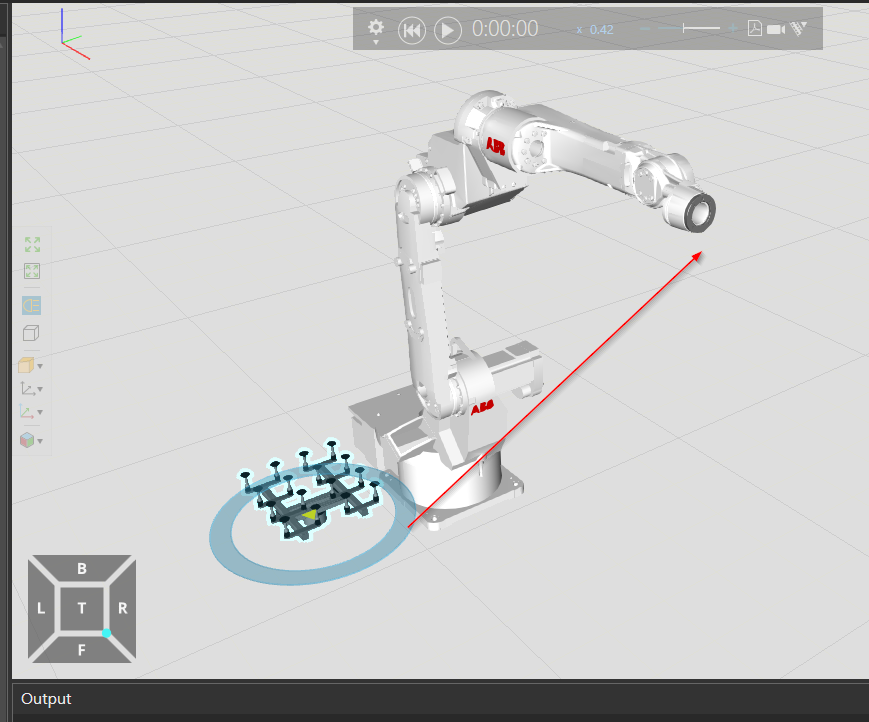
ある程度ツールがロボットに近づくと緑の矢印が表示されます。

このようにツールをロボットに追加して行きましょう。
Add Box
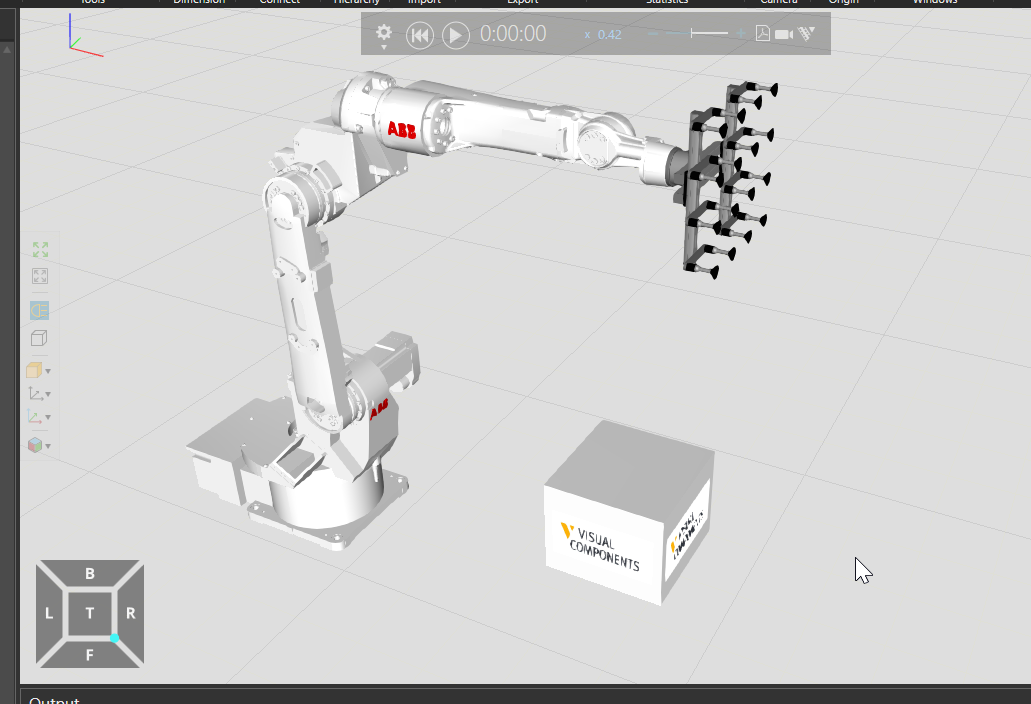
今度はロボットをPickする箱を入れます。BOXを検索し、Visual Components BoxをWork SpaceにDropで追加しましょう。
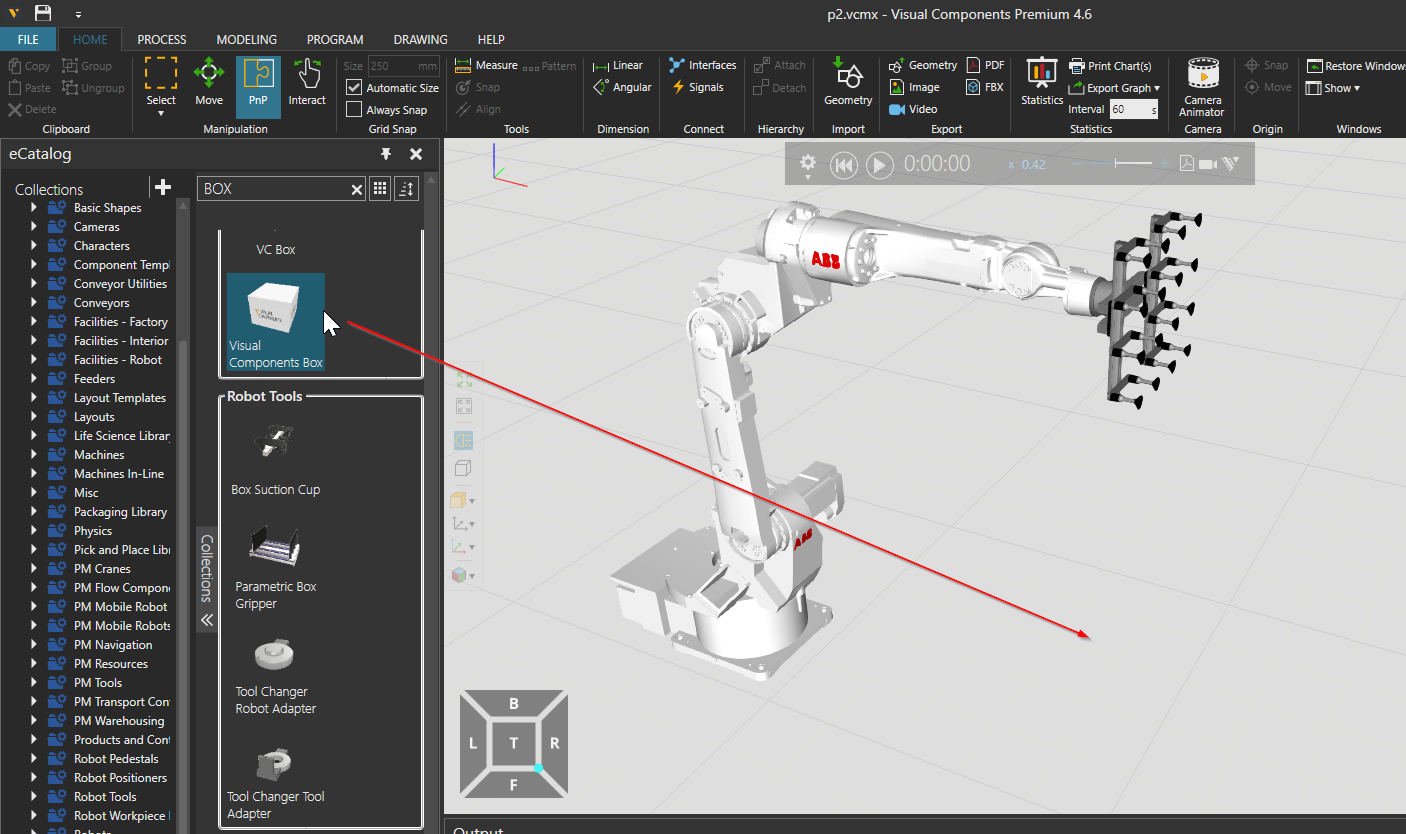
Done!箱が追加されました。
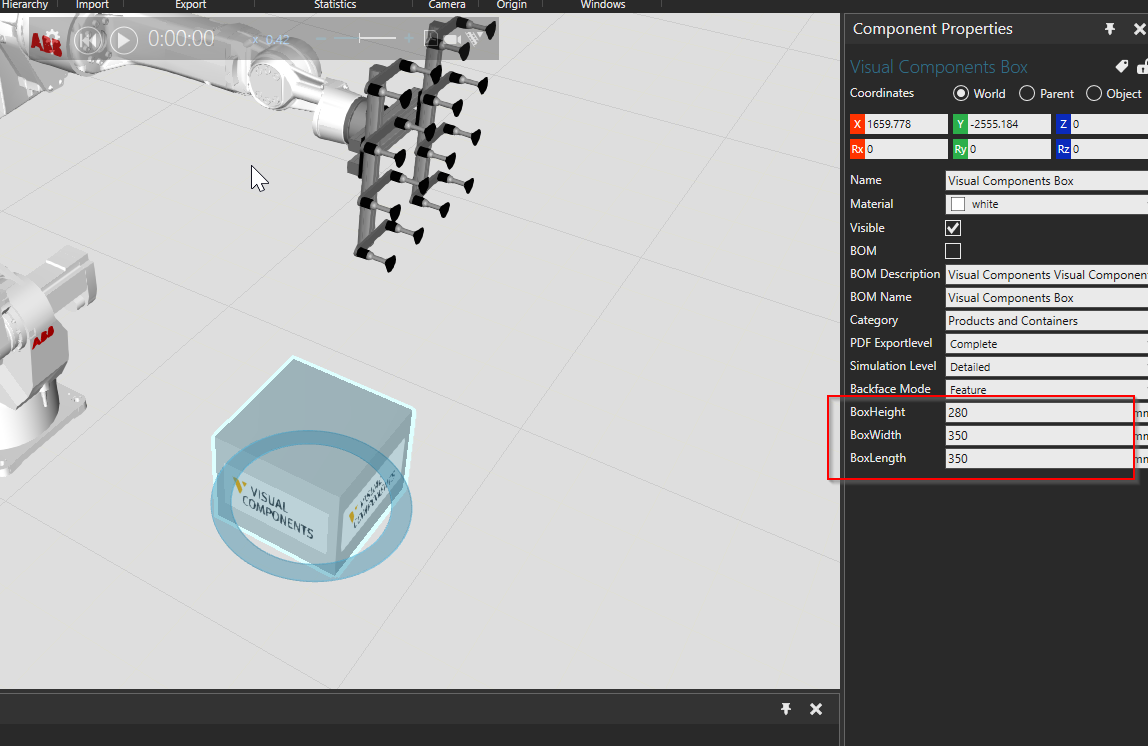
Change size
DefaultでBoxのサイズはちょっと小さいので大きさを調整します。箱をクリックしPropertiesからHWLを調整しましょう。
But Tcp..
でも実際動かしてみるとなんかTCPがあってないと気がしますね。
Change TCP
ツールを追加したのでロボットのTCPはもはや6軸目の先端ではなくツールの先端になります。ロボットをクリックし、Toolの項目ありSelection ListからToolを選択できます。
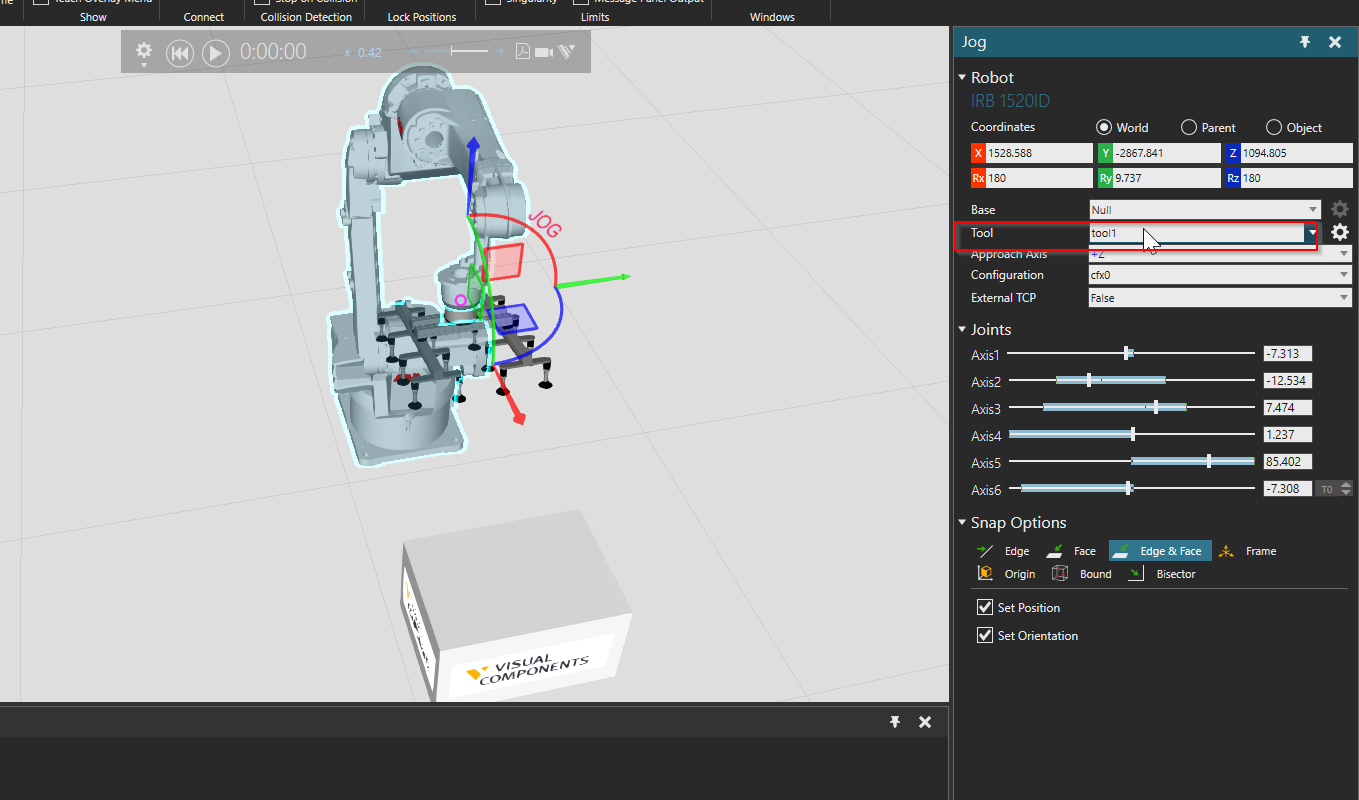
なので、ToolをGripperTcp(つまり先ほど追加しいまロボットに取り付けられているGripper)に変更します。

ツールの先端に拡大してみると小さな青い色の丸いボタンがツールの真ん中にあります。この青い色の丸はいまあなたのロボットのTCPです。

Done!

View
では、実際いま自分のCellにどんな部品やObjectがあるかを一覧するために、Cell GraphというTabがあります。
そのTabから現在のCellにあるすべてのObjectを確認できます。なので、いまCellにロボット・ツール・あと箱1つがあると明確に把握できます。

Test it
ではロボットのPick and PlaceのPointを設定します。

Done!いま第1Stepが完成ました。
Action Configuration
でも先ほどのTestではロボットが箱を持ち上げられなかったです。Visual Componentsではロボットからなにかを移動させるにはConfigurationの設定が必要です。ロボットをクリックしActiosn Configurationの項目を見てみましょう。

Actions Configurationの設定項目を簡単に節目します。
- Outputは1,2,3のように数字を設定することができ、実際ロボットコマンドと連動します。
- On TrueはそのOutputがTrueになった場合に行う動作になります。いまはGraspを設定するとなにを取るという動作になります。
- On FalseはそのOutputがFalseになった場合に行う動作になります。いまはReleaseだと設定されるとロボットが持っているなにかを離すと理解しましょう。
- On TrueがGraspだと設定されたので、Grasp関連の設定が表示されます。
- Grasp
- DetectionVolumeSizeというのはTCPからあるObject(箱でも瓶でもなにでもよい)の距離を示しています。つまりどれくらい近づいたらそのObjectを取っていくかのイメージです。
- Using Toolは使用するツールです。
- Release
- GravityDirectionは離すの方向になります。
- Grasp

Insert Output Statement
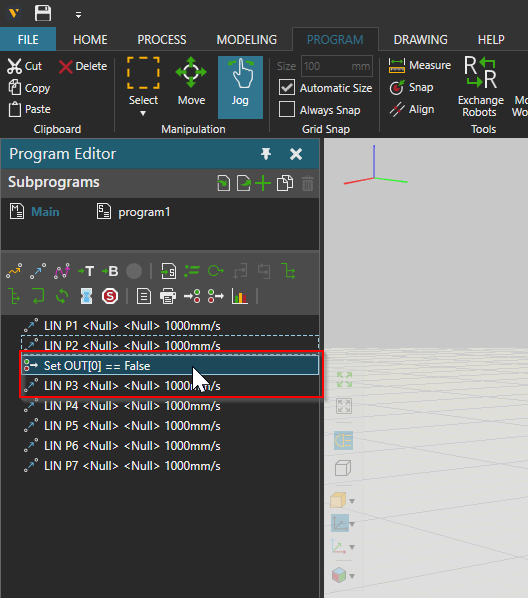
Actions Configurationを説明したら次はロボットが箱を持ち上げたいときOutput=True、リリースするときOutput=Falseのコマンドをロボットプログラムに追加しましょう。
PROGRAM TABにSet Binary Output StatementというICONがあり、クリックすると出力制御コマンドを挿入できます。

Set OUT[0] == Falseが追加されました。そのOUT[0]はまさに先程追加したActions ConfigurationにあるOutput1,2,3のような数字設定です。
実は右にもStatement Propertiesがあり、OutputPortはDefault=0でOutput[0]を使用します。今回はOutput[1]を使いたいので、OutputPortniに1を入れてください。
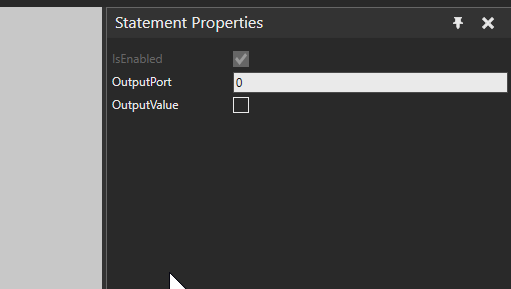
Done!

いまはLIN P2 GripperTcpのコマンドが実行完了したらOut[1]をTrueにセットするようになりました。
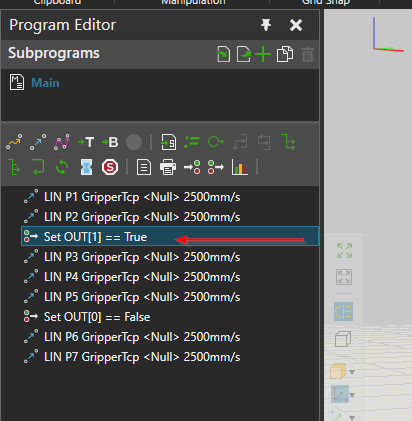
同じ操作でSet OUT[1] == Falseも挿入しましょう。

Test again!
Done!おめでとうございます!あなたもVisual ComponentsでPick and Placesのアプリケーションができます!