In this article, the EtherCAT FSoE module from Pilz creates an FSOE Slave connection and performs safety communication with the Beckhoff Safety Terminal EL6910.
Let’s start!
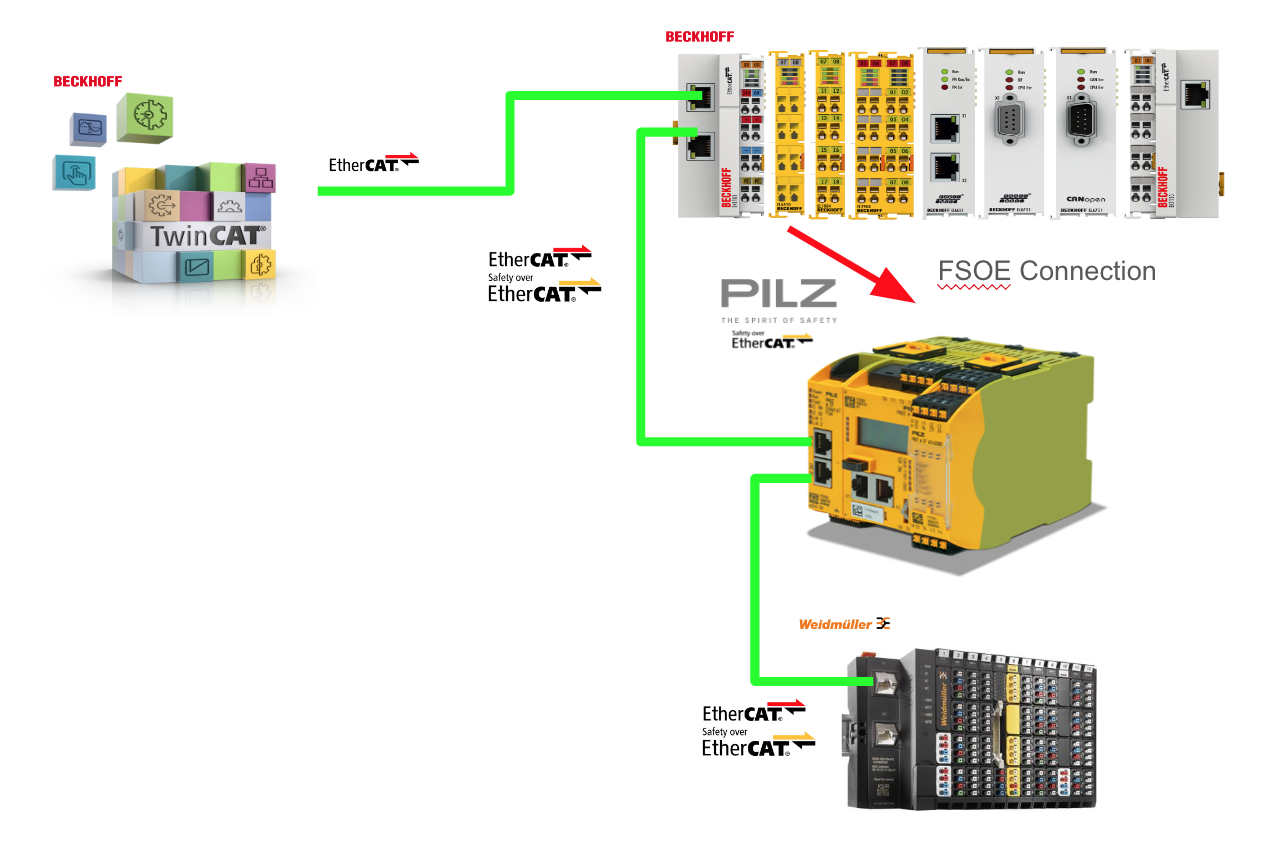
FSoE Slave with PNOZmulti 2 Module
The FSoE slave function is implemented by ETG 5001 – 195. Note that the FSoE slave function does not include safety parameters.
In addition, up to four connections to FSoE master devices can be created.
Reference Link
Reference Video
Pilz.Startup FSOE Slave with PNOZ m EF EtherCAT FSoE (with Beckhoff EL6910)
Pilz.PNOZ m EF EtherCAT FSoE Introduction
Pilz.Startup FSOE Master with PNOZ m EF EtherCAT FSoE (with TwinCAT3)
Beckhoff.Let’s connect Weidmueller’s UR20-FBC-EC-ECO with FSOE EL6910
Codesys.Let’s use EL6910 TwinSAFE!
Imeplemation
Pilz Side
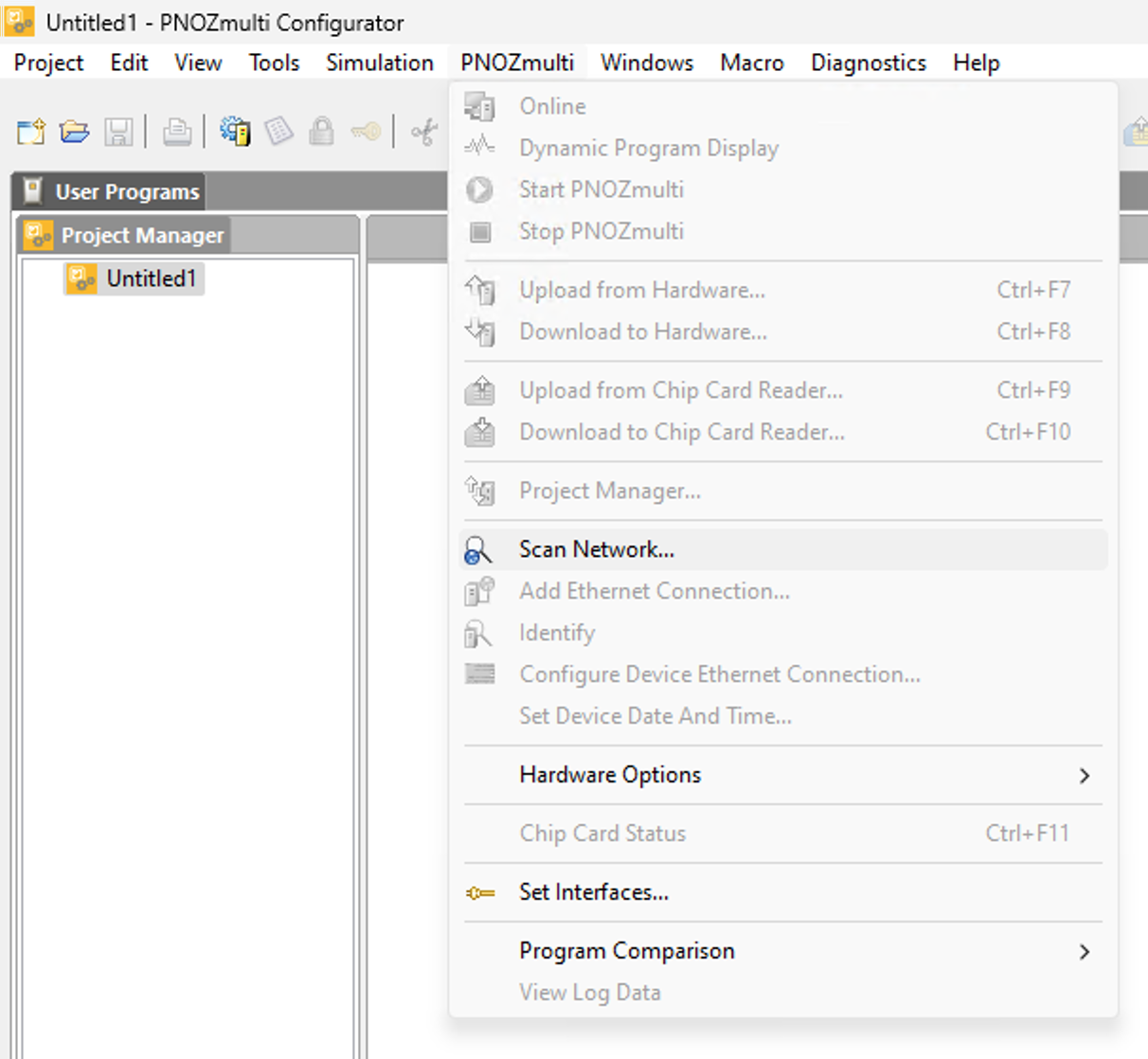
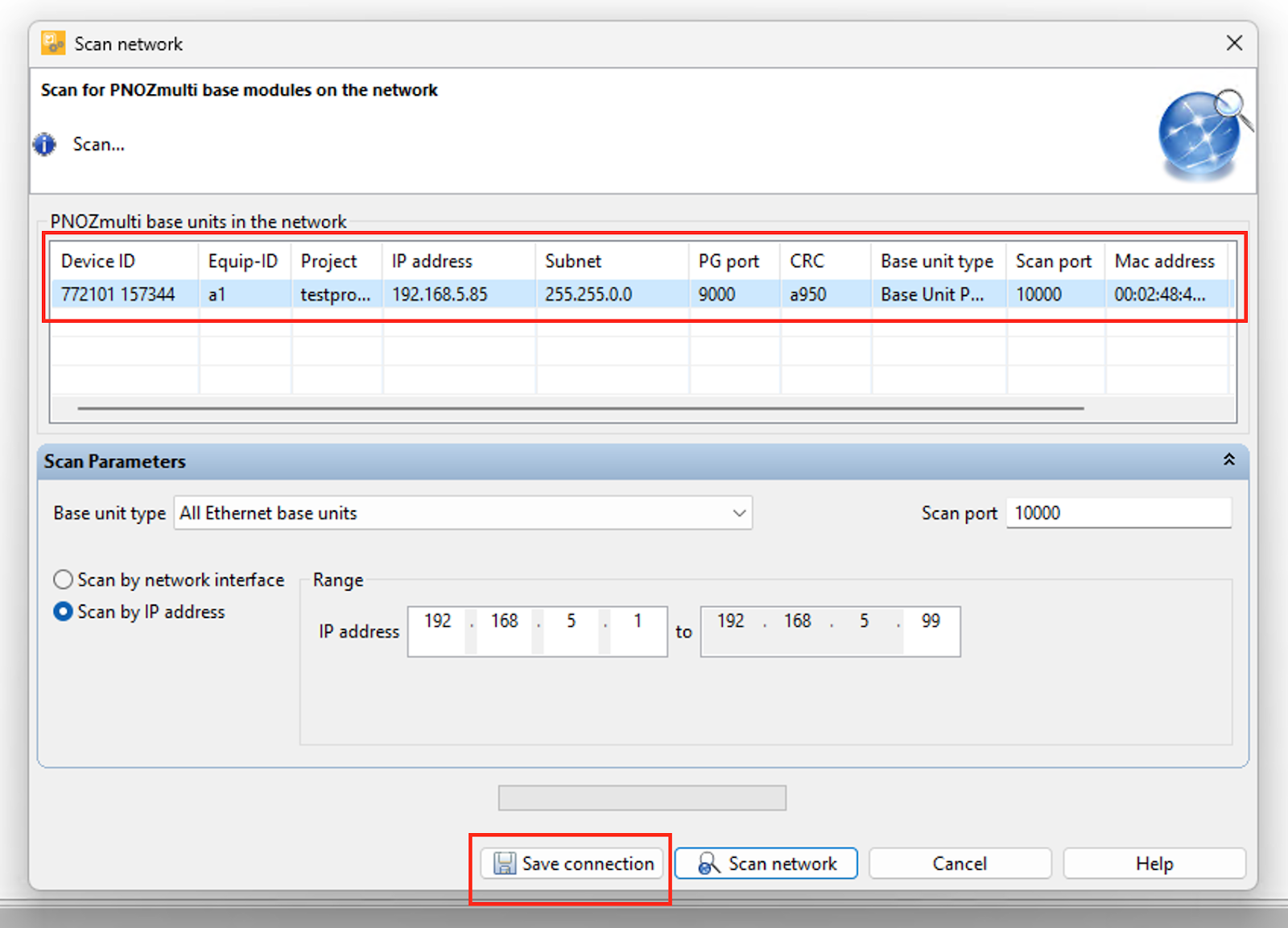
Scan Network
Click PNOZmulit>San Network to locate the PNOZ Controller currently on the network.
Select “Scan by IP Address,” match the IP range to the actual device, and click “Scan network.
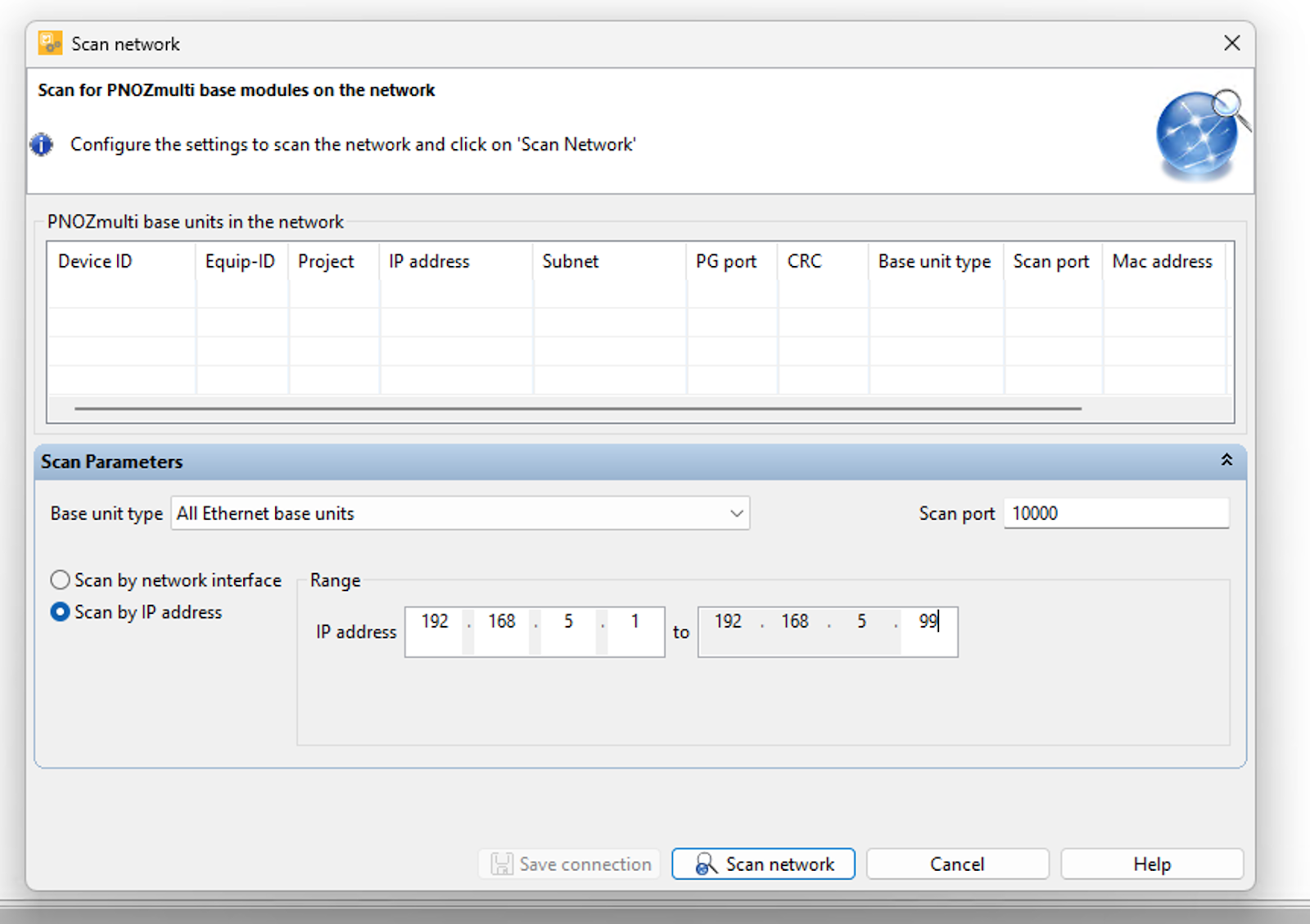
Done!PNOZ CPUs are now searched. Select the appropriate CPU and click Save Connection.
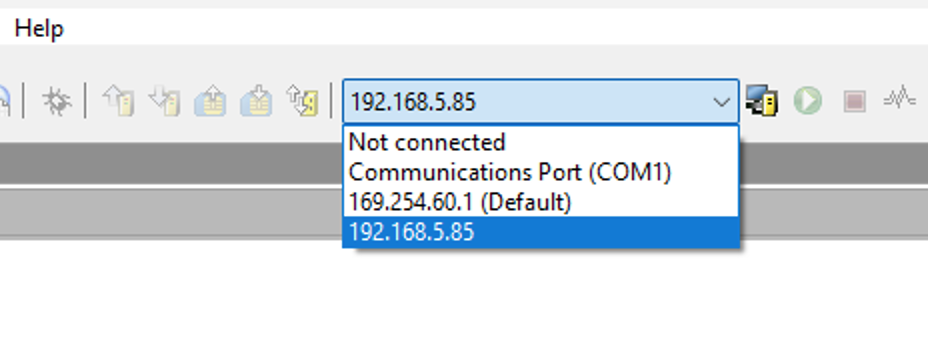
From the Toolbox of the tool, we found the IP address that was just found in the search.
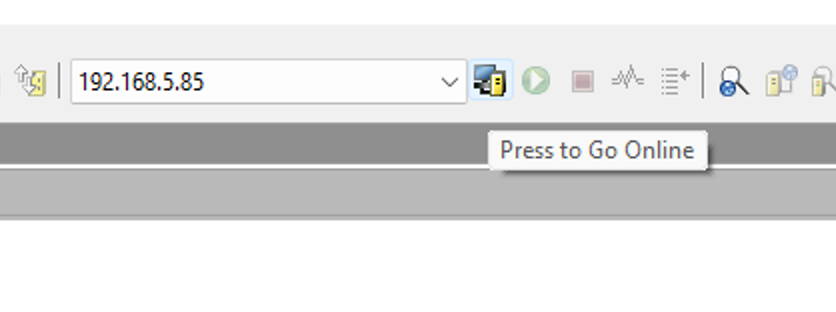
Go to Online
Connect the CPU to the PC.
Upload the Project From CPU
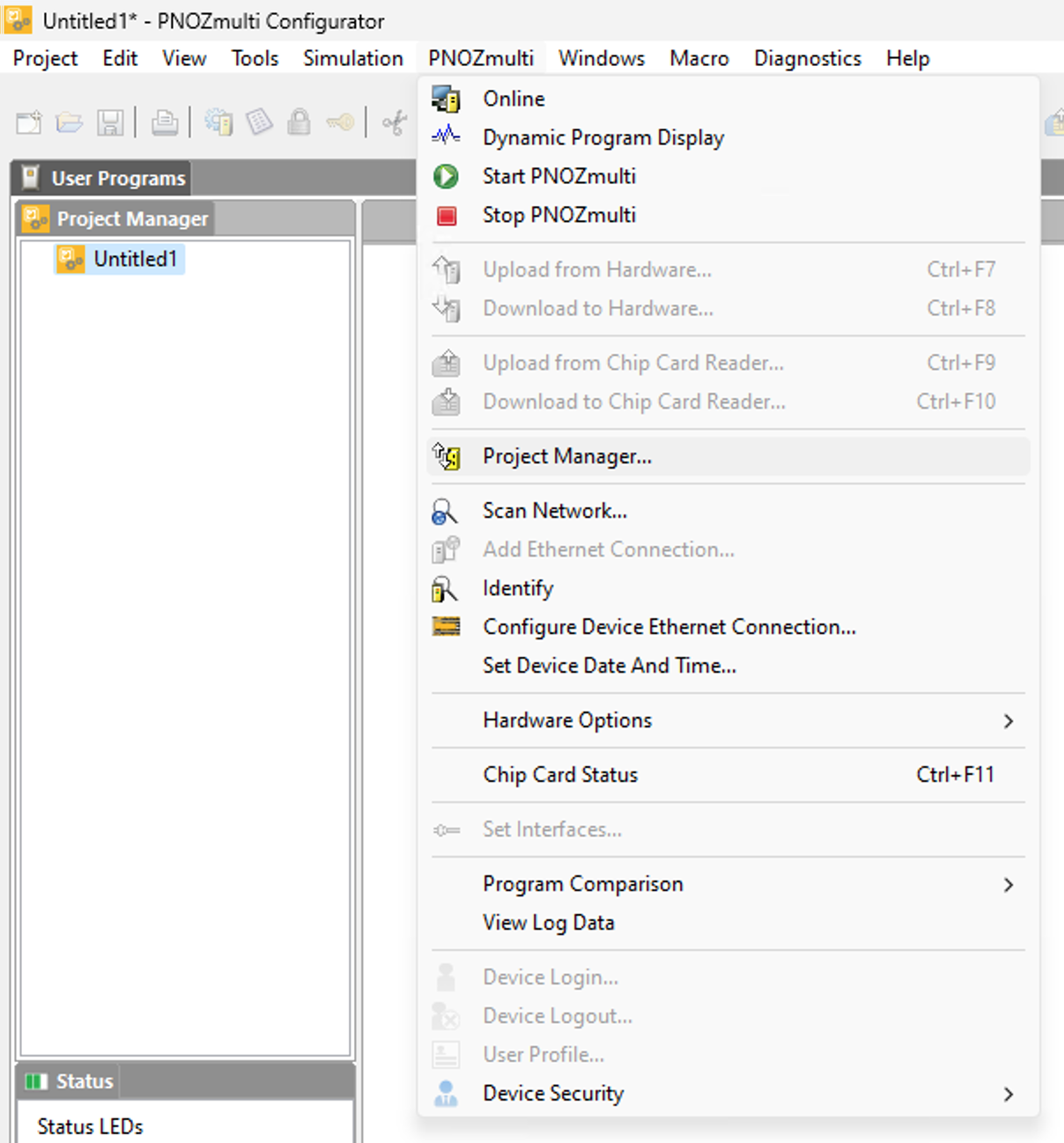
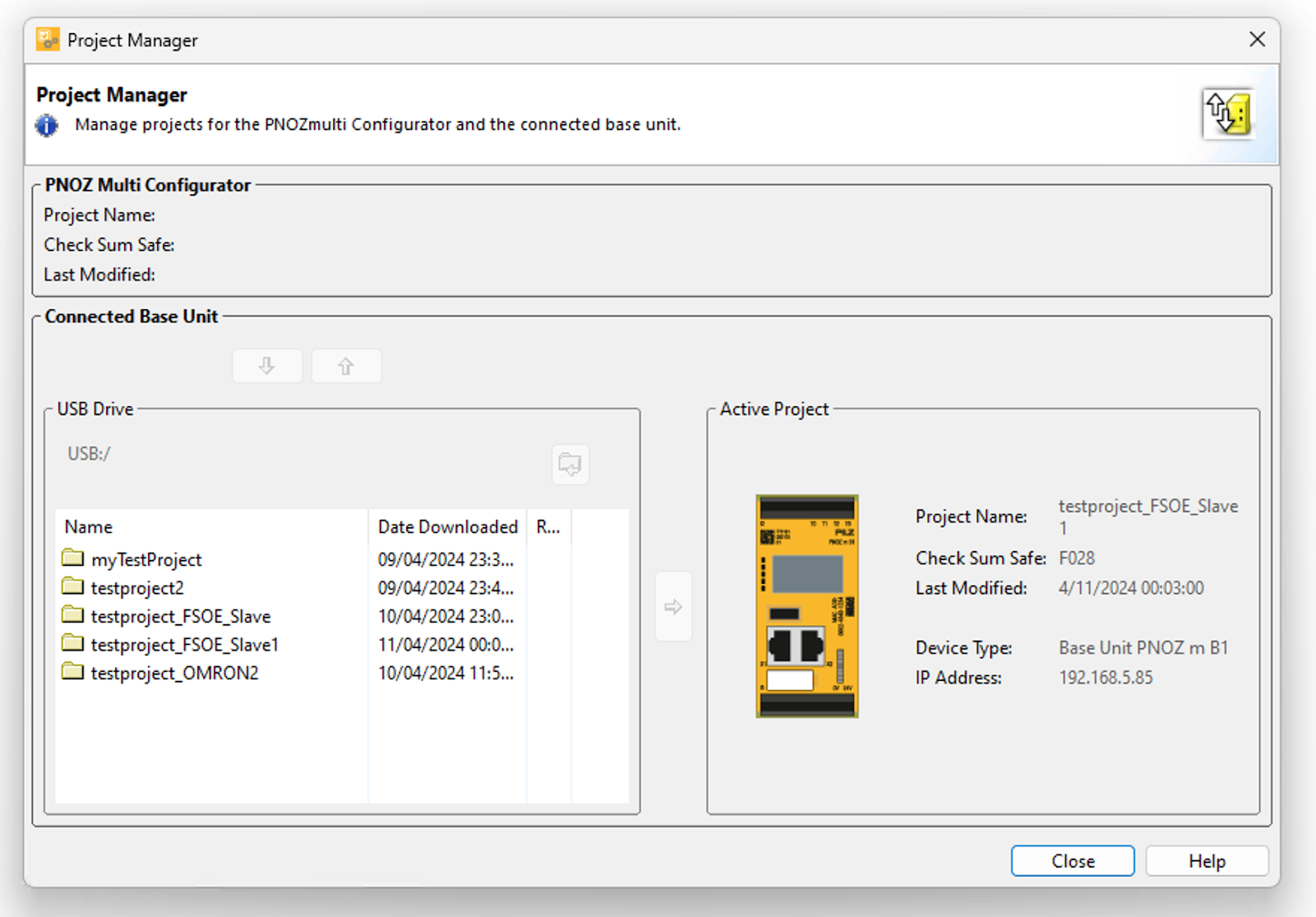
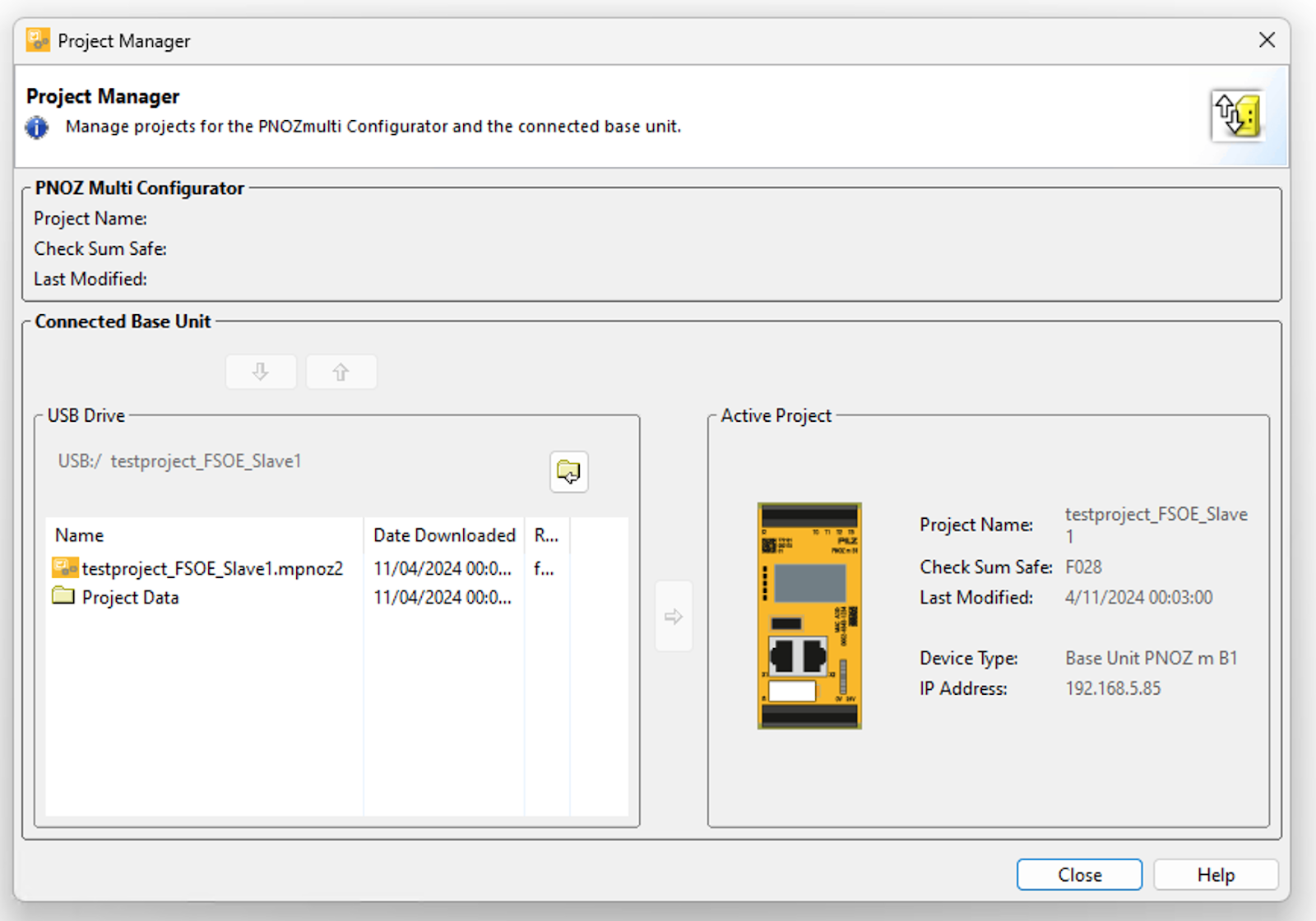
This time, first open PNOZmulit>Project Manager in order to upload the project on the CPU.
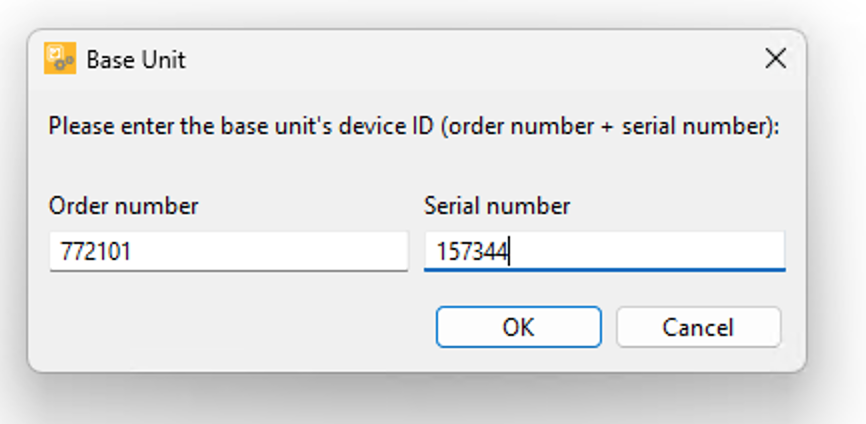
Enter the Order Number and Serial Number of the CPU.
The project management screen will appear.
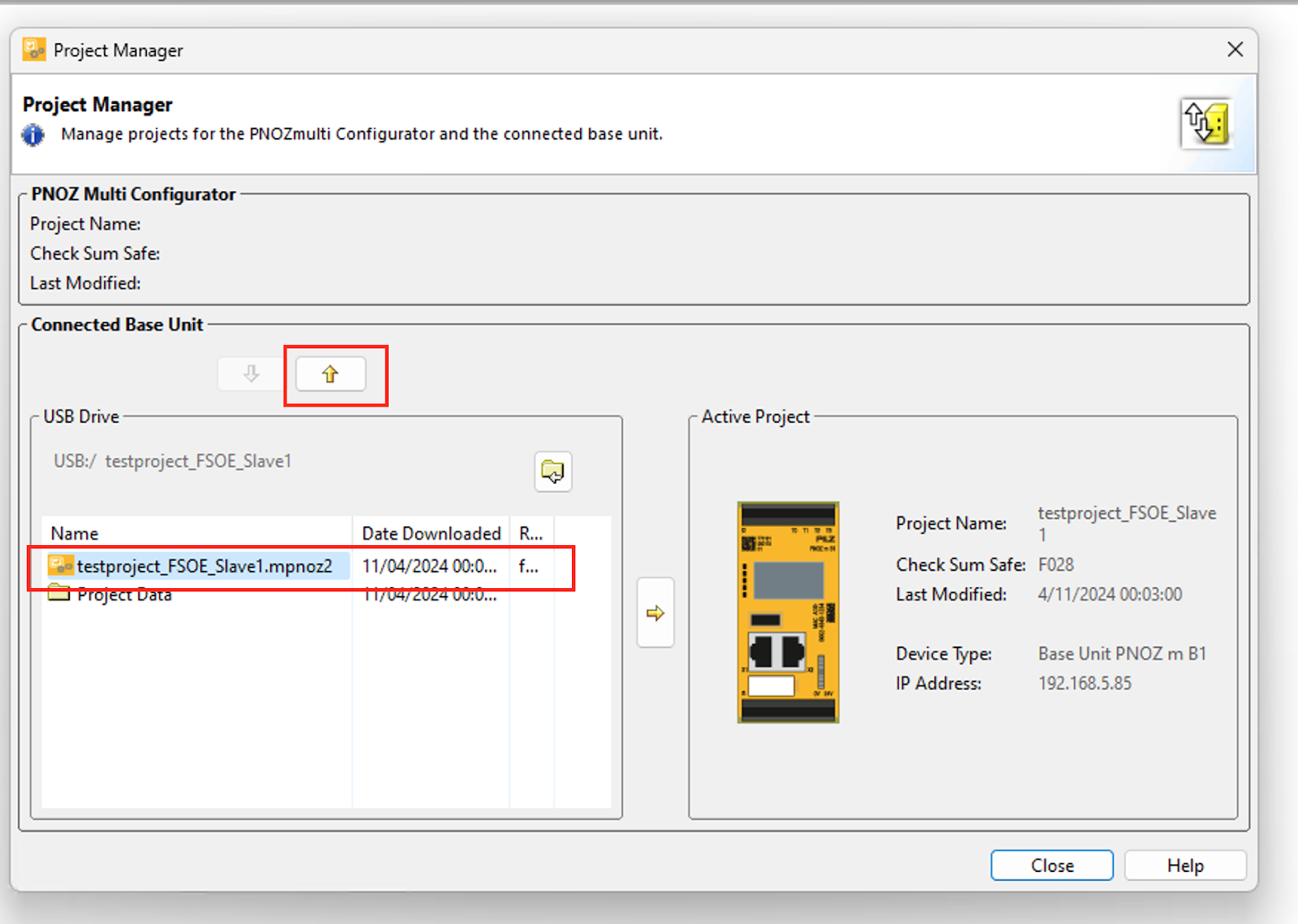
Double-click the project you want to Upload from the CPU to the PC.
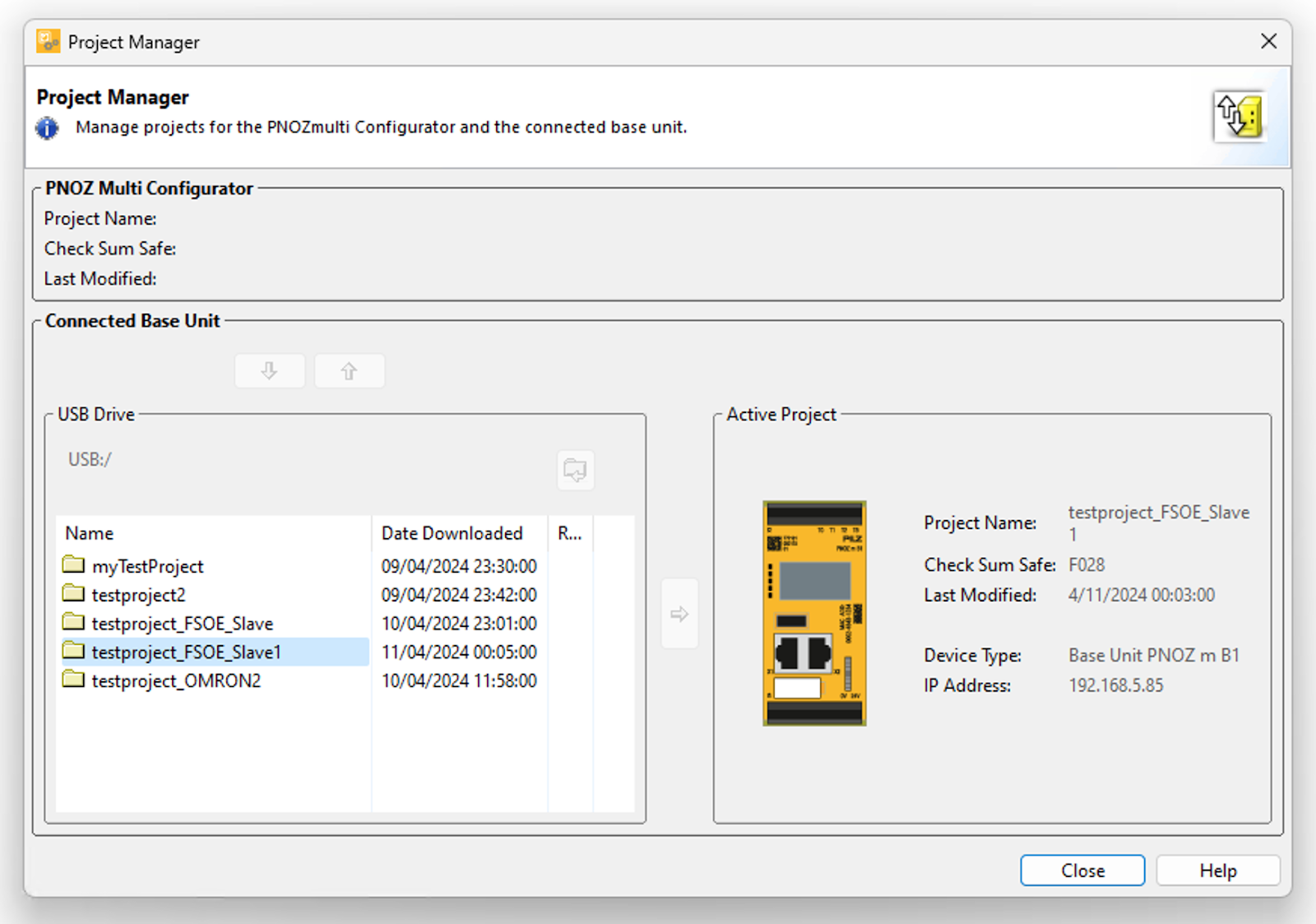
This time, select the project with the last date.
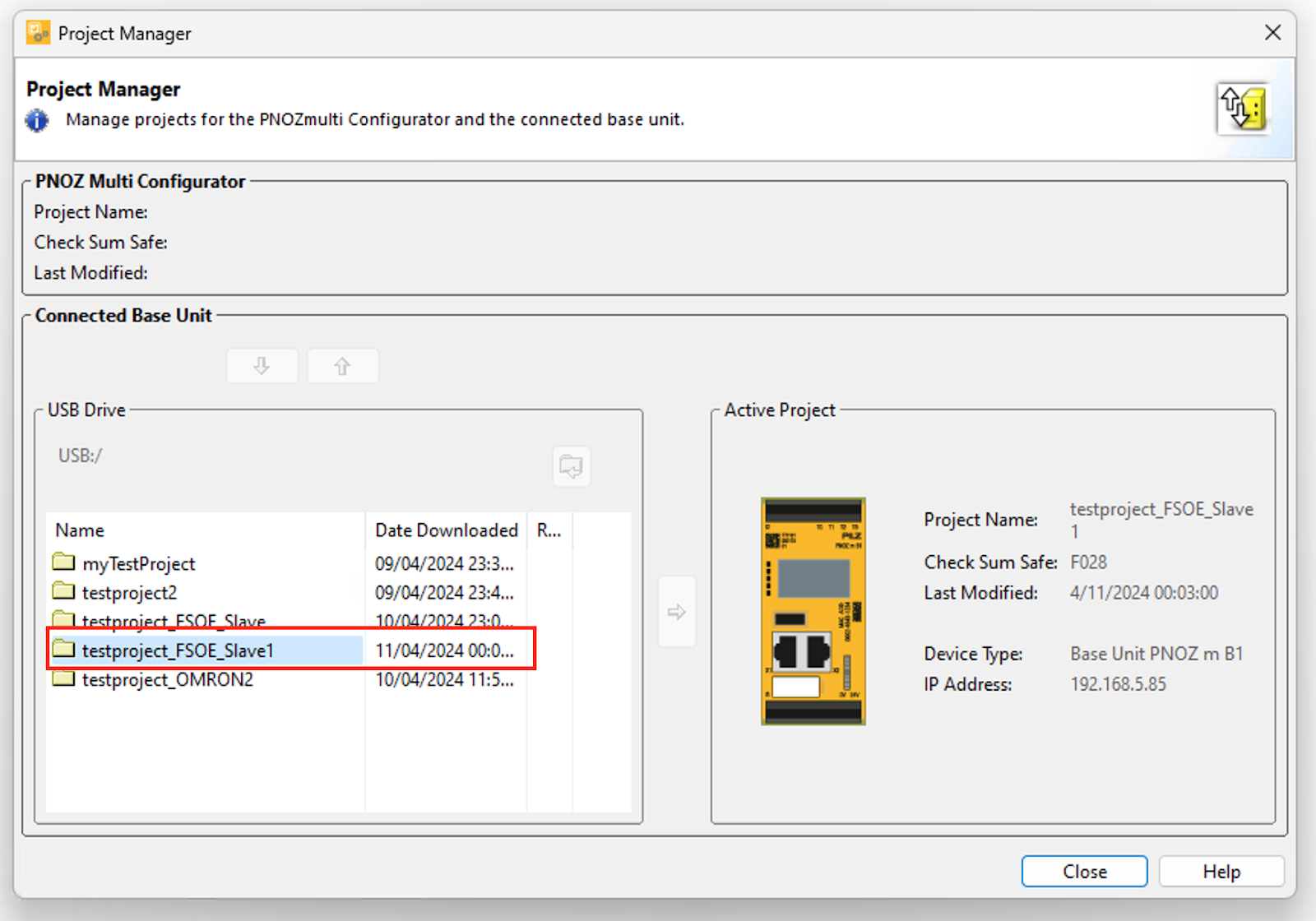
The Project File itself and its data are displayed.
Select the project body with Pilz ICON and click the up arrow in the red frame.
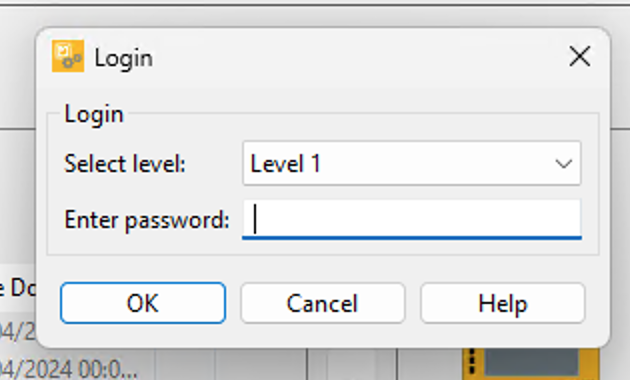
Enter the project Password.
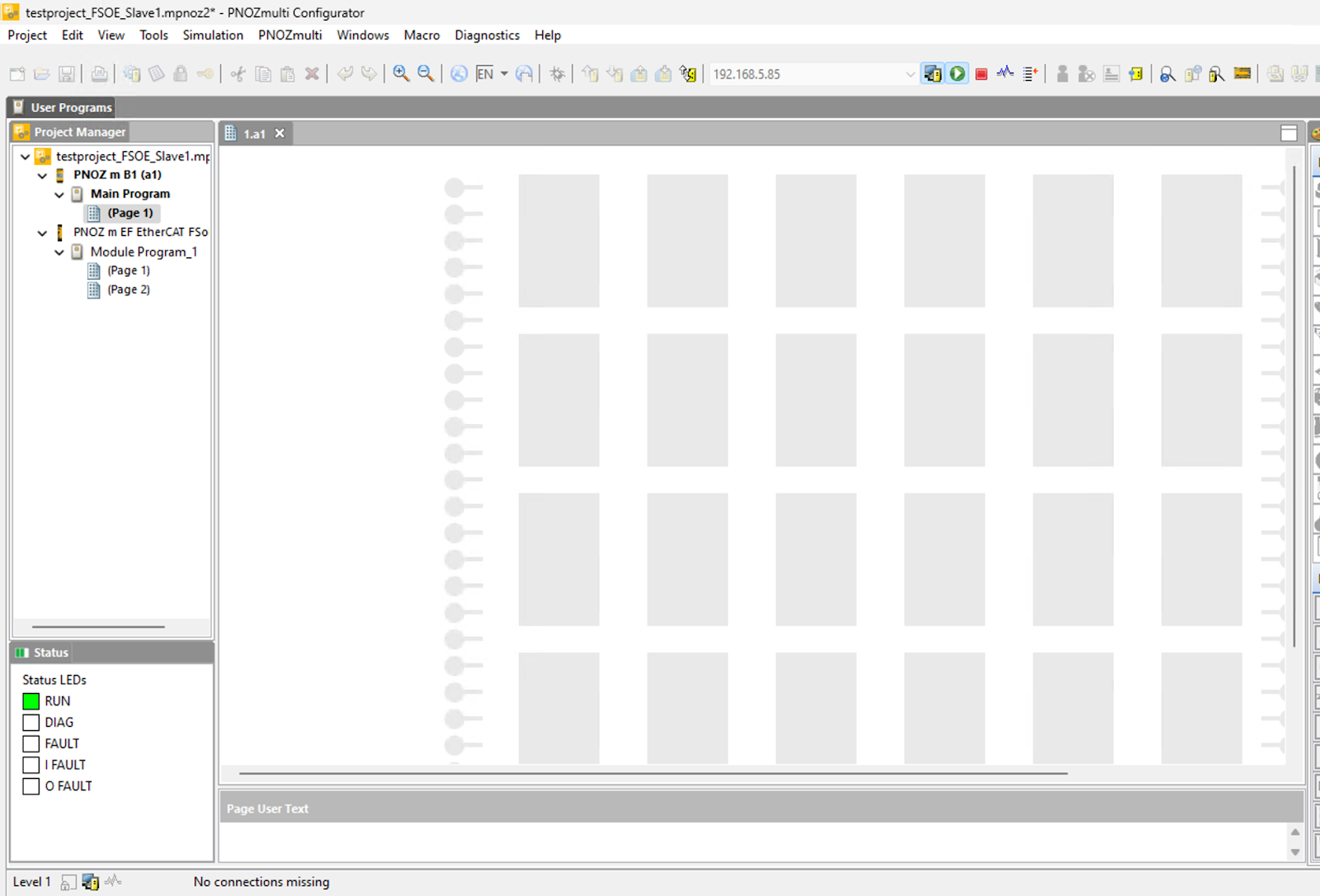
Done!The project has been Uploaded.
Save Project
Enter the project Name and save your project.
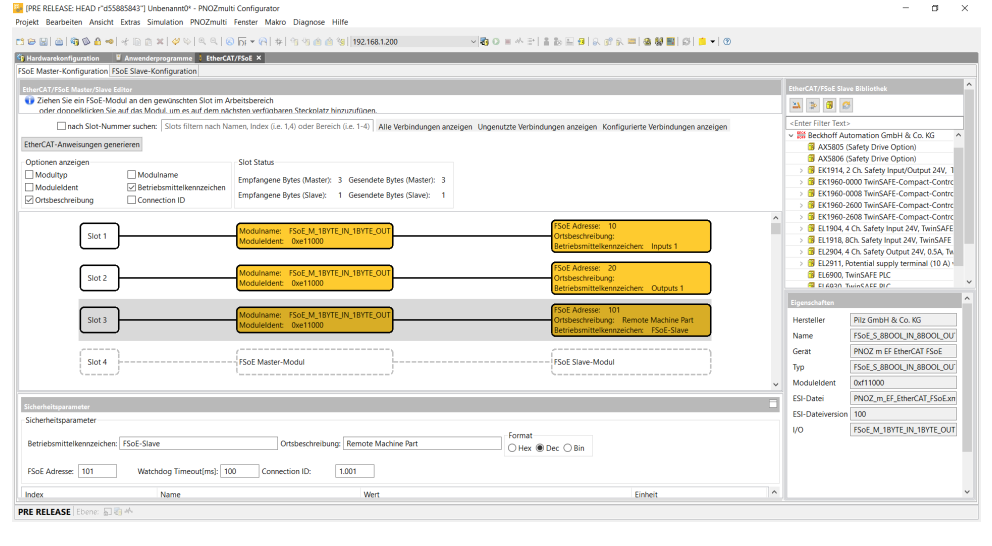
Configure FSoE Slave Connection
Now we can set the EtherCAT/FSoE Configuration.
This is the EtherCAT/FSoE connection setup screen.
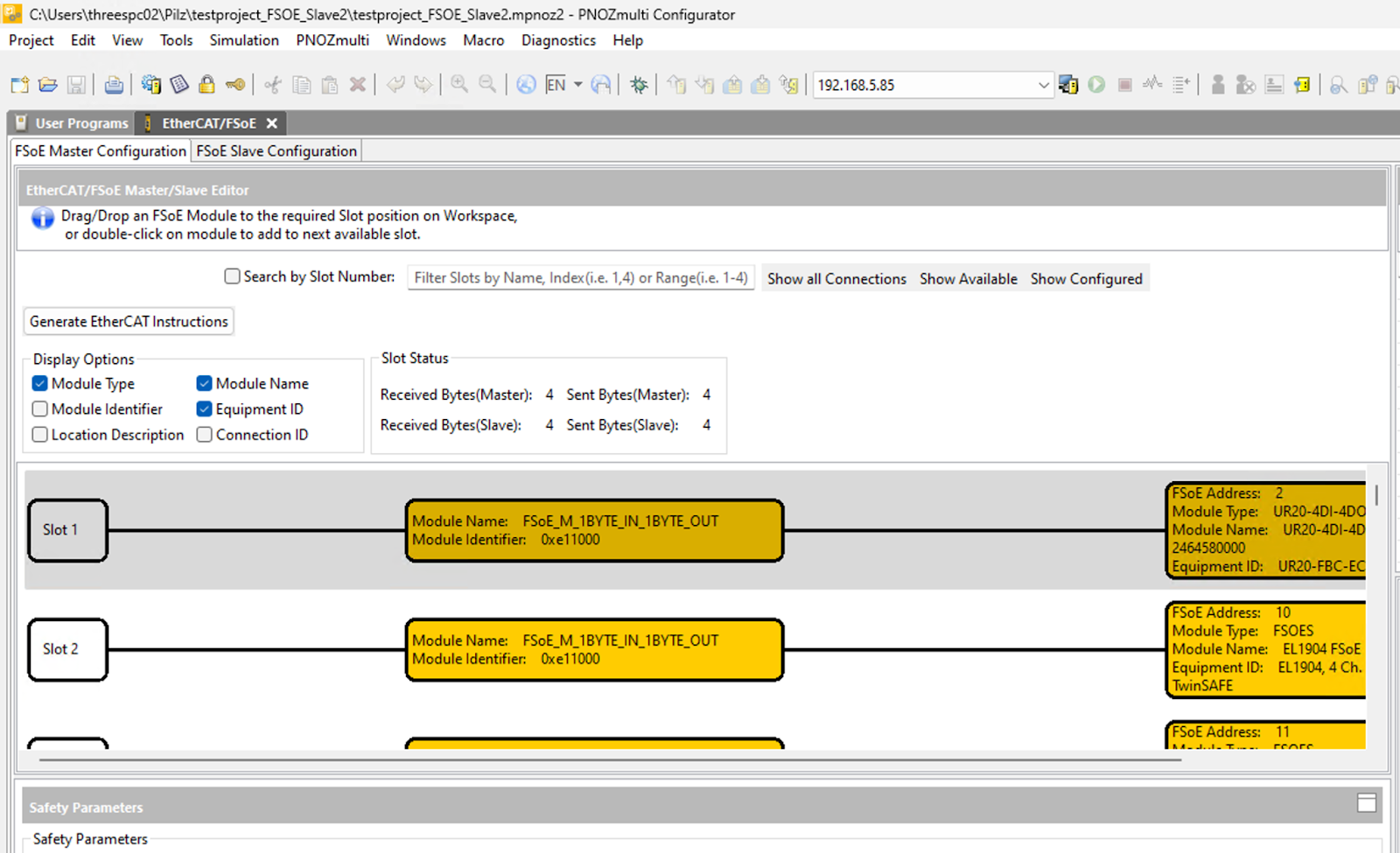
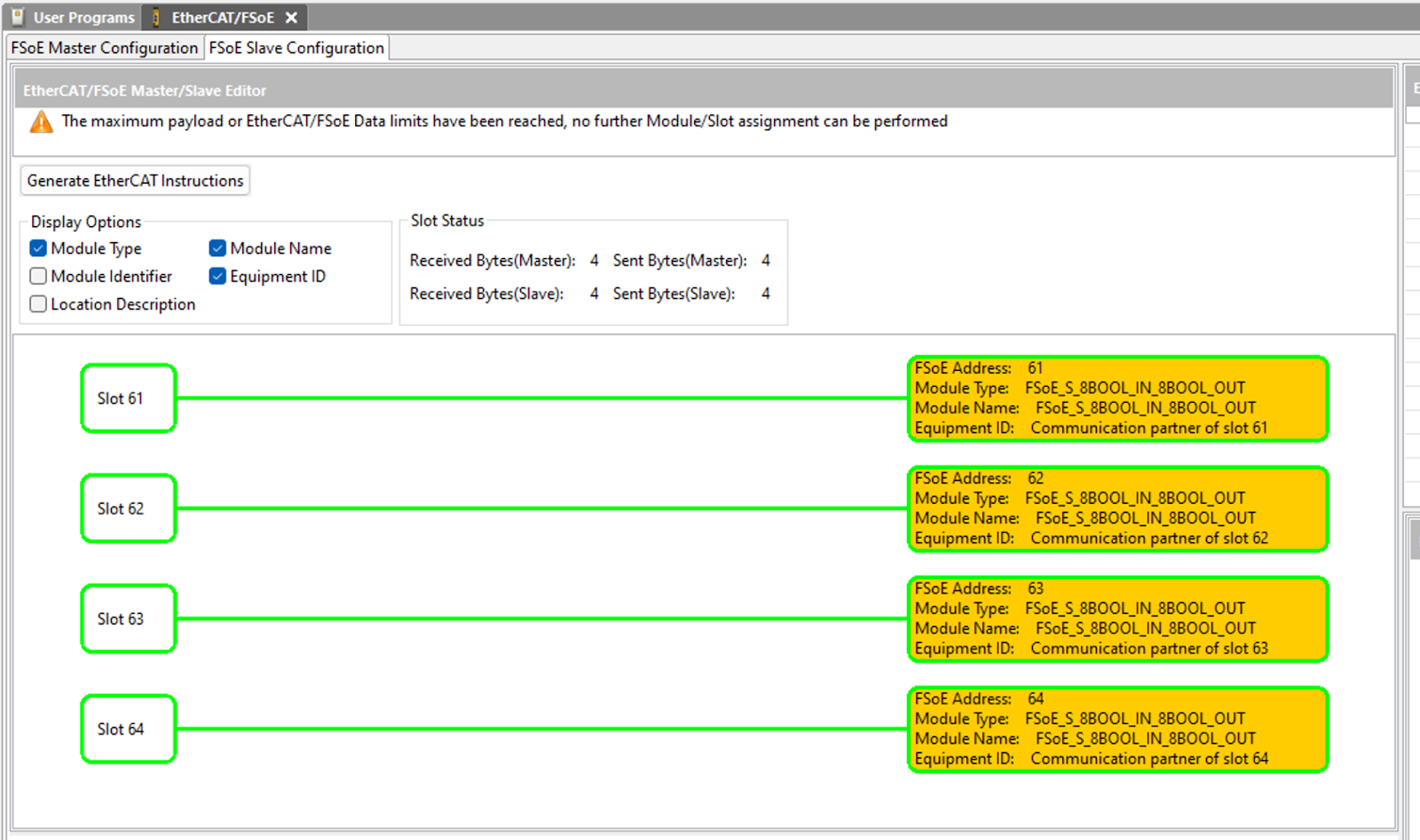
Open the Tab of FSoE Slave Configuration and drop FSoE_IN_8BOOL_OUT,0xf11000 from EtherCAT/FSoE Slave Modules.
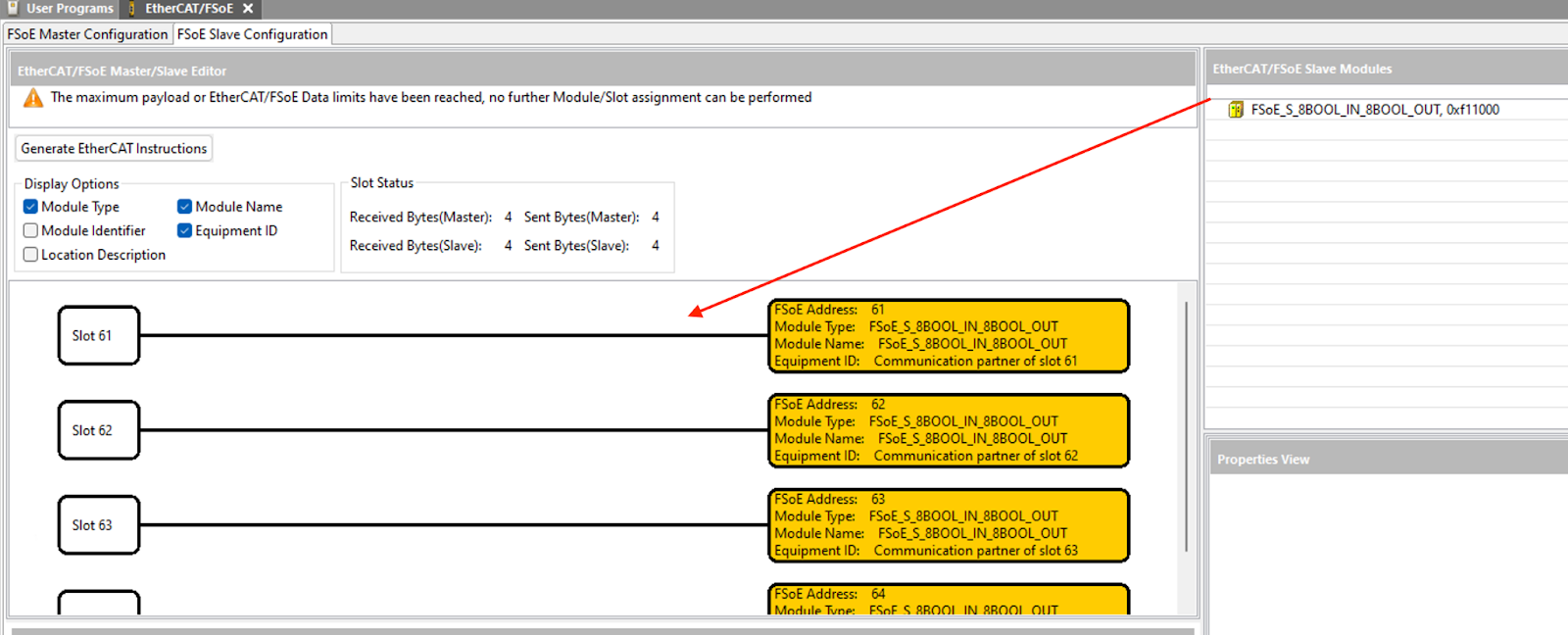
As I said in the previous introductory video, Pilz’s EtherCAT FSoE module can realize up to 4 FSoE Slave Connections, so this article will be added to those 4 ️ FSoE Slave Connections at the same time.
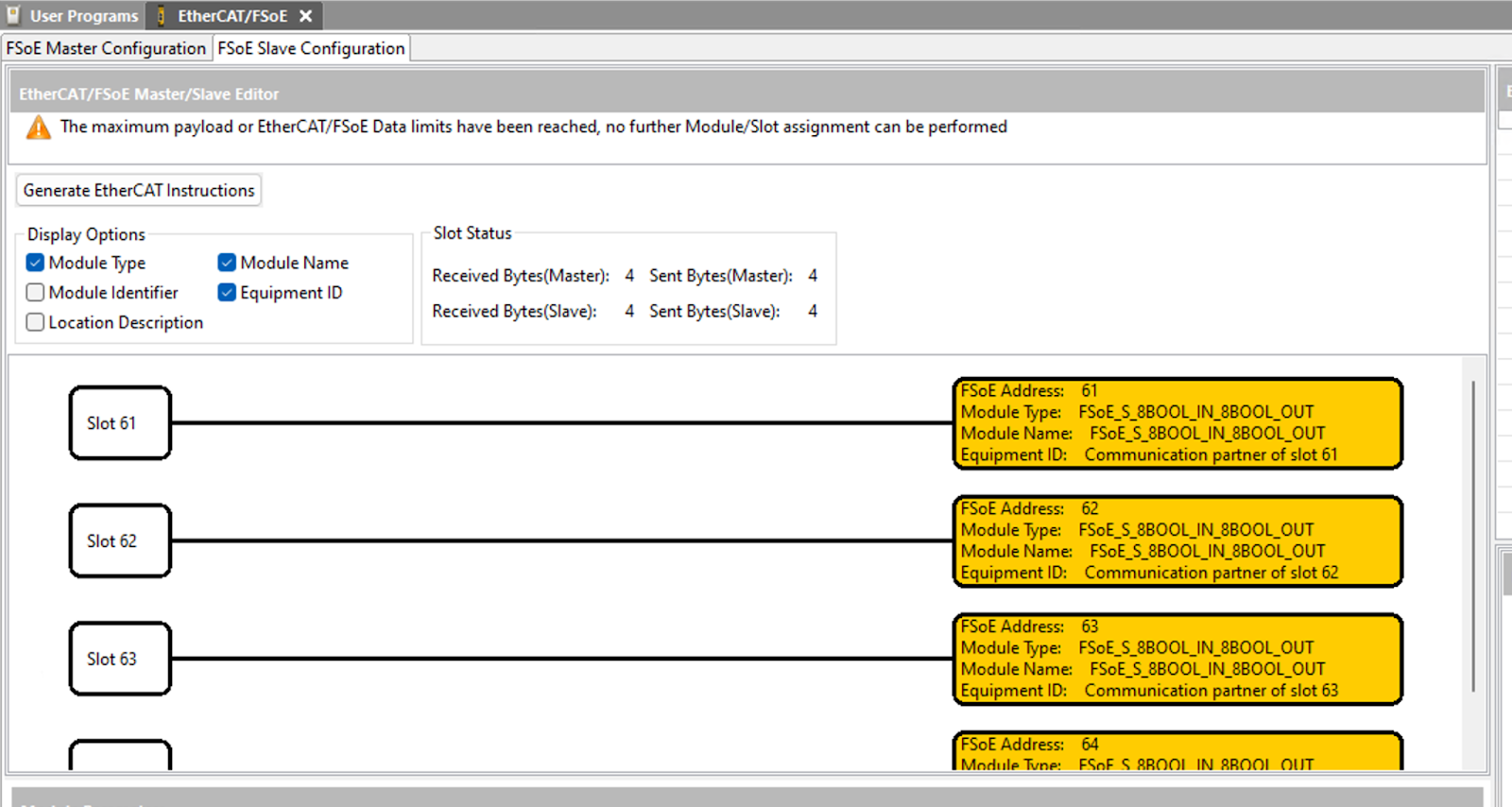
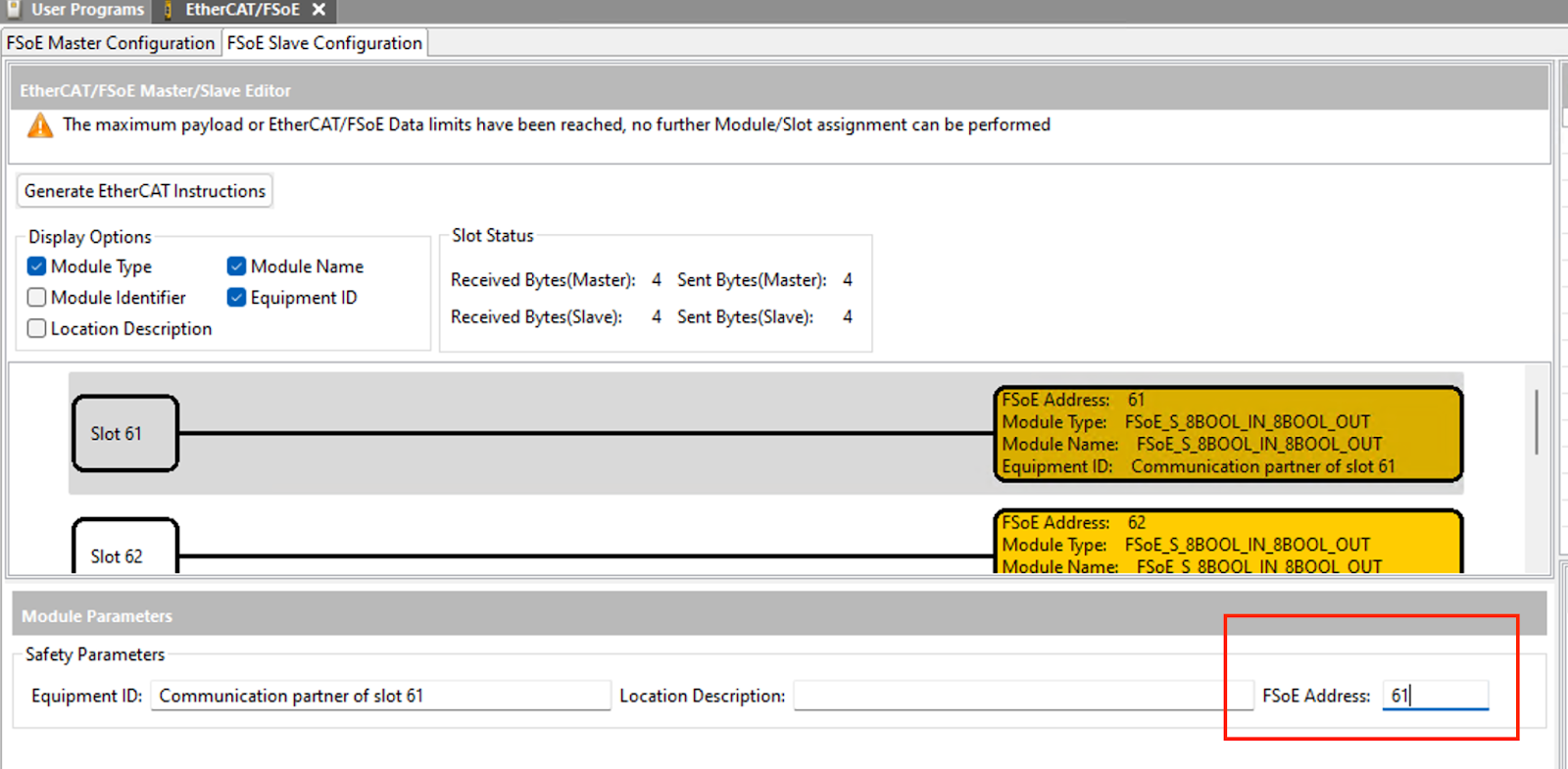
FSoE Address
Don’t forget to set the FSoE Address for each Connection as well.
User Program
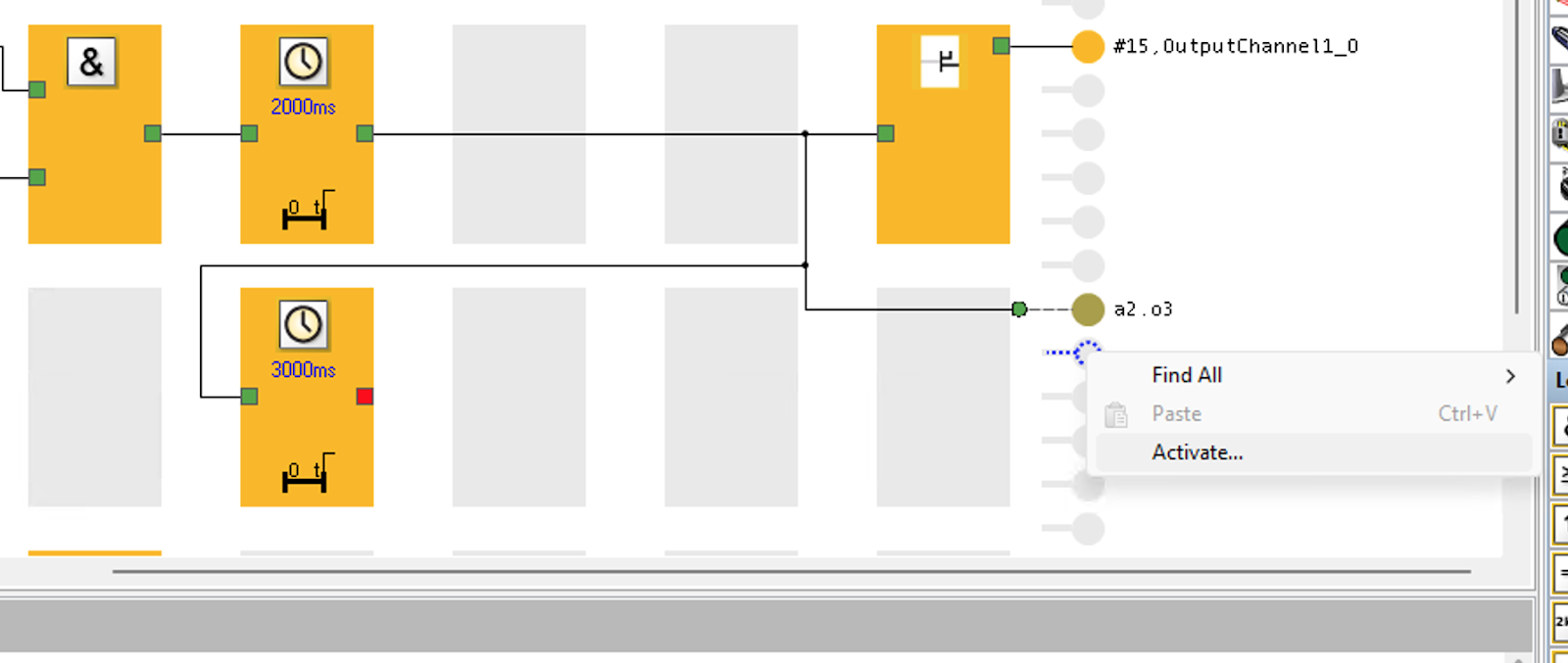
Now we can change the User Program. Right click on the rightmost output area>Activate and add a new output point.
This is the Activate Input/Output setting screen.
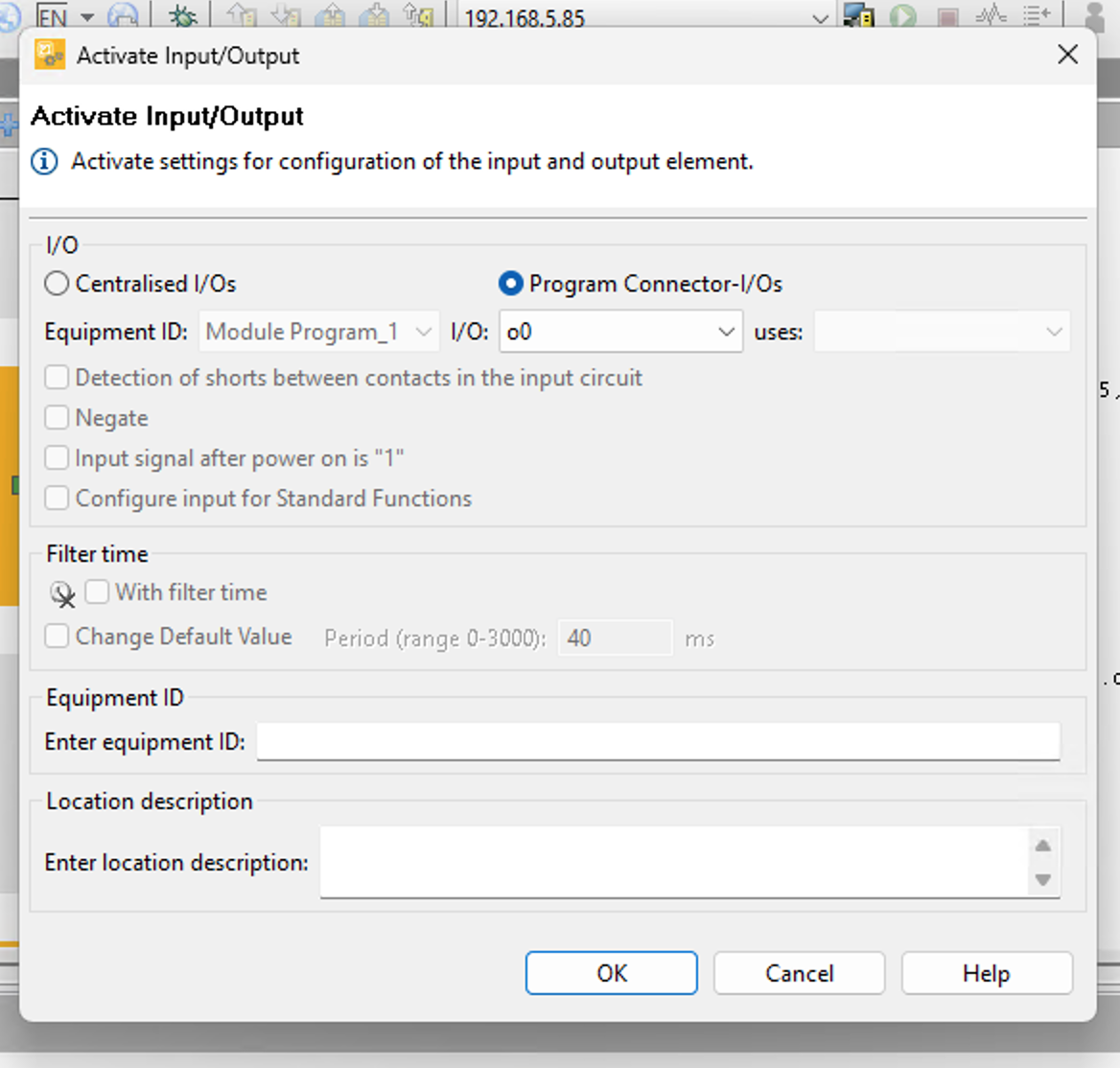
Set I/O to Centrailsed I/Os.
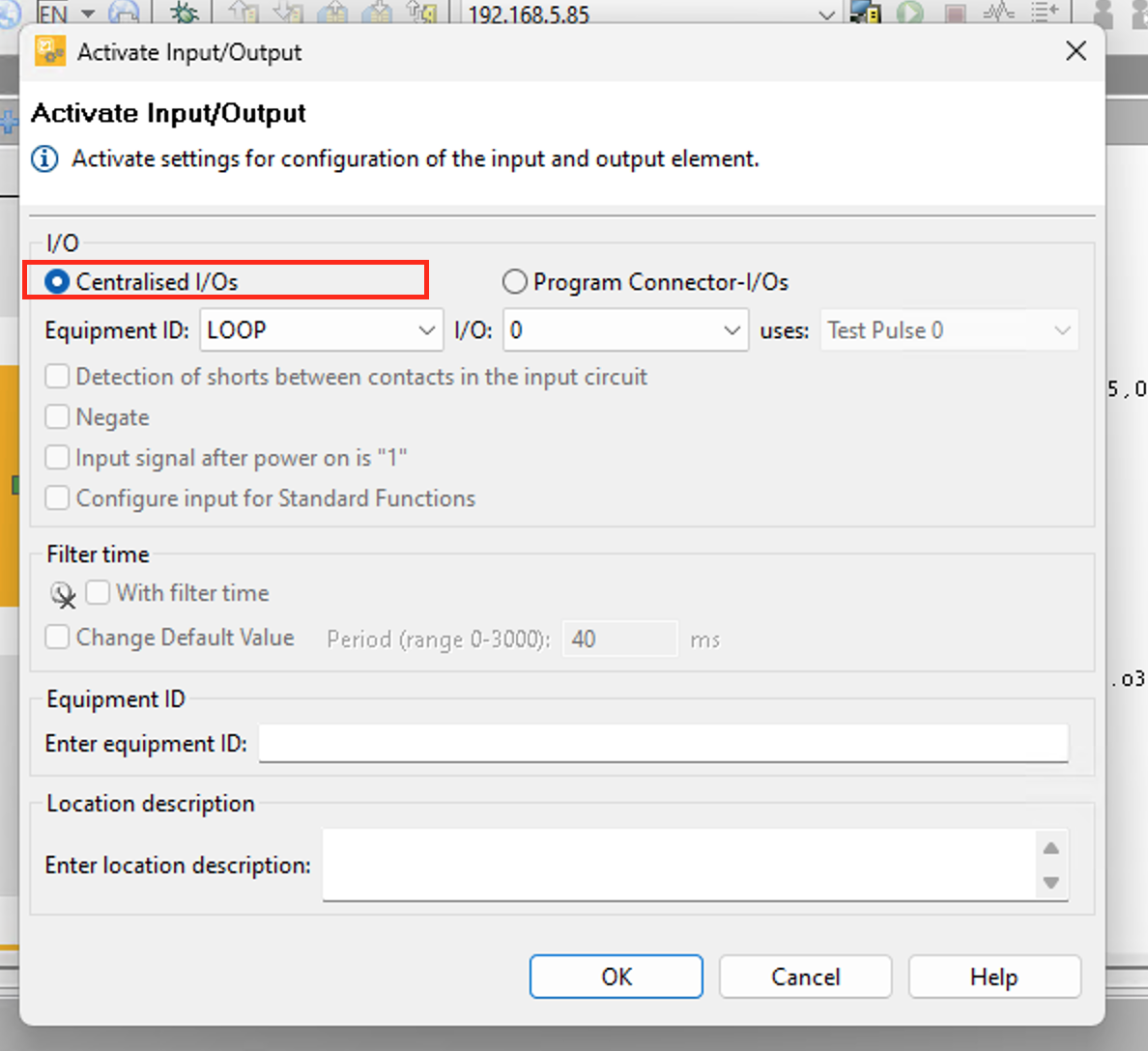
Set the Equipment ID to the FSoE Slave Connection you just added.
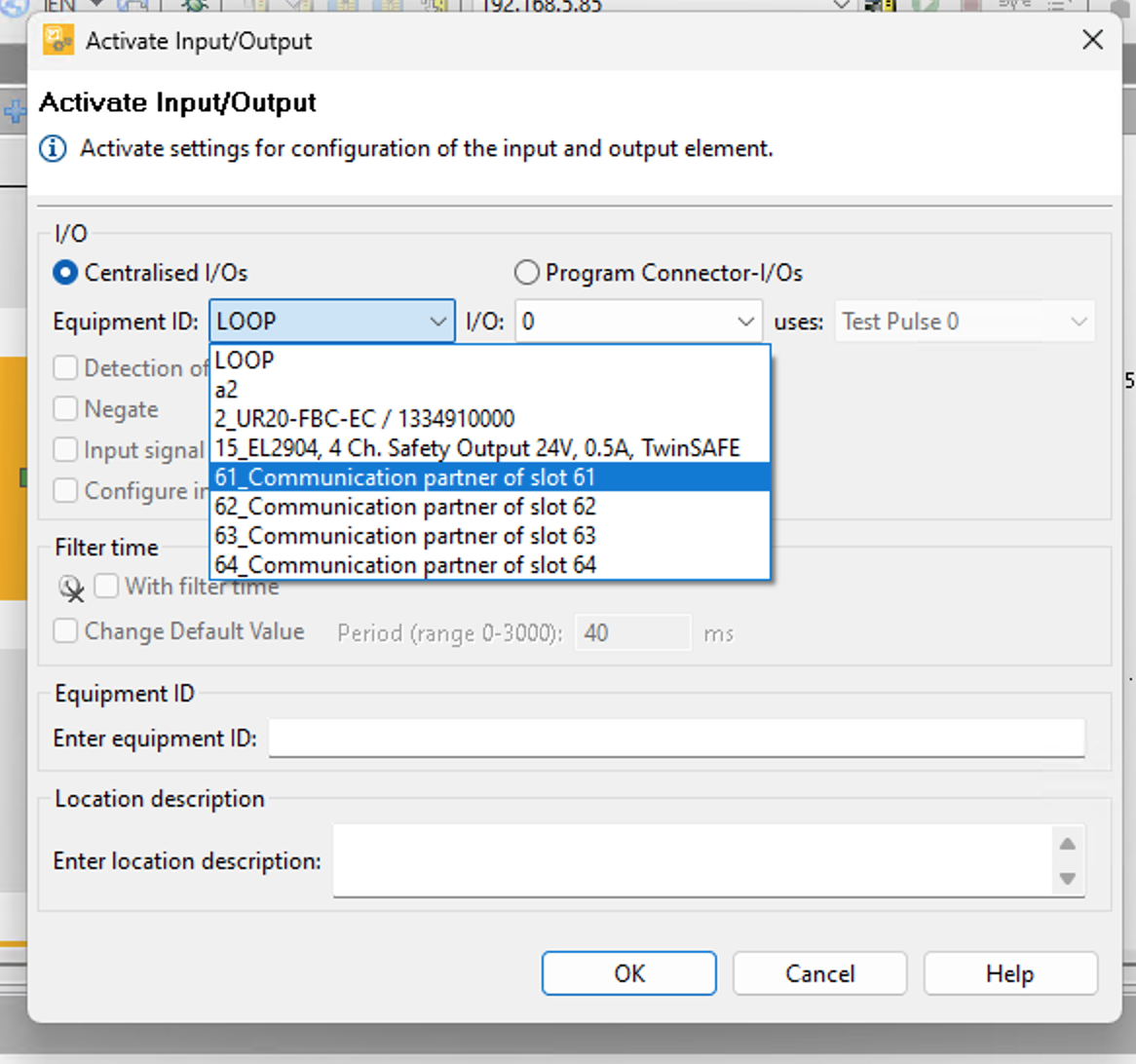
In this case, we will use Slave Connection at FSoE address 61.
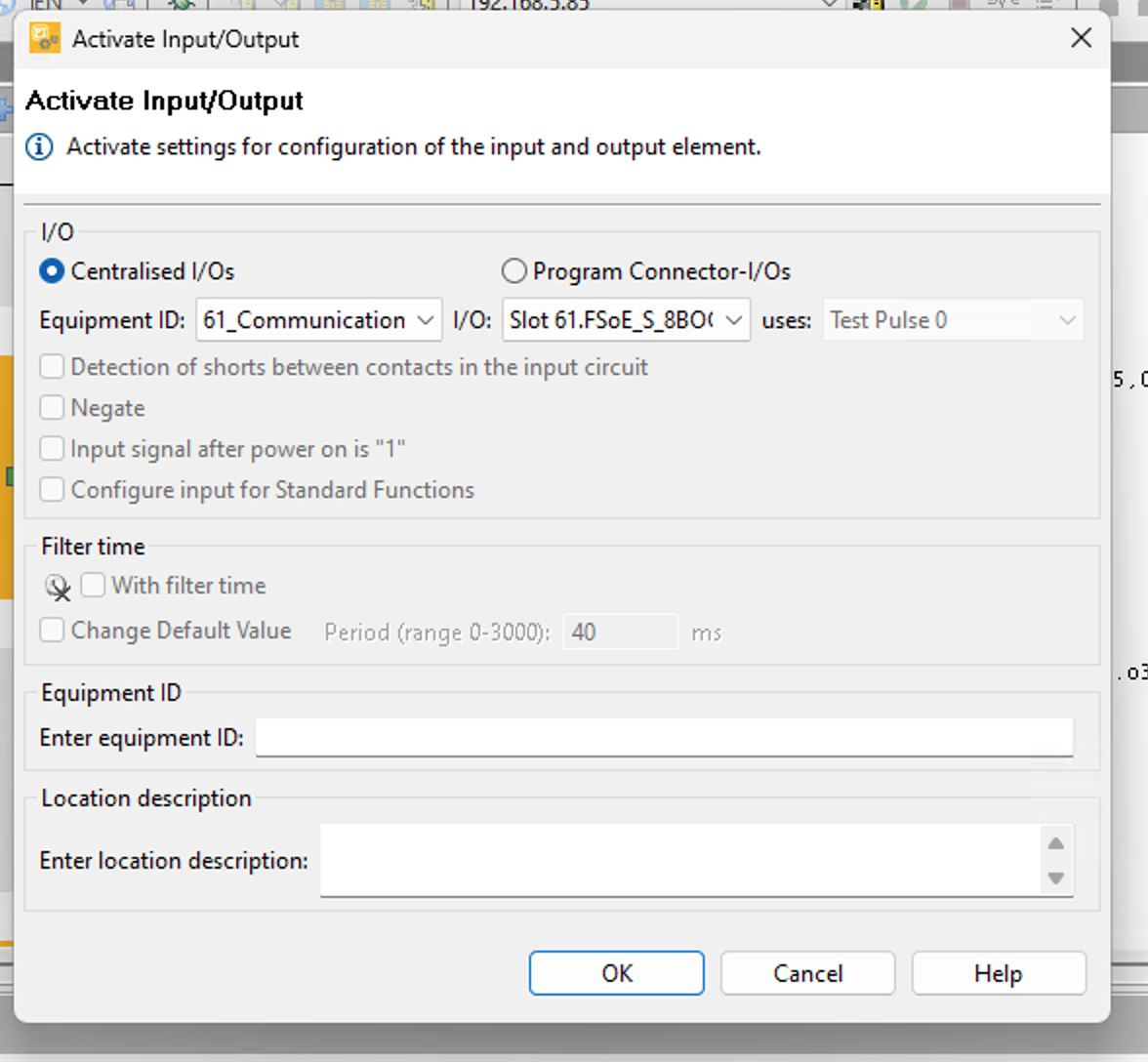
Set the Bool data to be used from the I/O setting item. This time, the 0th Bool data is used.
Done!
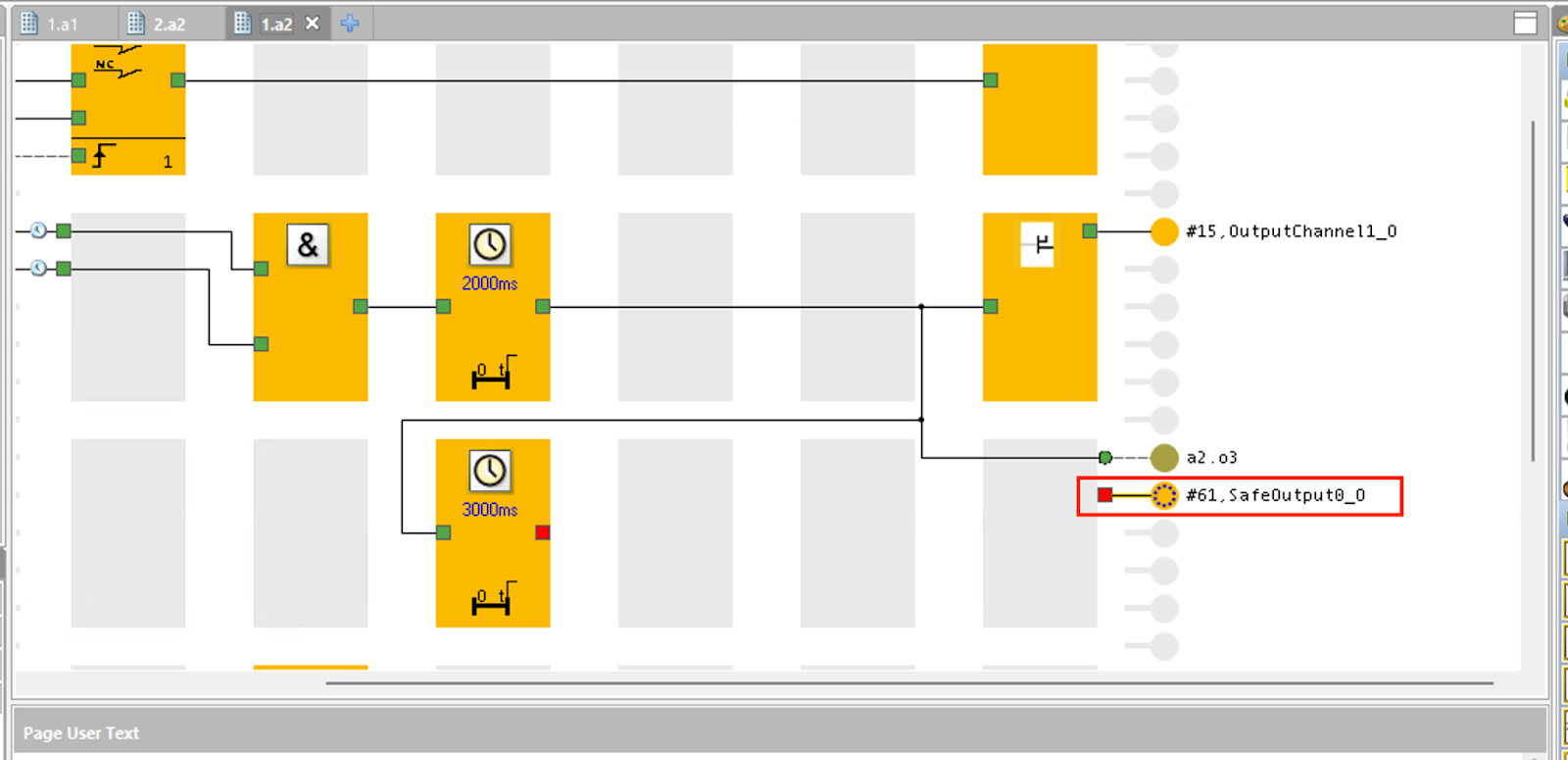
The last one is connected to the emergency stop Block and the FSoE Slave output that was added earlier.
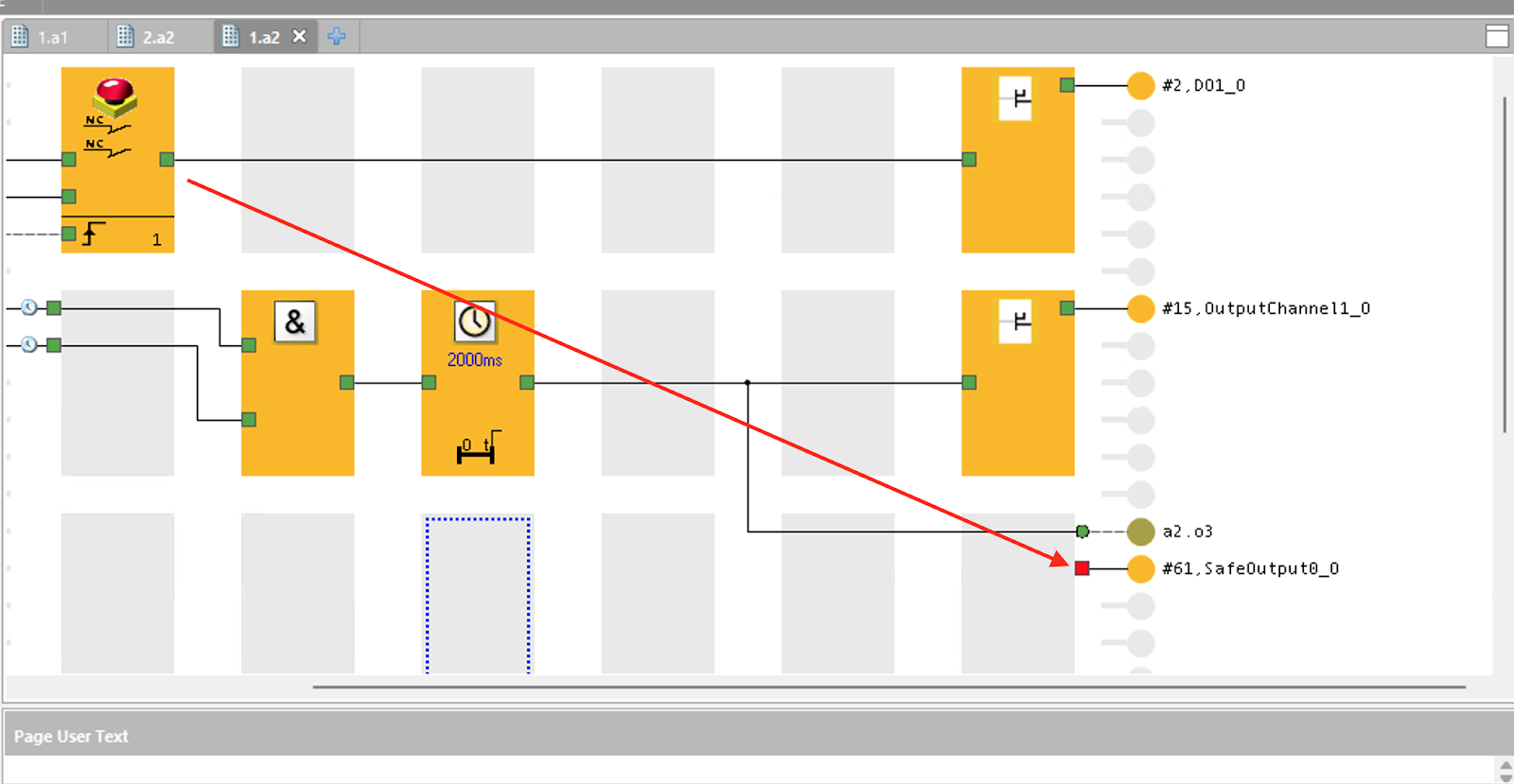
Done!
Next, the safety signal output of the EL1904 is output to the 0th Bool data of the FSoE Slave Connection.
Result
This is the safety program on the Pilz side.
TwinCAT Side
Next we will configure the TwinCAT side.
Scan
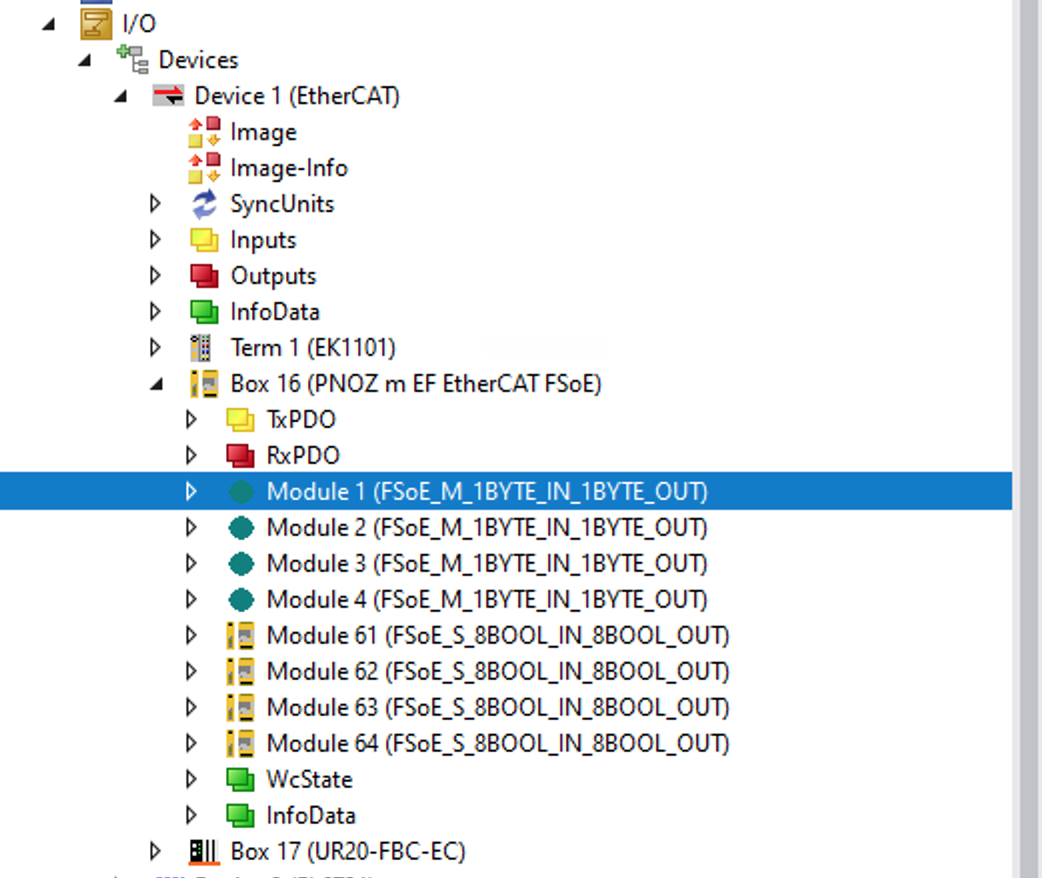
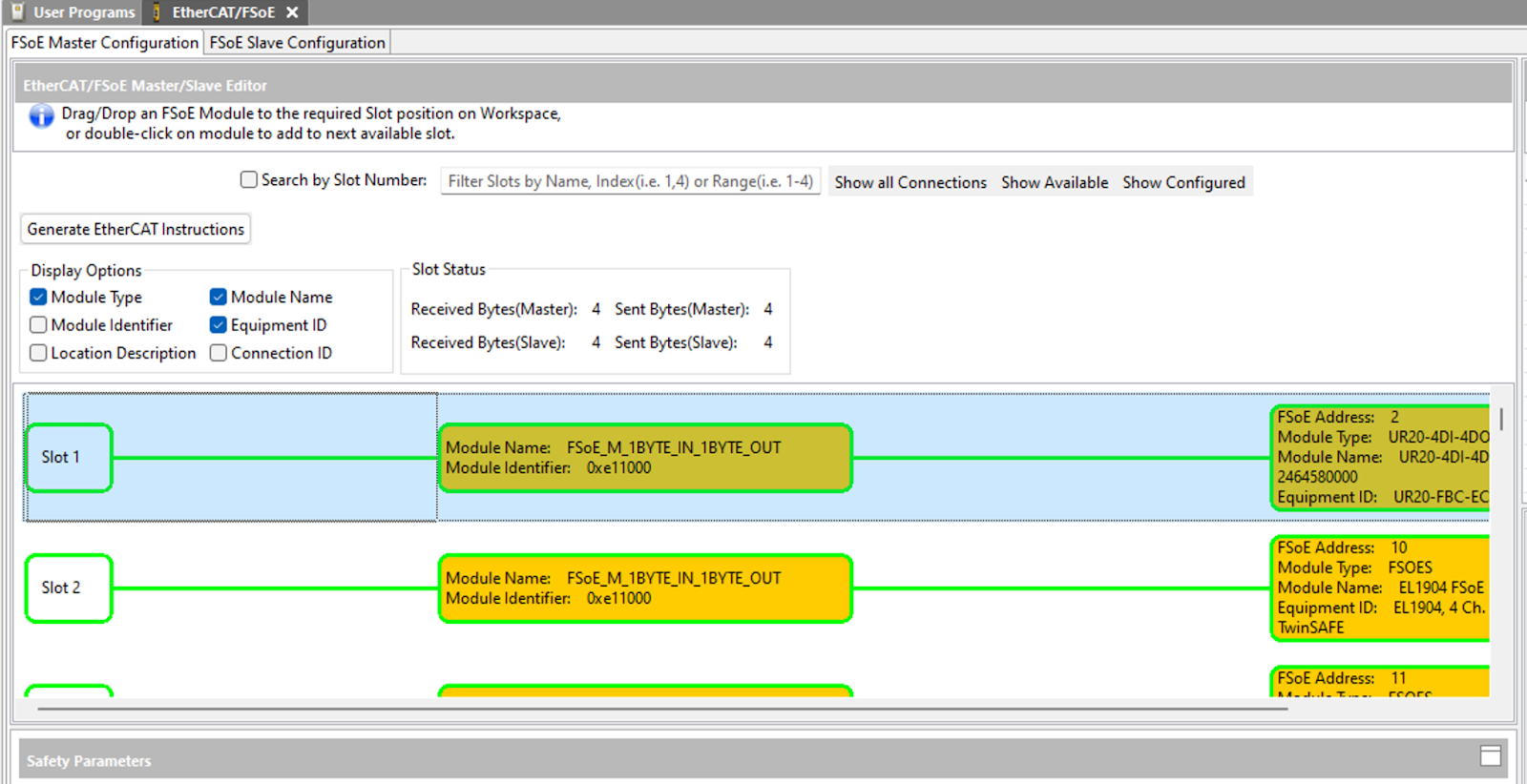
We can use the EtherCAT AutoScan function. Four FSoE Slave Connections were just added on the Pilz side, so there are now more Module61/module62/Module63/Module64 slots in the EtherCAT communication.
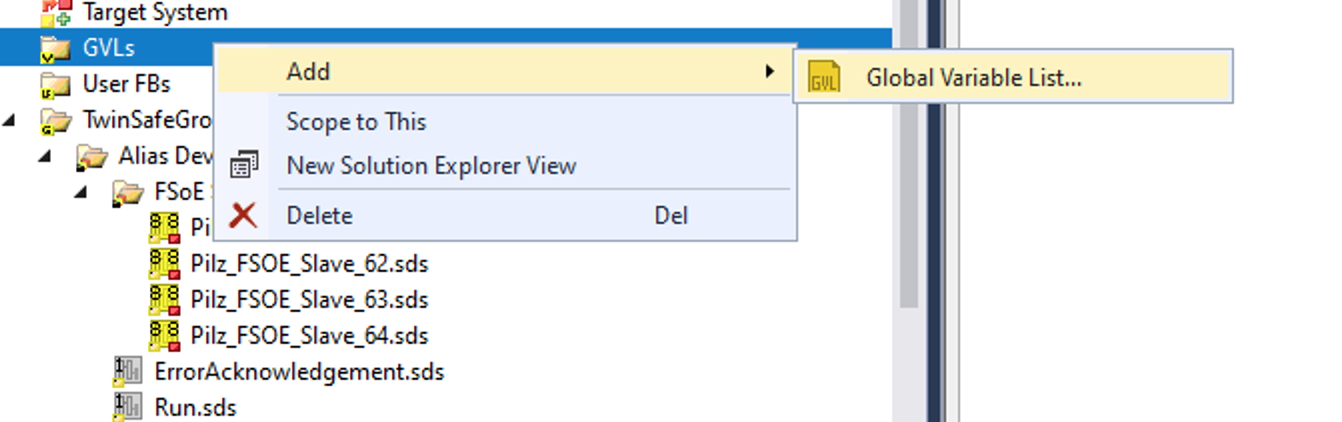
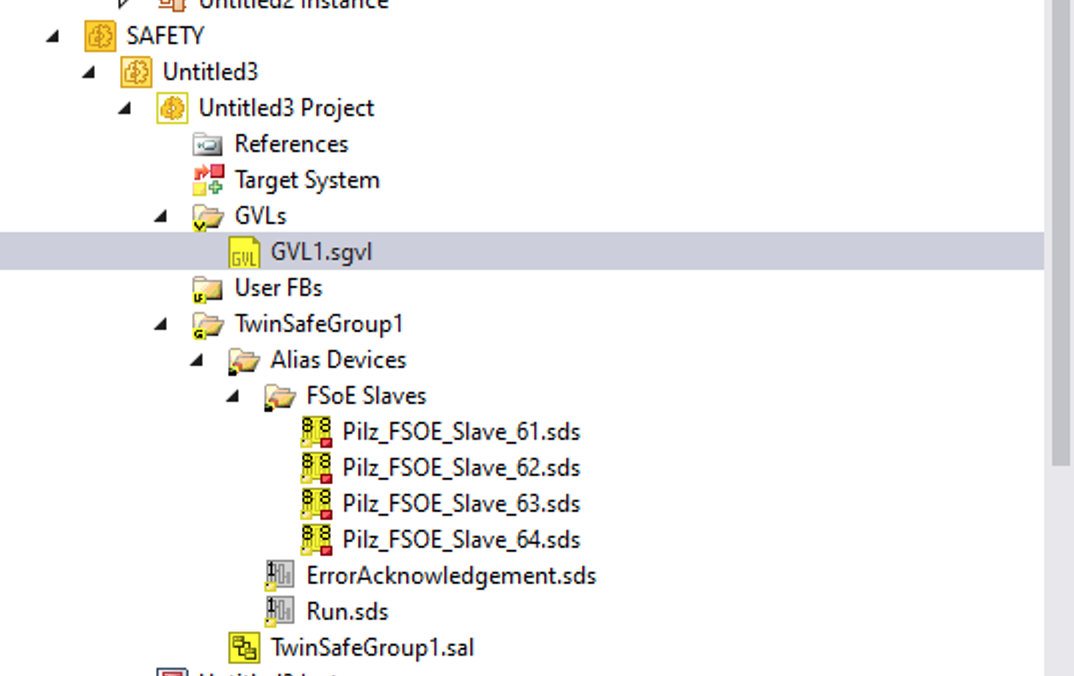
GVL
Add Global Variable List for TwinSAFE.
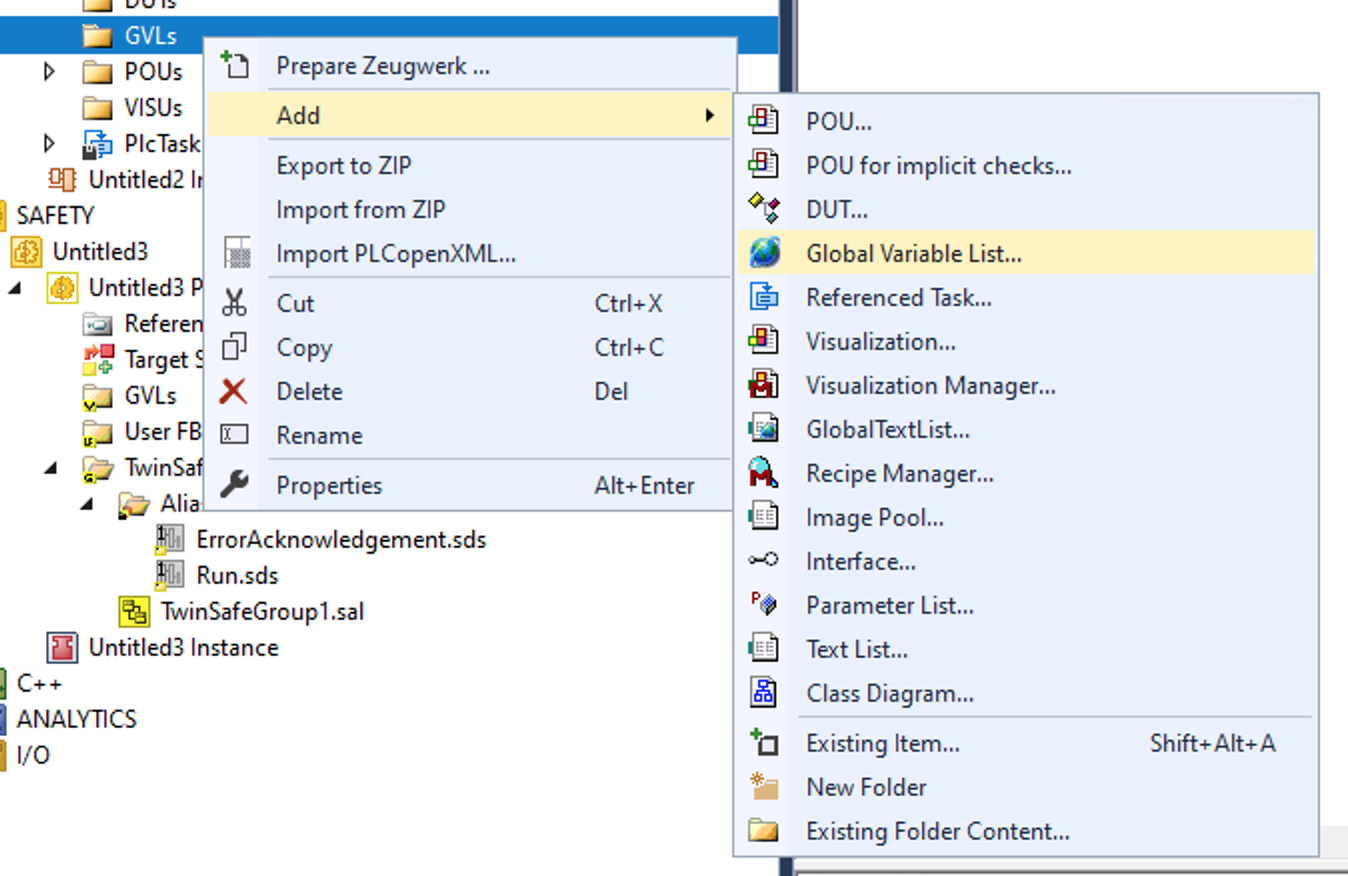
Enter a GVL name.
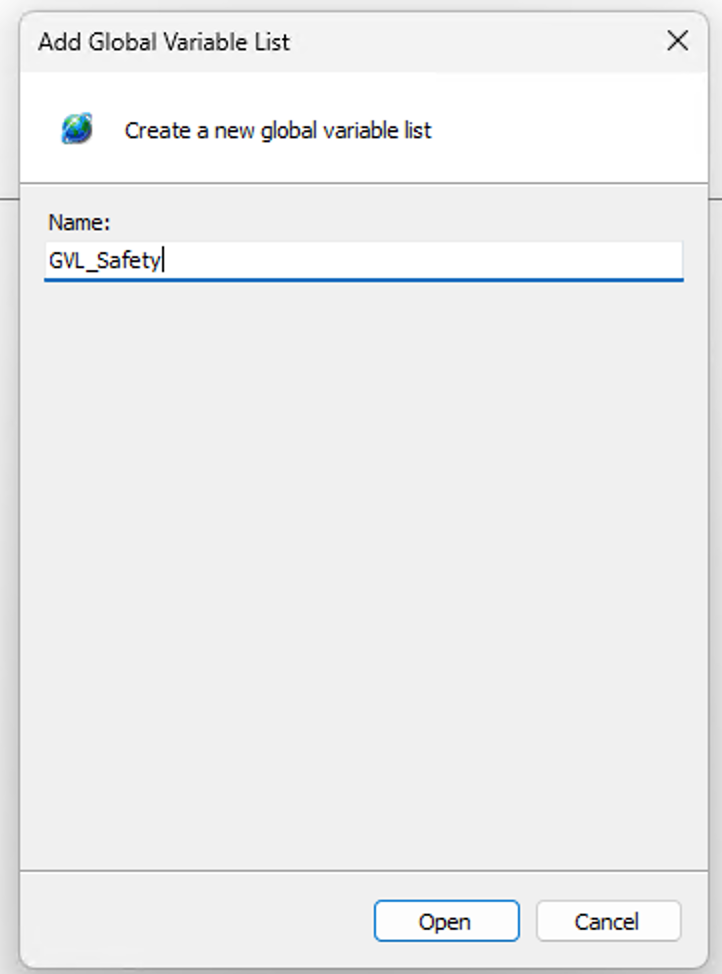
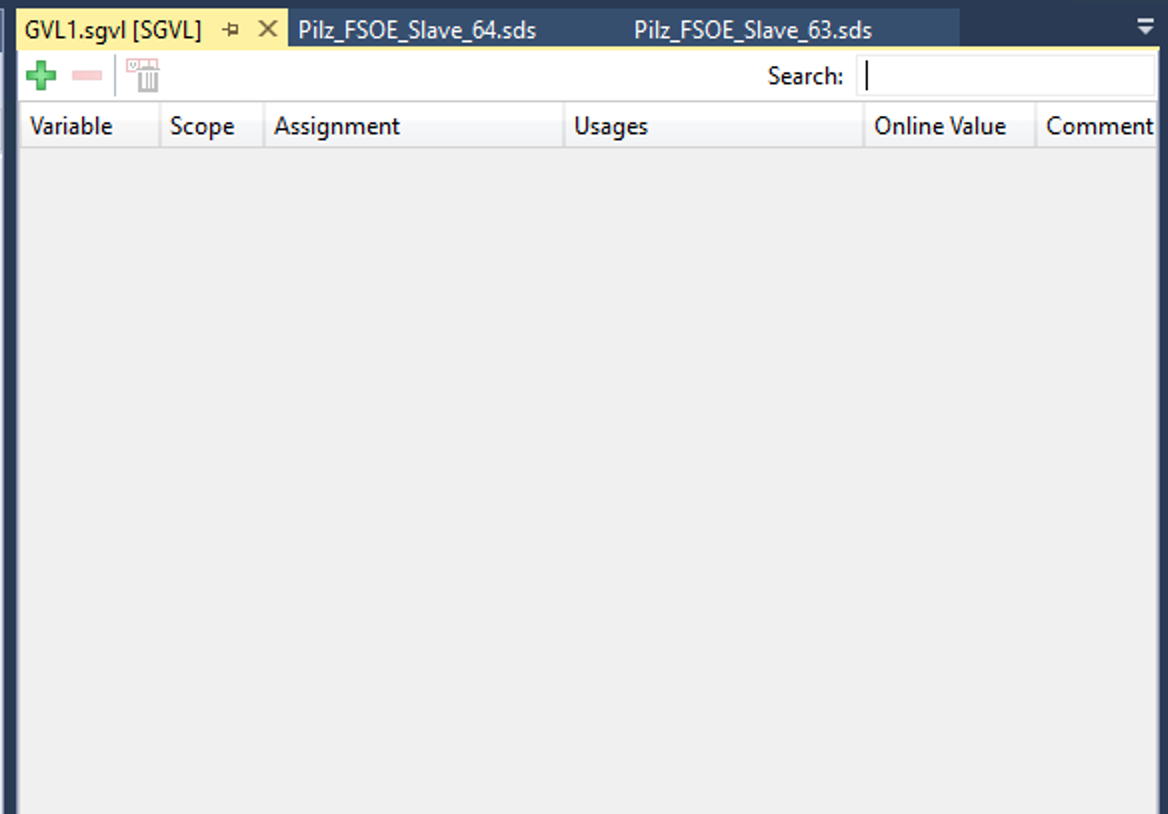
Defines error acknowledgement and startup output for the Safety program.
| VAR_GLOBAL ErrorAck AT %Q*:BOOL; Run AT %Q*:BOOL; END_VAR |
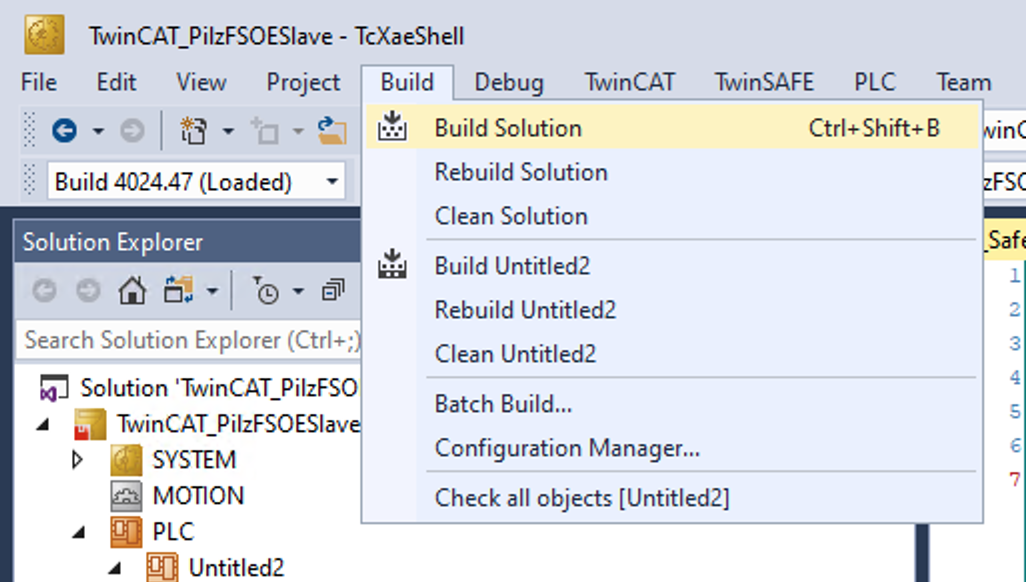
Build
Compile the project under Build>Build Solution.
Add Safety PLC
Next, go to SAFETY>Add New Item to add the Safety project.
Select TwinCAT Safety Project Preconfiguration Inputs and proceed with Add.
This project Template will pre-define the minimum required control variables for your Safety project.
Set Target to Hardware Safetuy PLC and press Ok to proceed.
Configure Target System
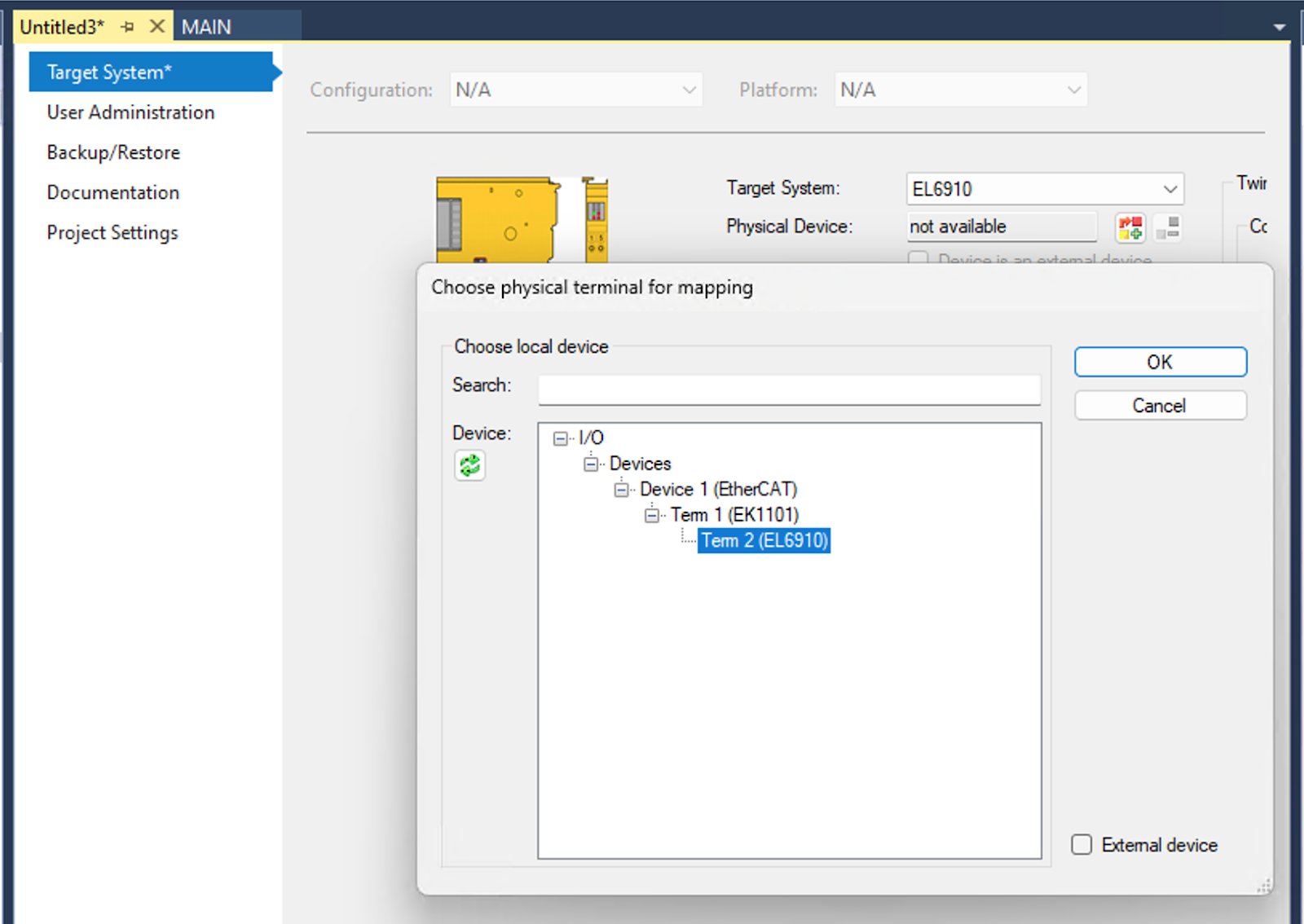
Open Target System and configure the EL6910 that will be used in this article.
This is the setting screen for the Target System.
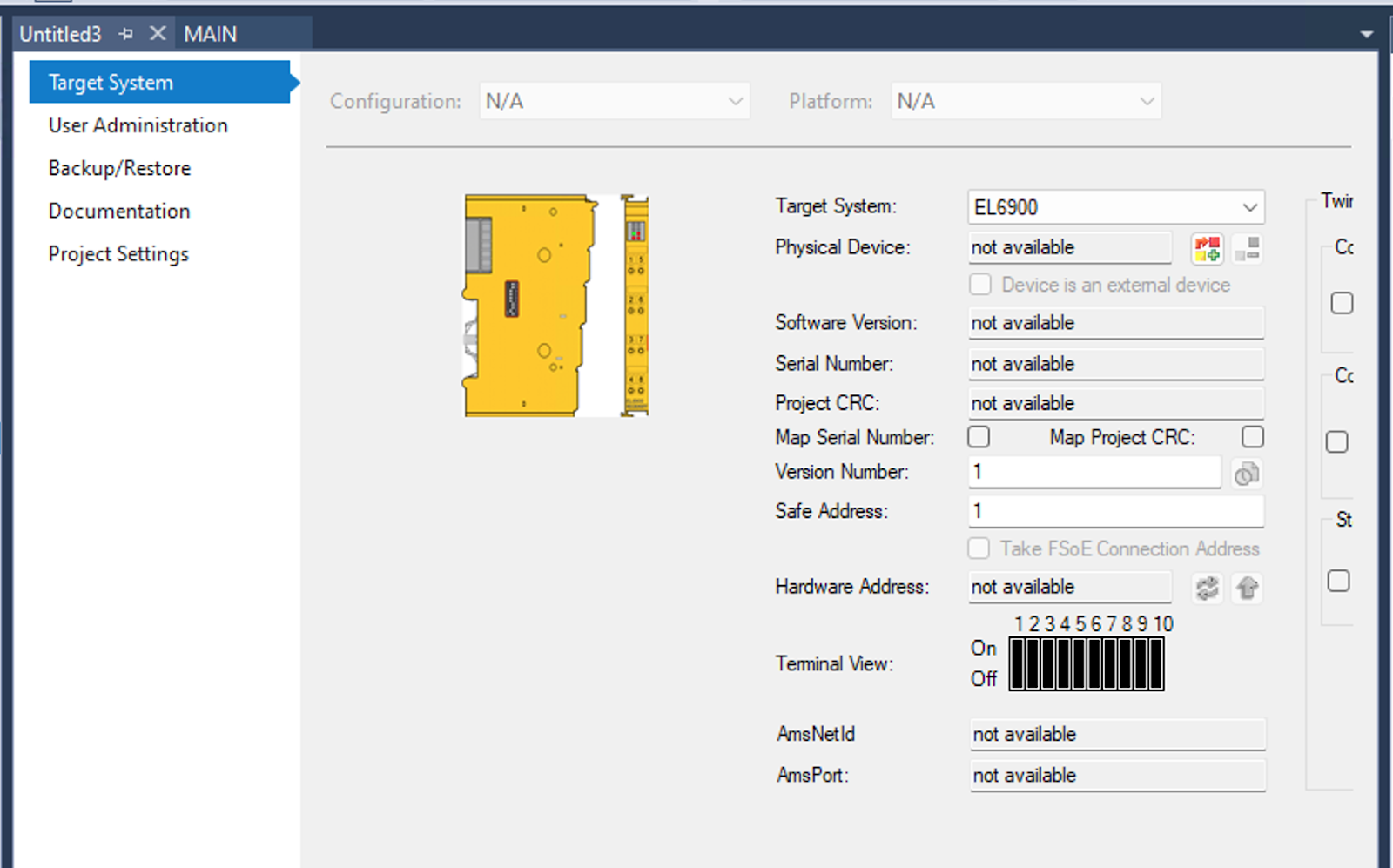
Target System
Select EL6910 from the Drop-List in Target System.
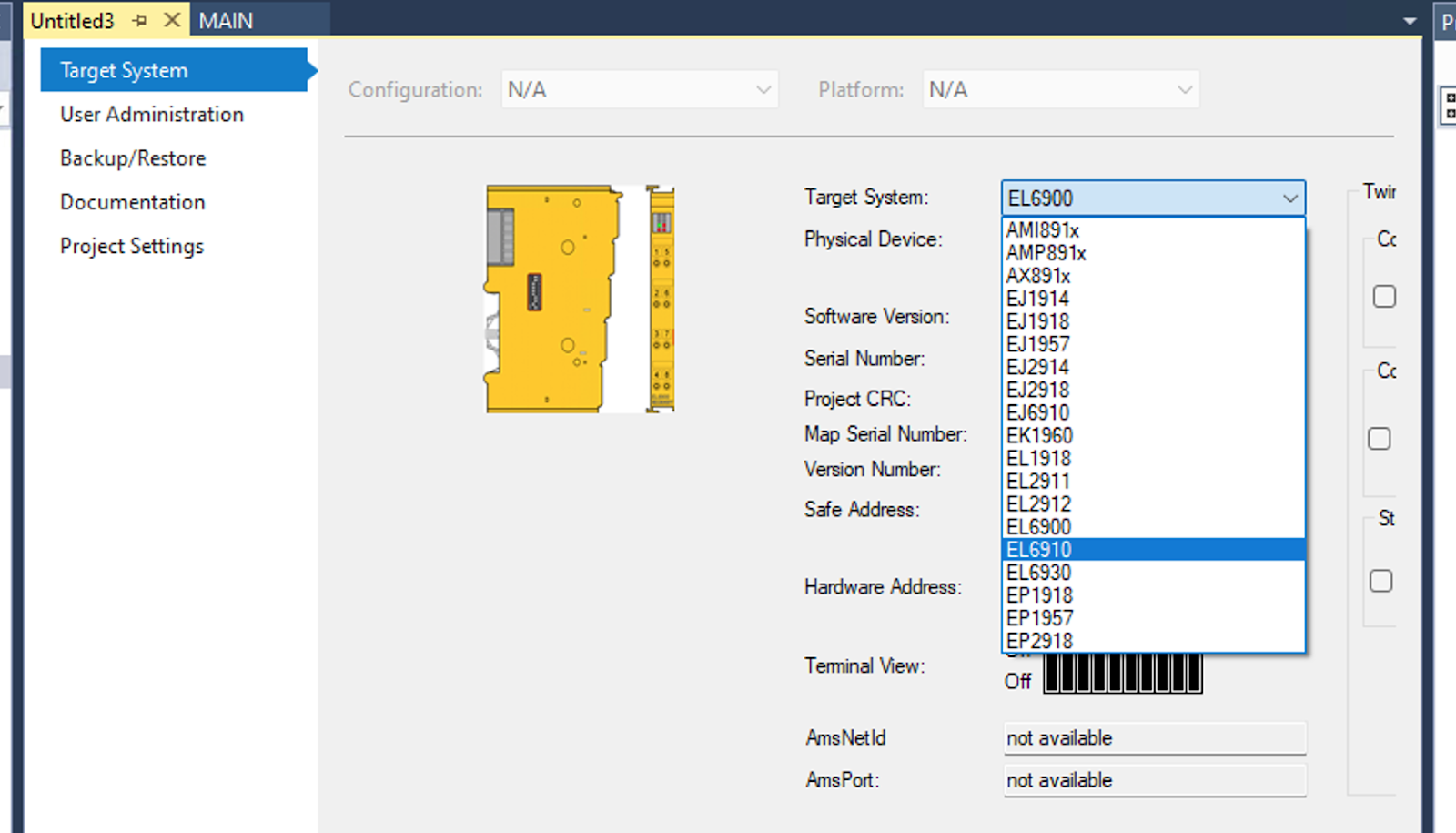
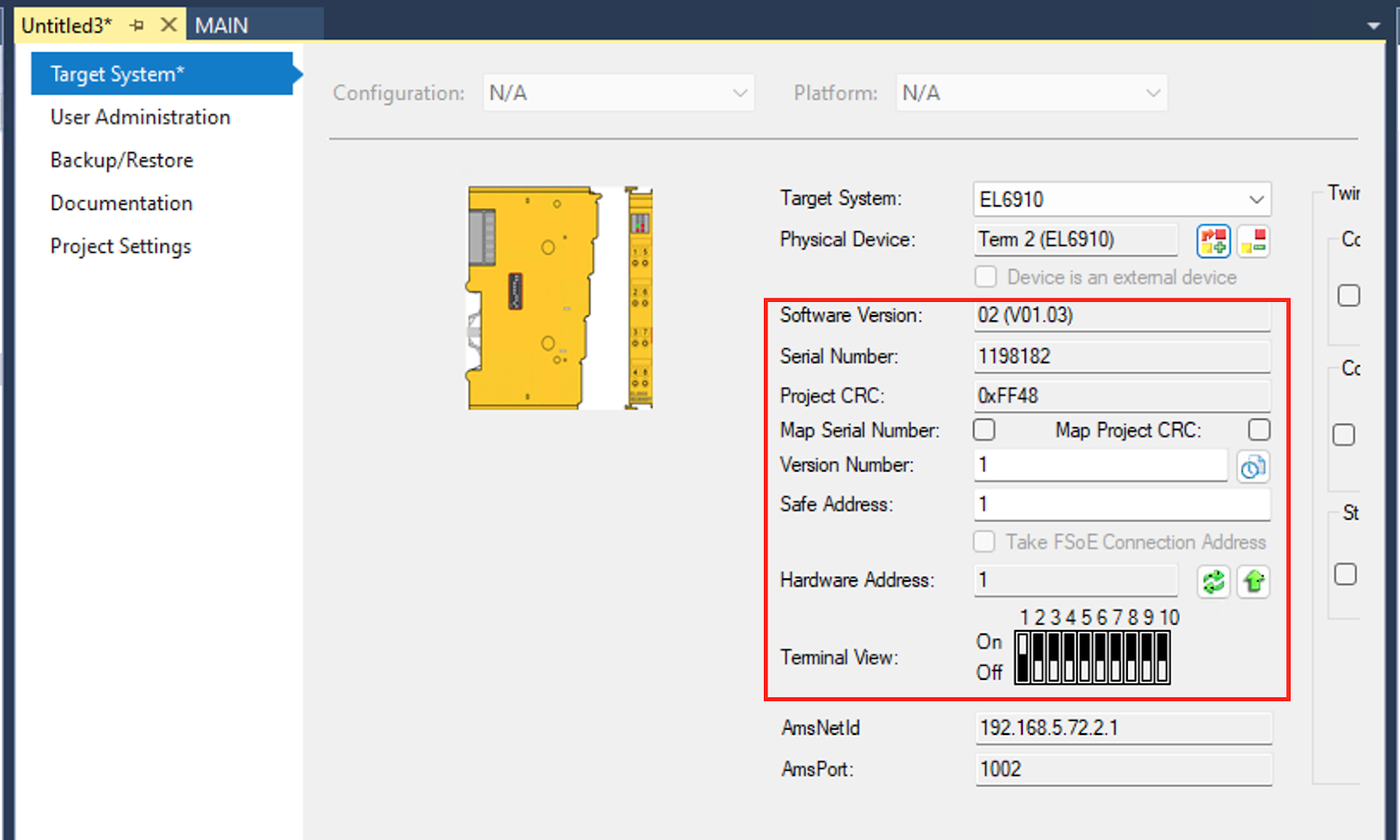
Configure the EL6910 for the EtherCAT network.
DoneEL6910 information was automatically retrieved via EtherCAT.
Configure Normal Input Slot
The next step is to build the non-safety data. Since we used the TwinCAT Safety Project Preconfguration Inputs Template when creating the Safety project earlier, the error acknowledgments and the non-safety inputs to run were automatically defined.
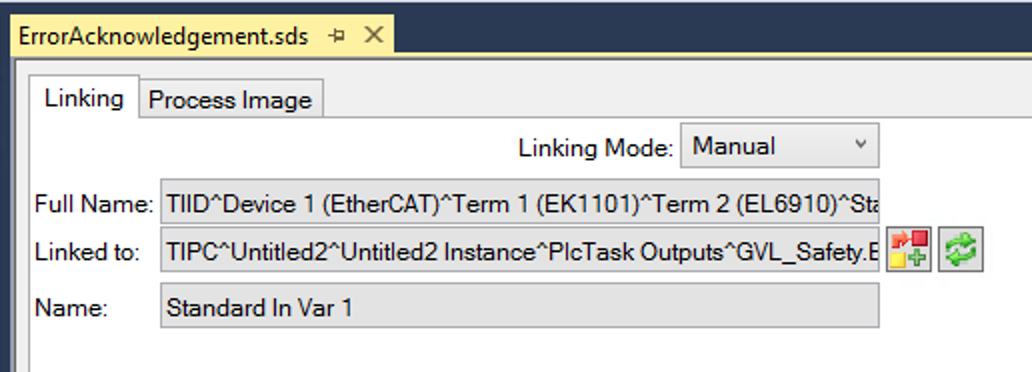
ErrorAcknowledgement
The first step is to set the ErrorAcknowledgement.
Click the + button next to Linked to.
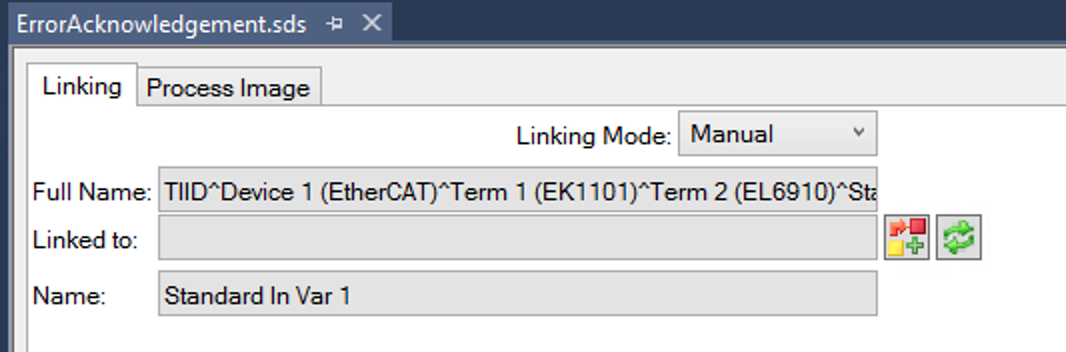
Let’s tie it to the ErrAck variable we defined earlier in GVL.
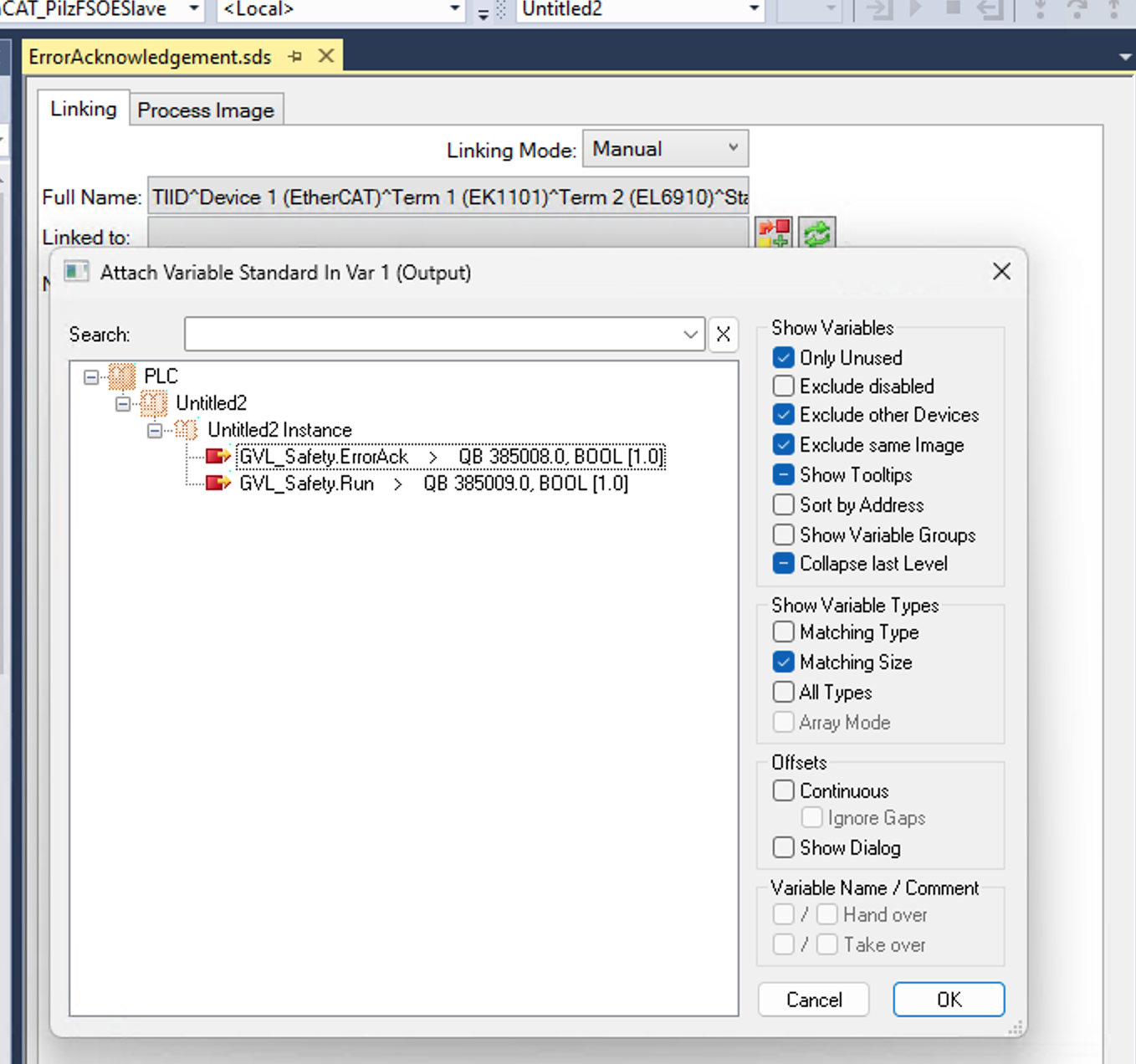
Done!
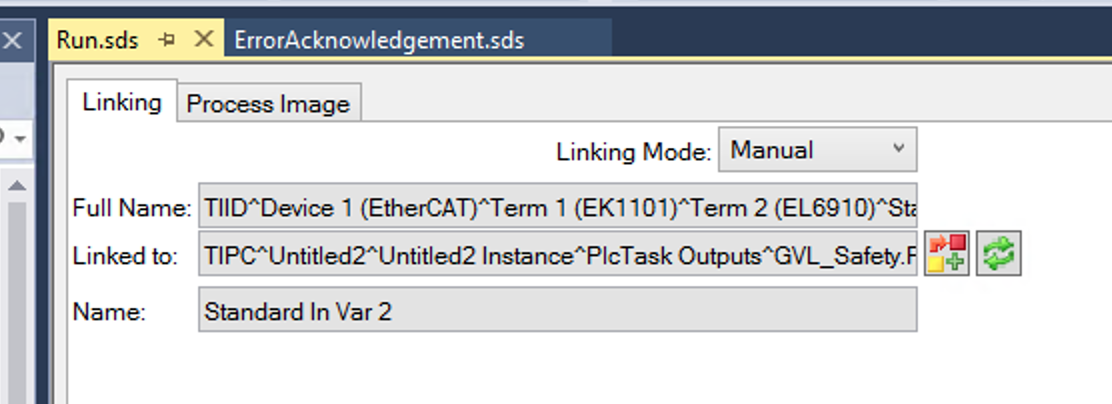
Run
The next step is to set the Run signal for the non-safety input.
Click the + button next to Linked To.
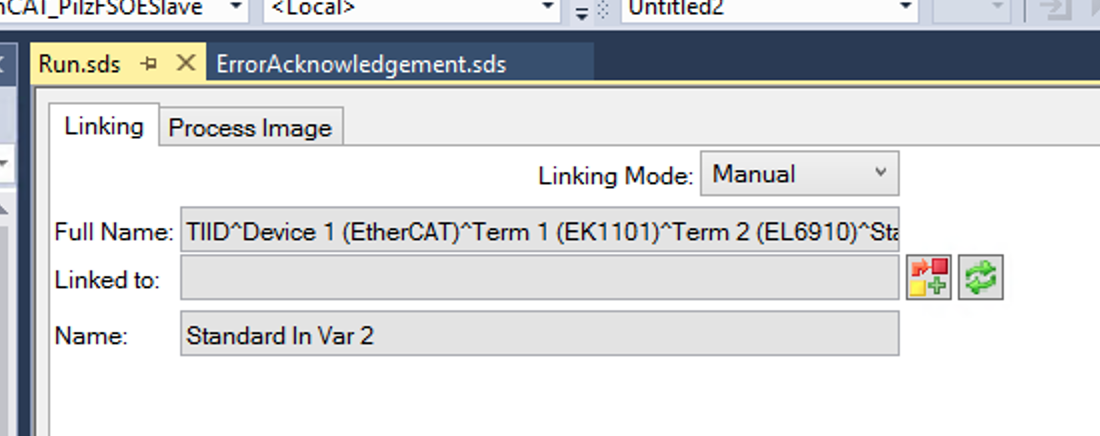
Let’s tie this to the Run variable we defined earlier in GVL.
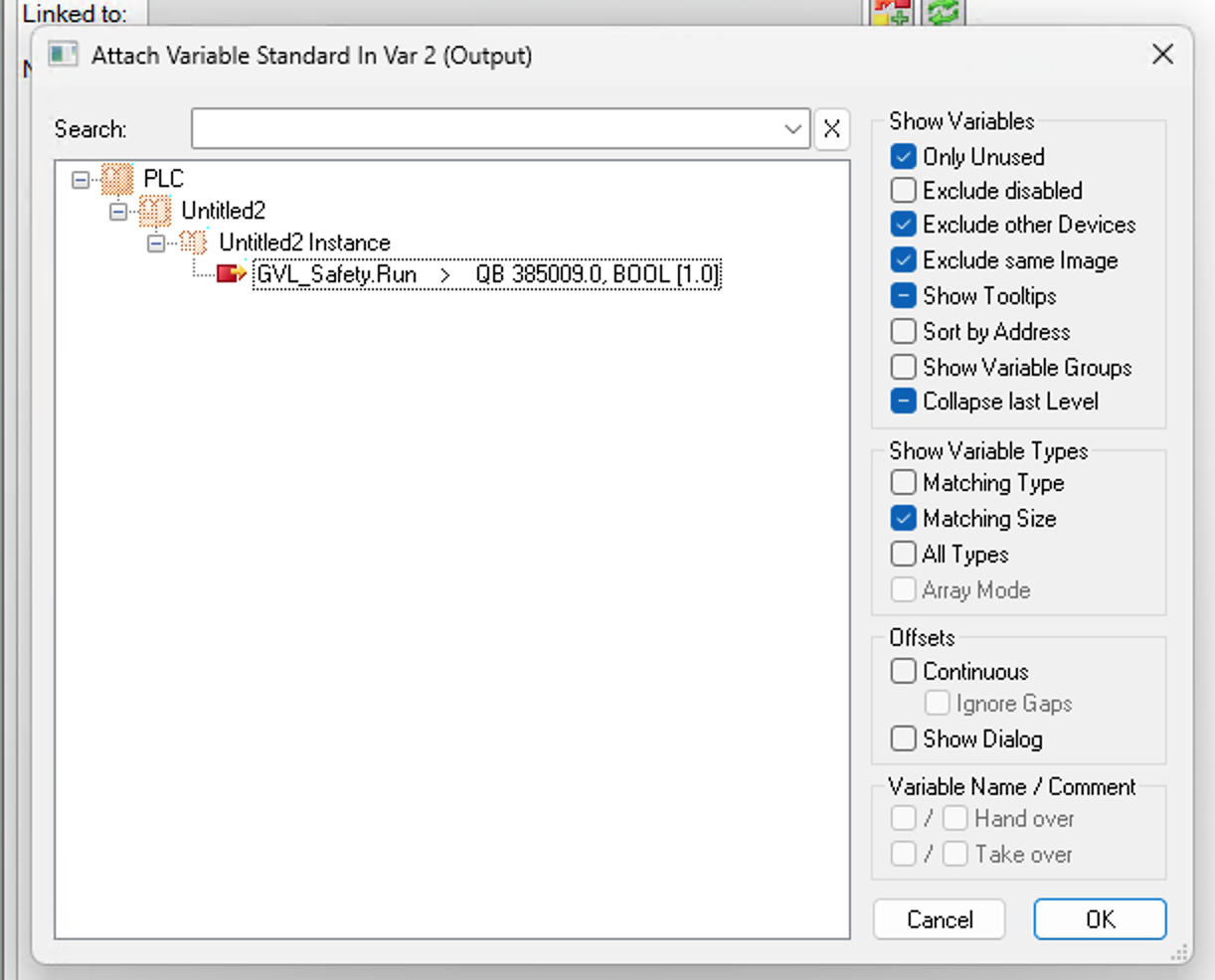
Done!
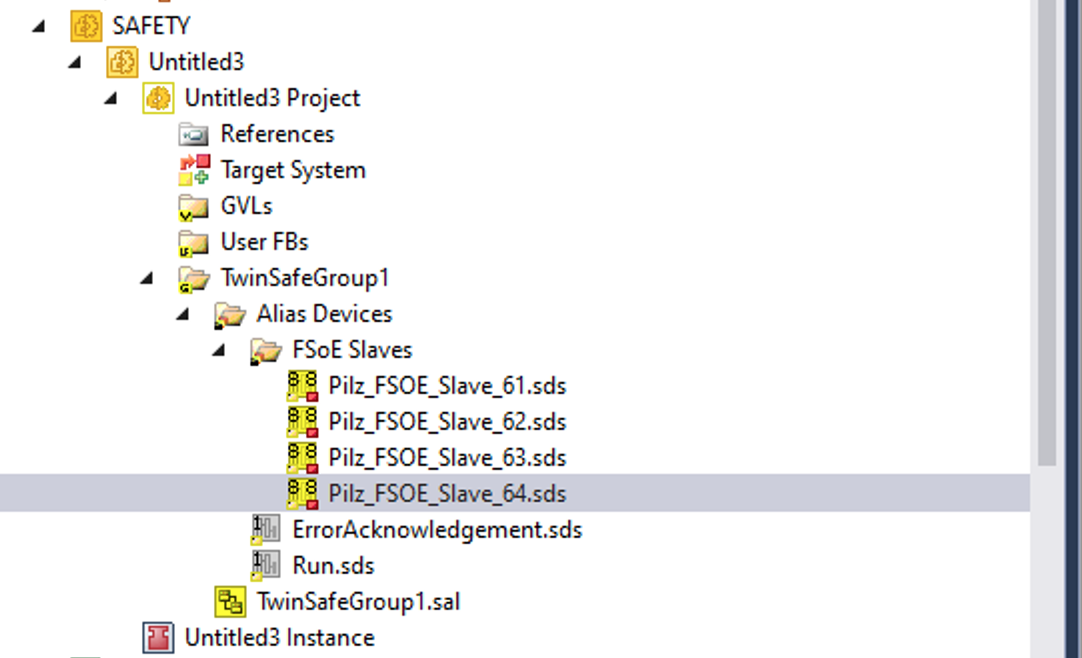
Configure Safety Slots
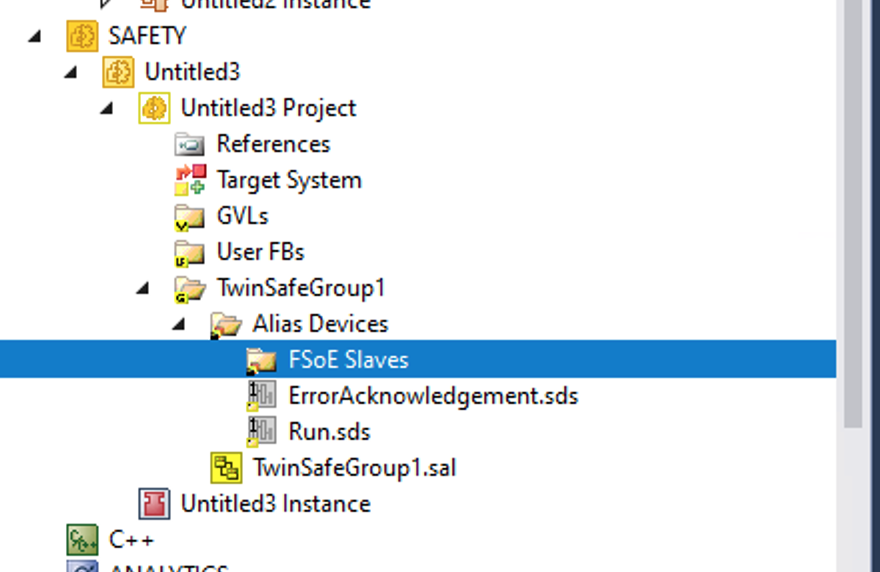
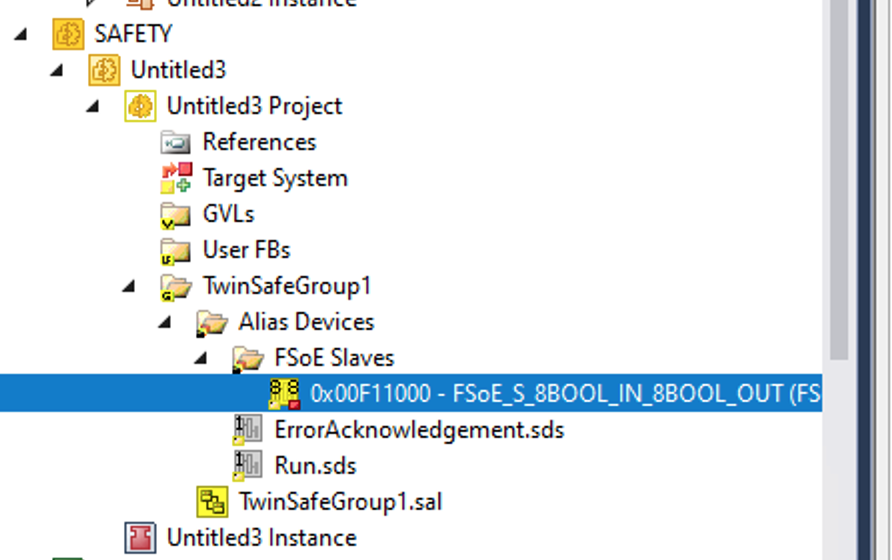
Next we will build Pilz’s FSoE Slave Connection, adding a new Folder to Alias.
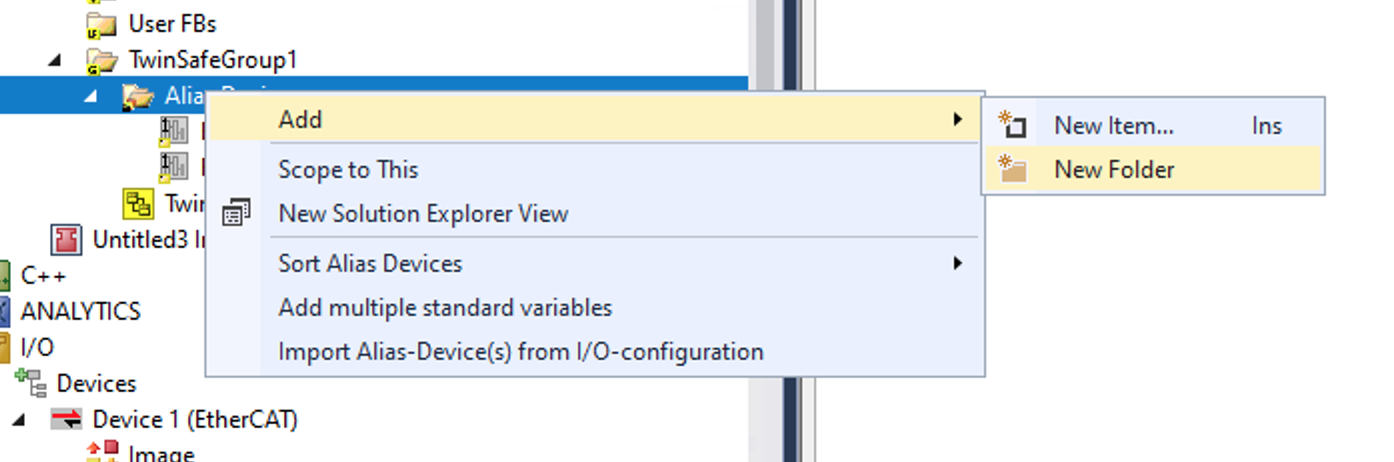
As the network grows, it will be easier to understand if Slave is separated by Folder.
Right click on the Folder you just added>Add>New Item.
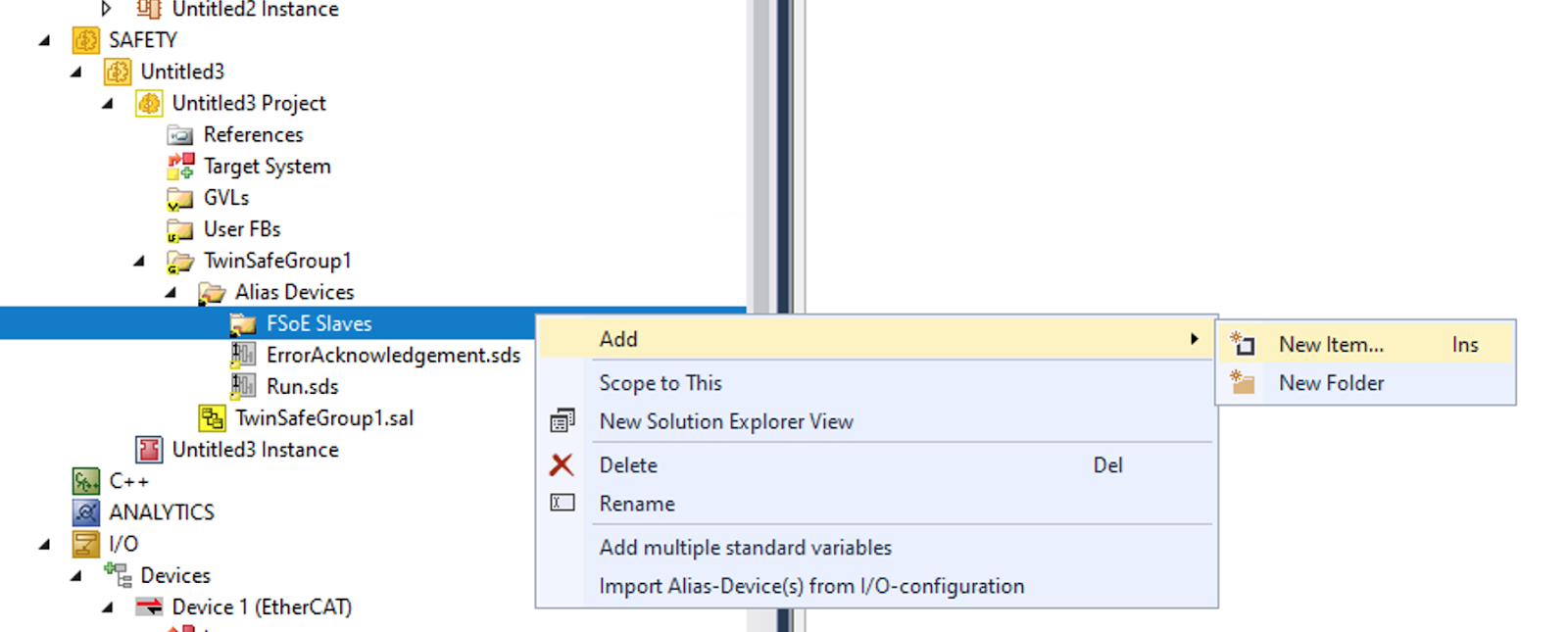
Select Safety>Pilz GmbH & Co>0x00F11000 and add FSoE Connection with >Add.
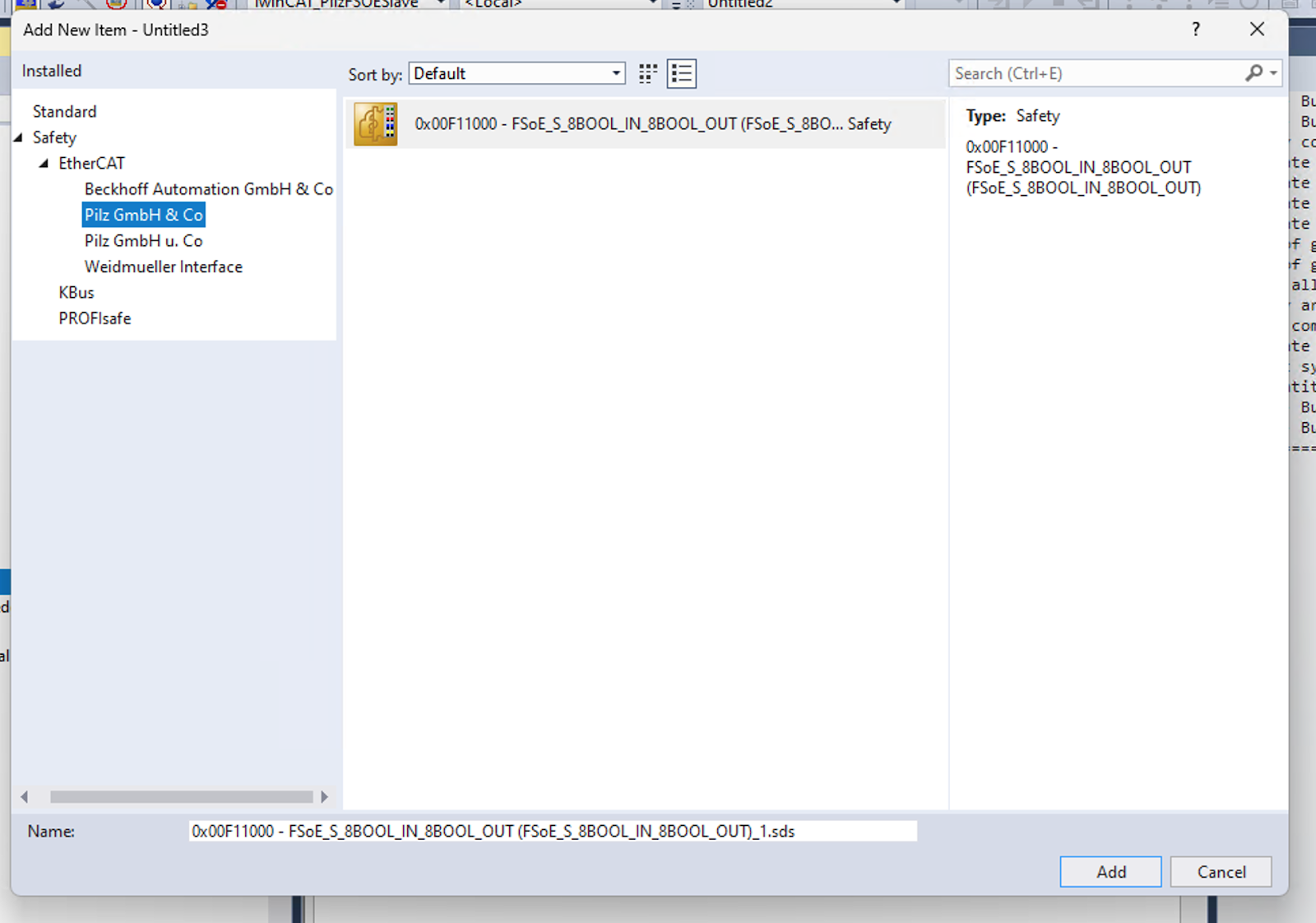
Done!
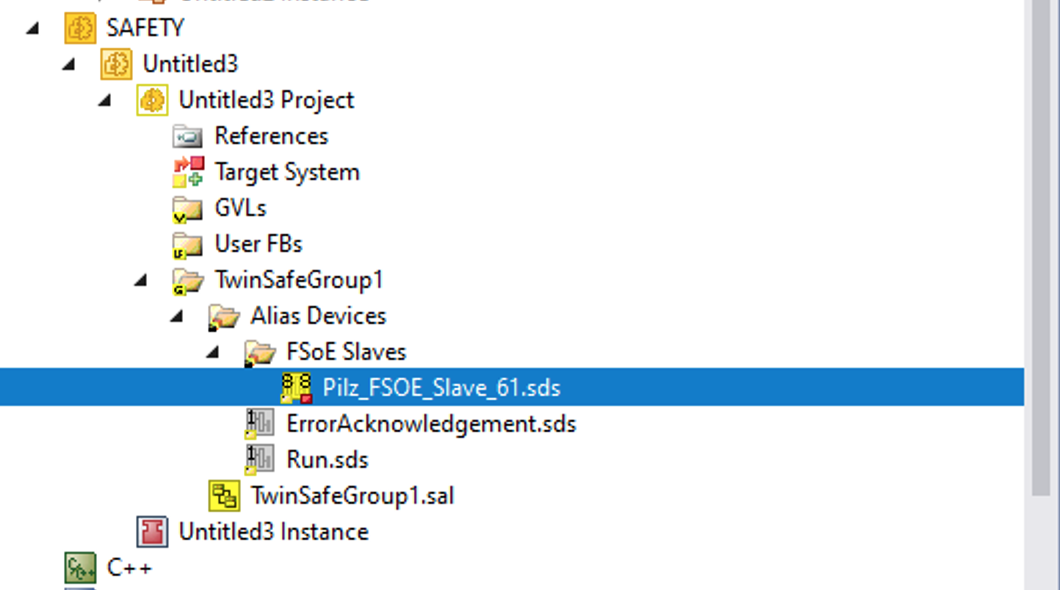
Set an easy-to-understand name for each Connection. Next, double-click on the relevant Connection and configure the settings.
Click the + button next to Physical Devices.
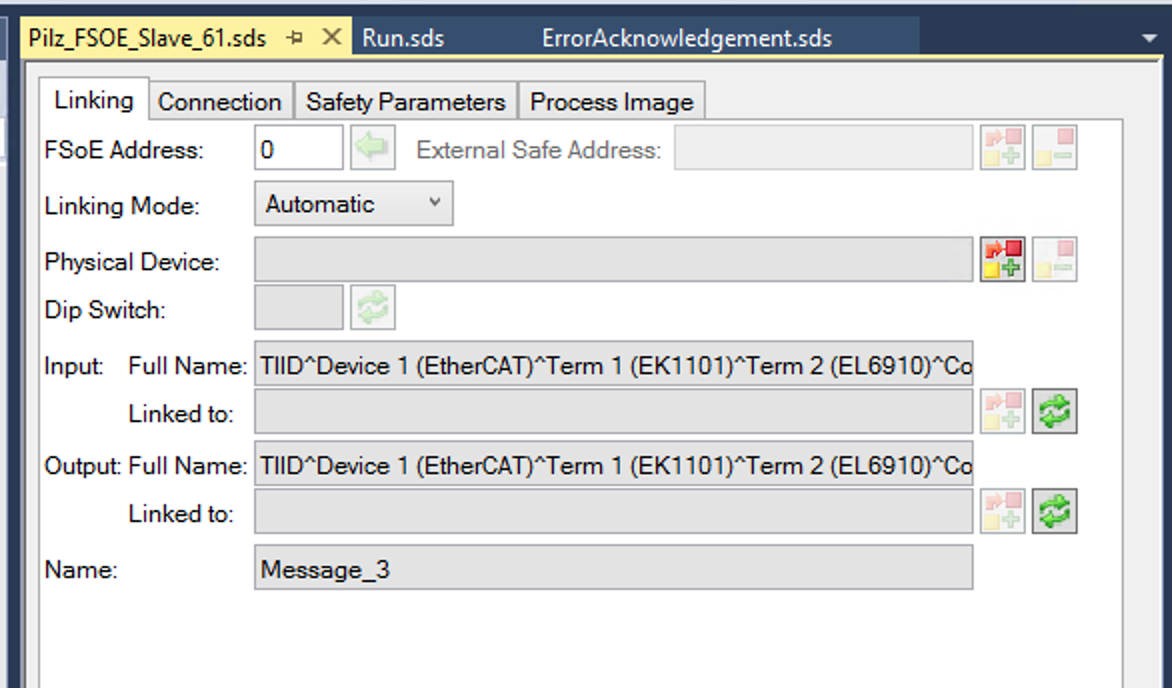
Let’s Link it to a Slot of a Pilz module in the EtherCAT network.
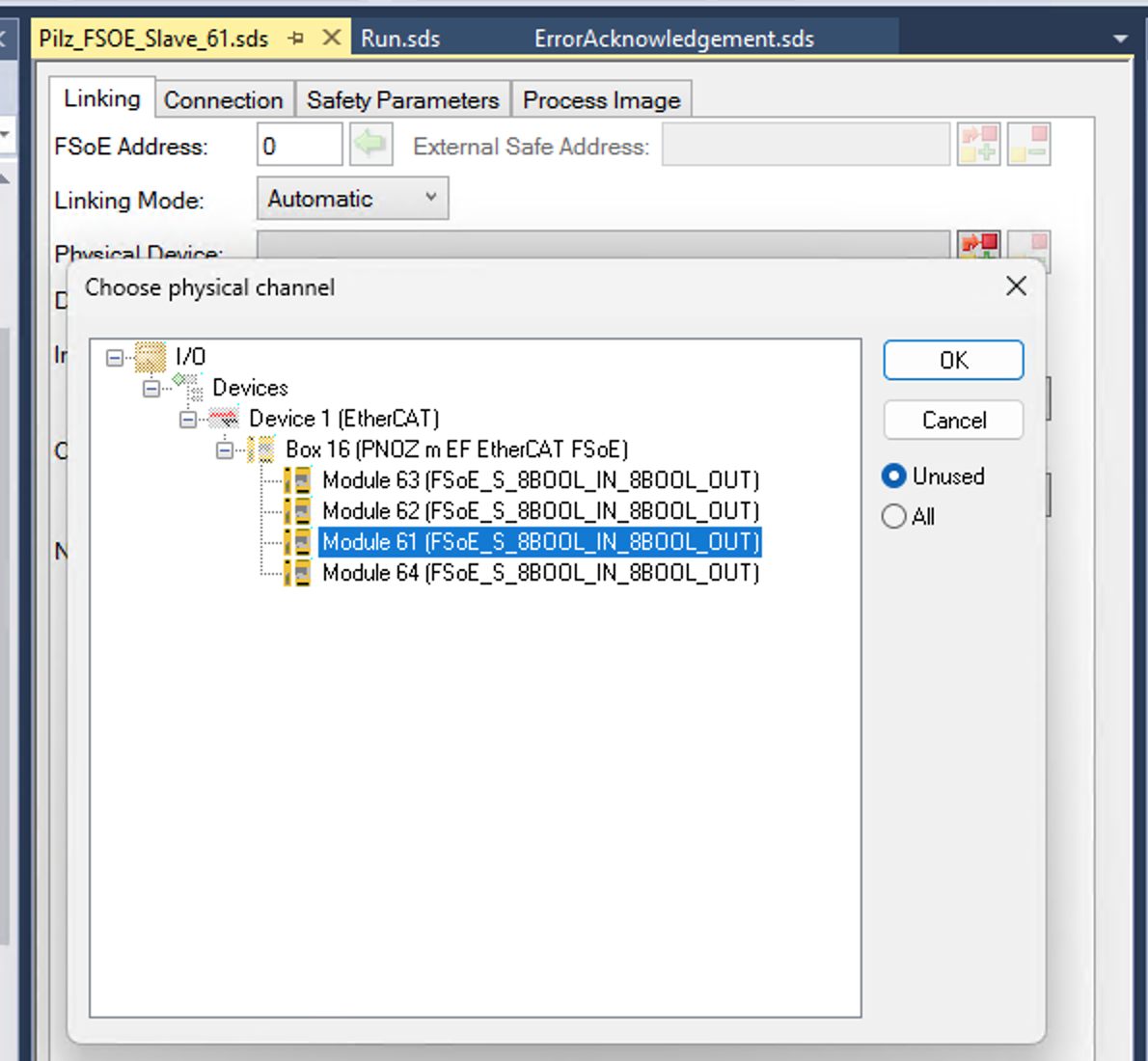
Done!
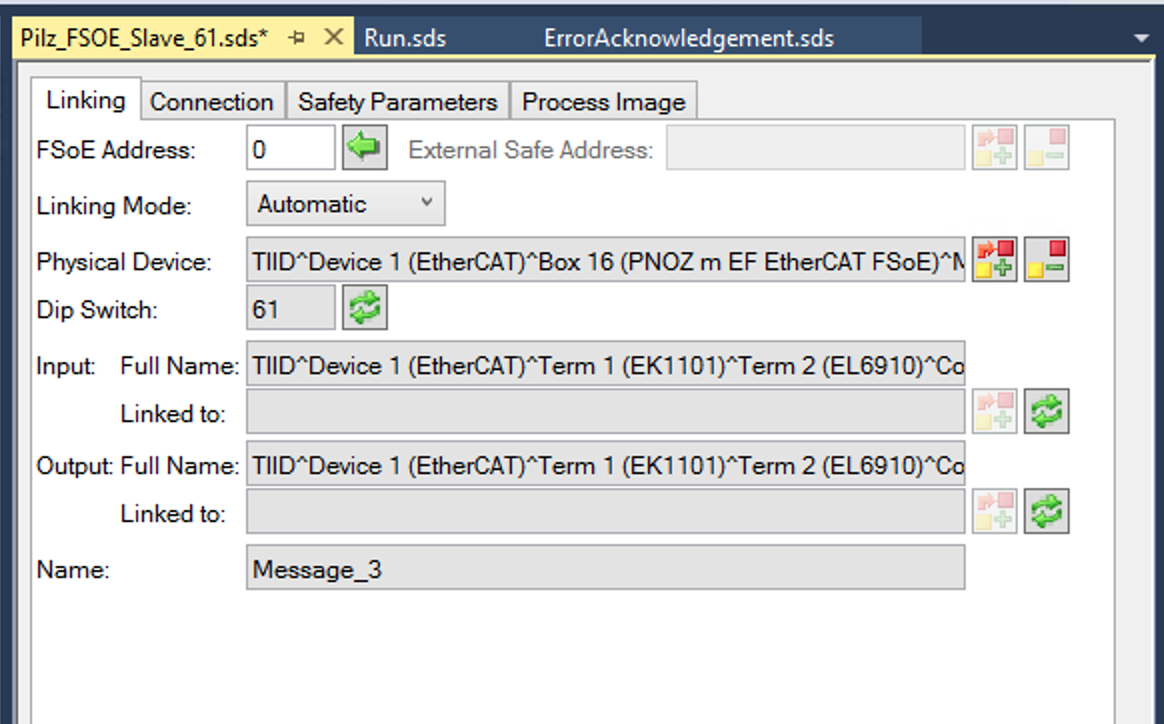
Of course, don’t forget to set the FSoE address.
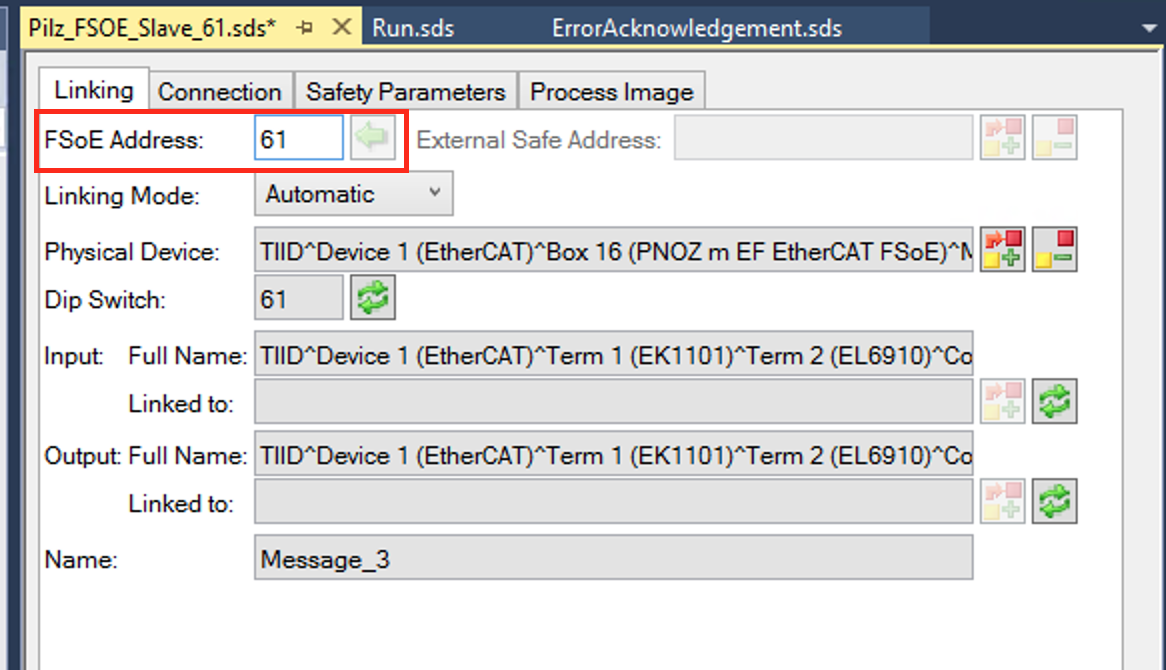
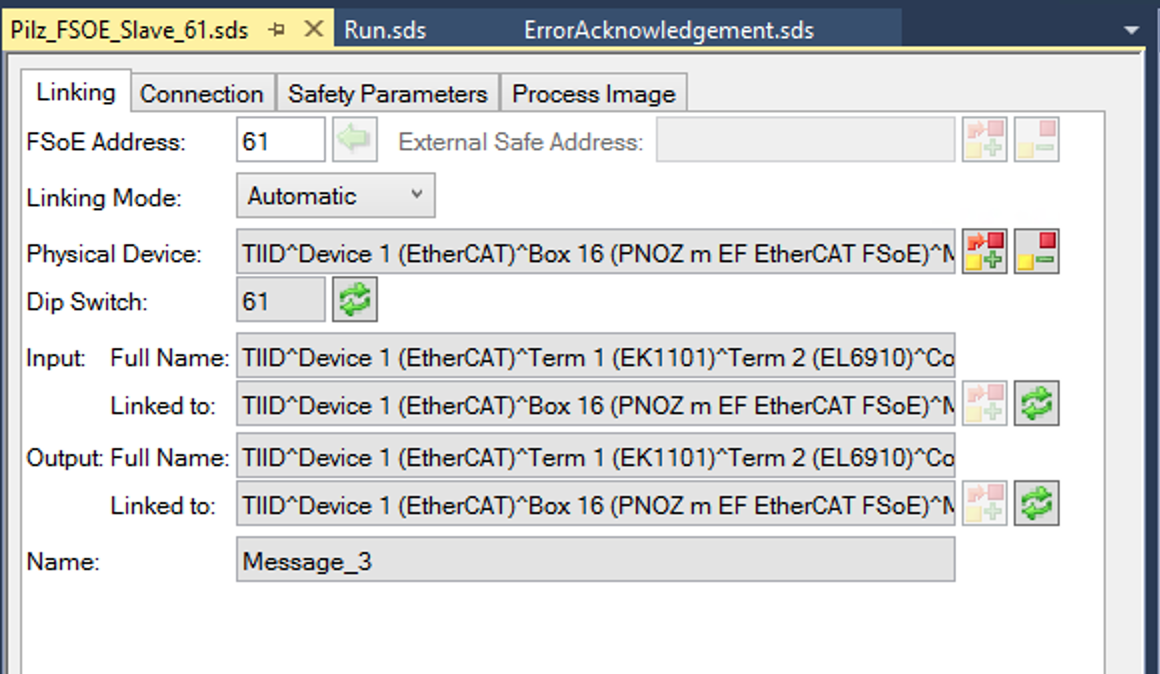
Once the project is saved, items such as Input/Output are automatically reflected.
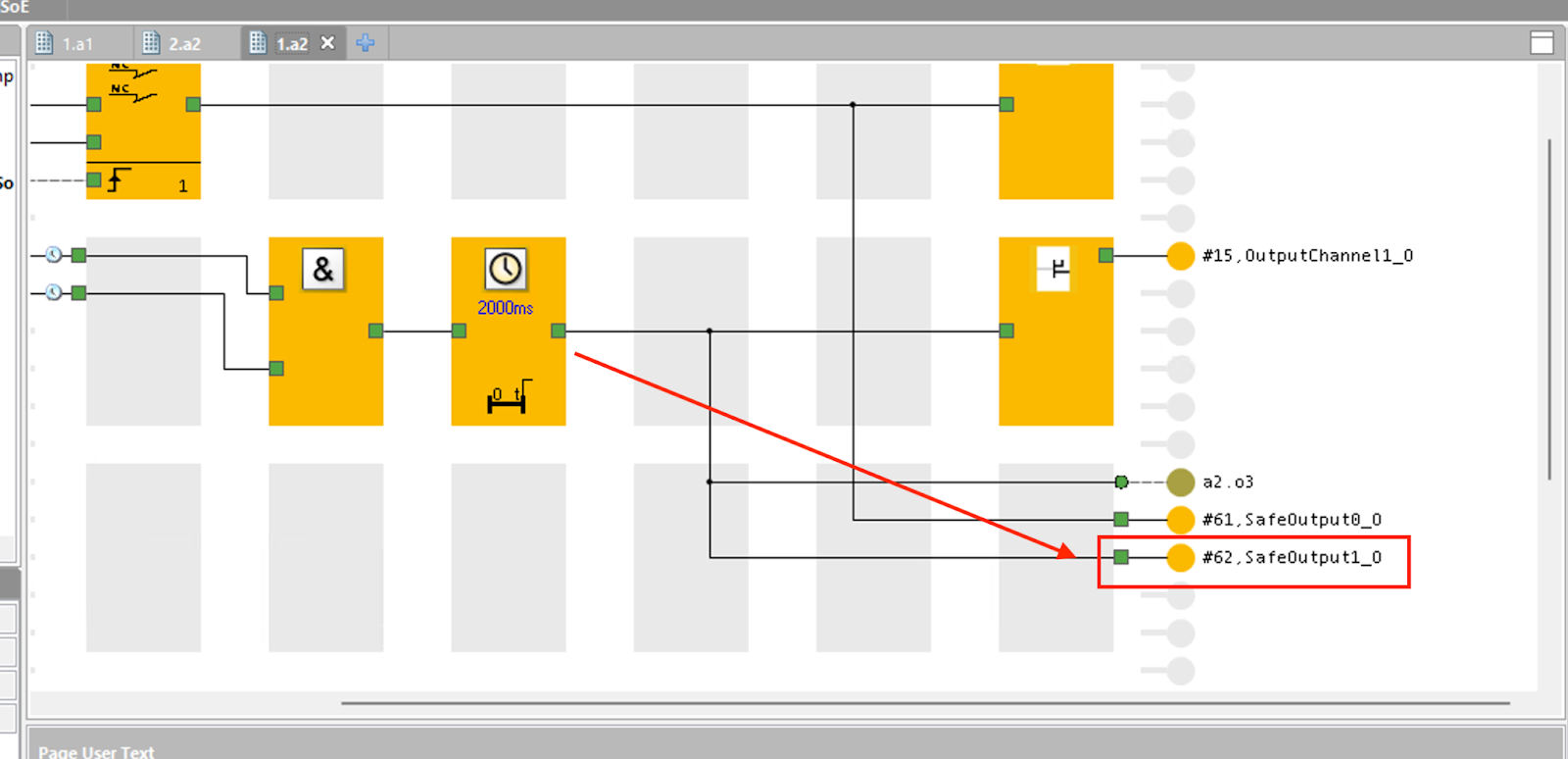
Now we can Set up FSoE Slave connections 62 through 64 using the previous operation.
Add Safety Global Variable List
This time, GVL is added to link the data acquired by FSoE Connection to the Global Variable List.
This is the GVL setup screen.
New variables can be added by clicking the + button.
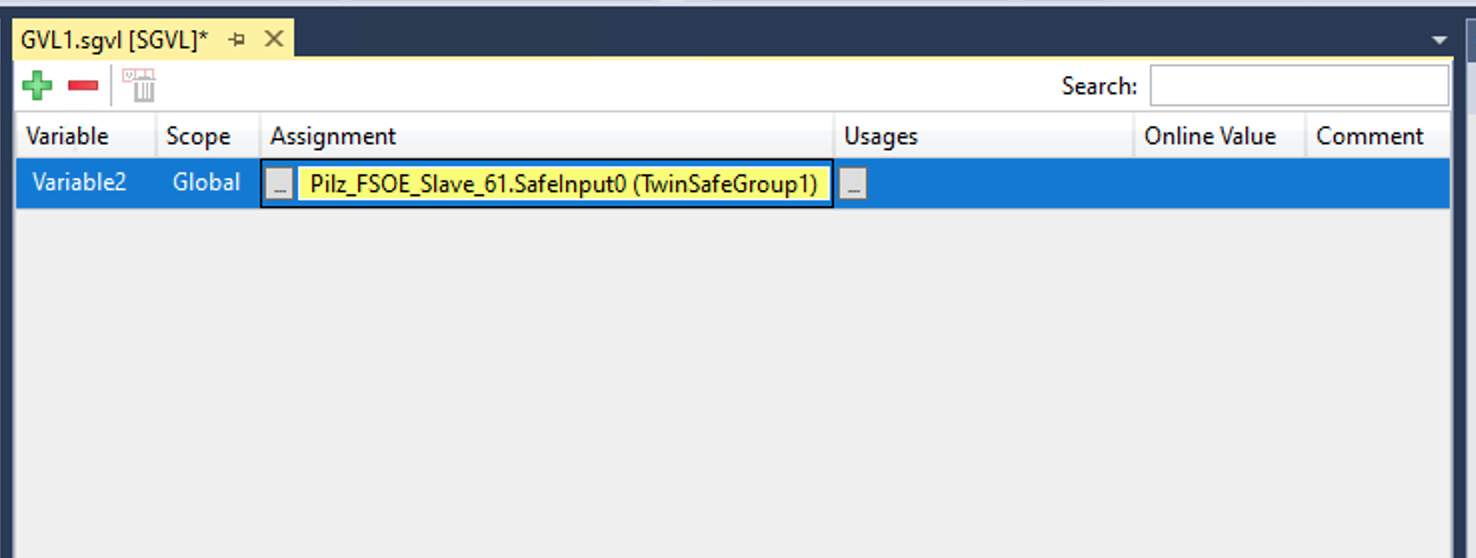
Now click on the … button in Assignment.
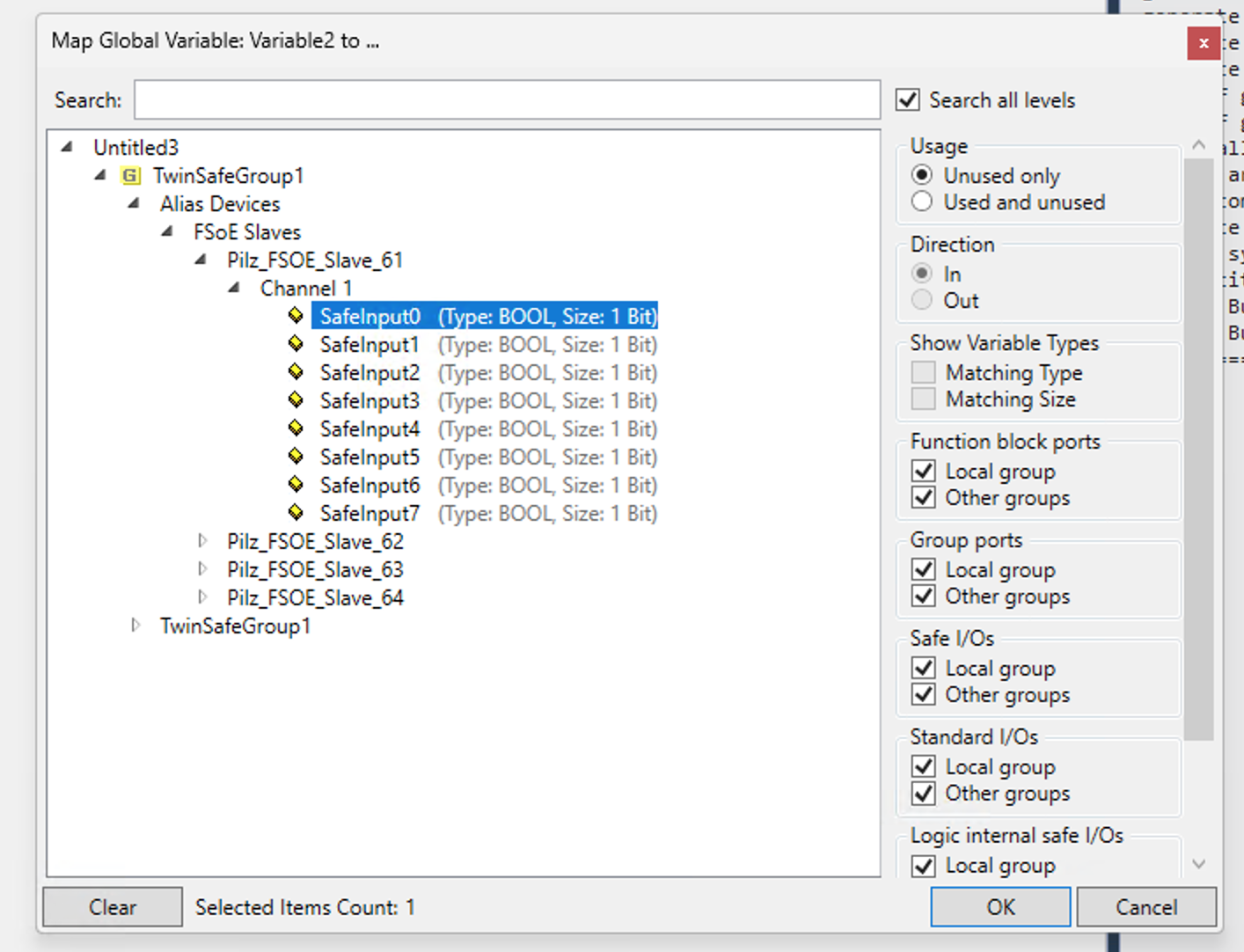
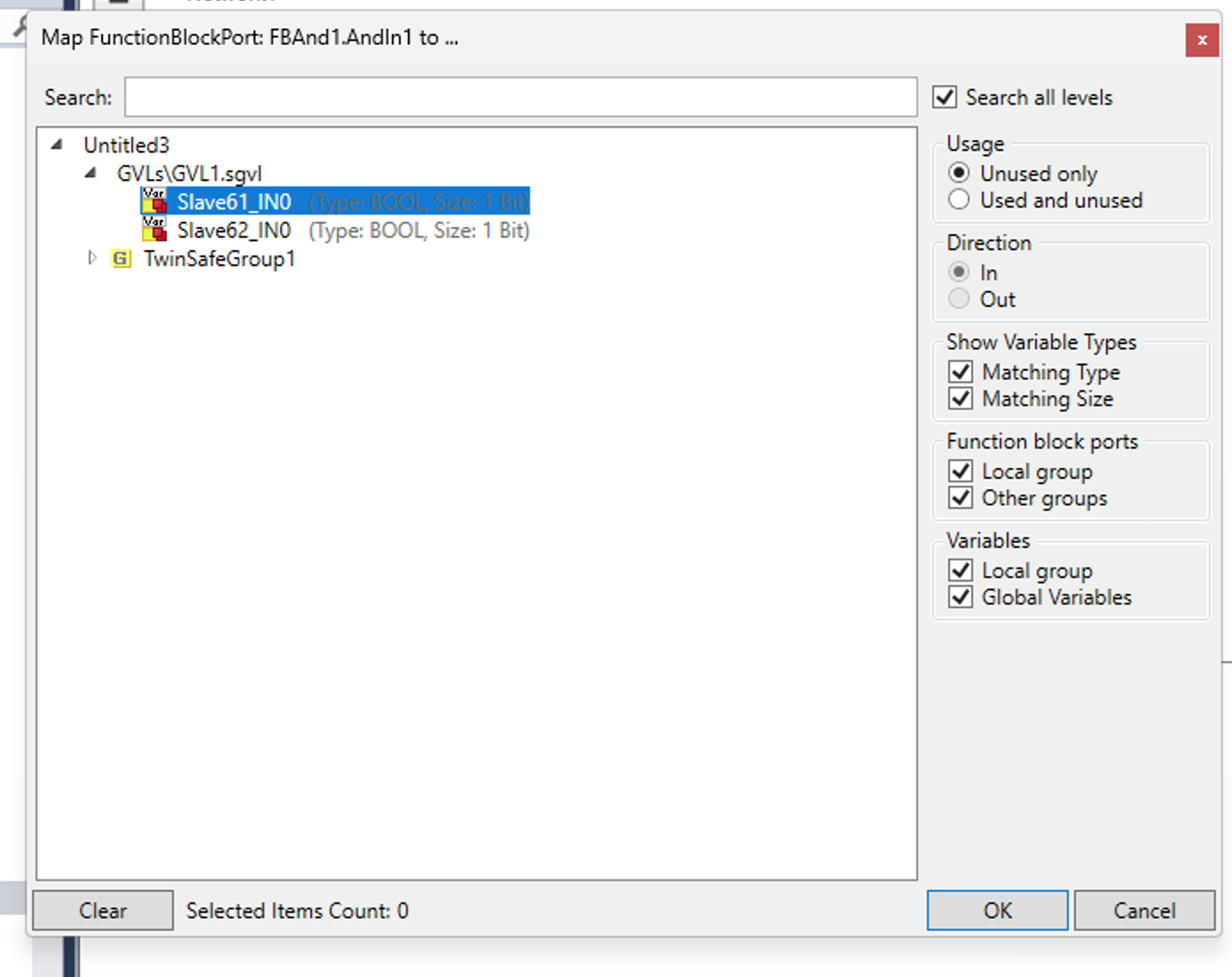
The Mapping screen for variables is displayed.
Mapping with the 0️th Bool data of FSoE Slave address 61.
Done!
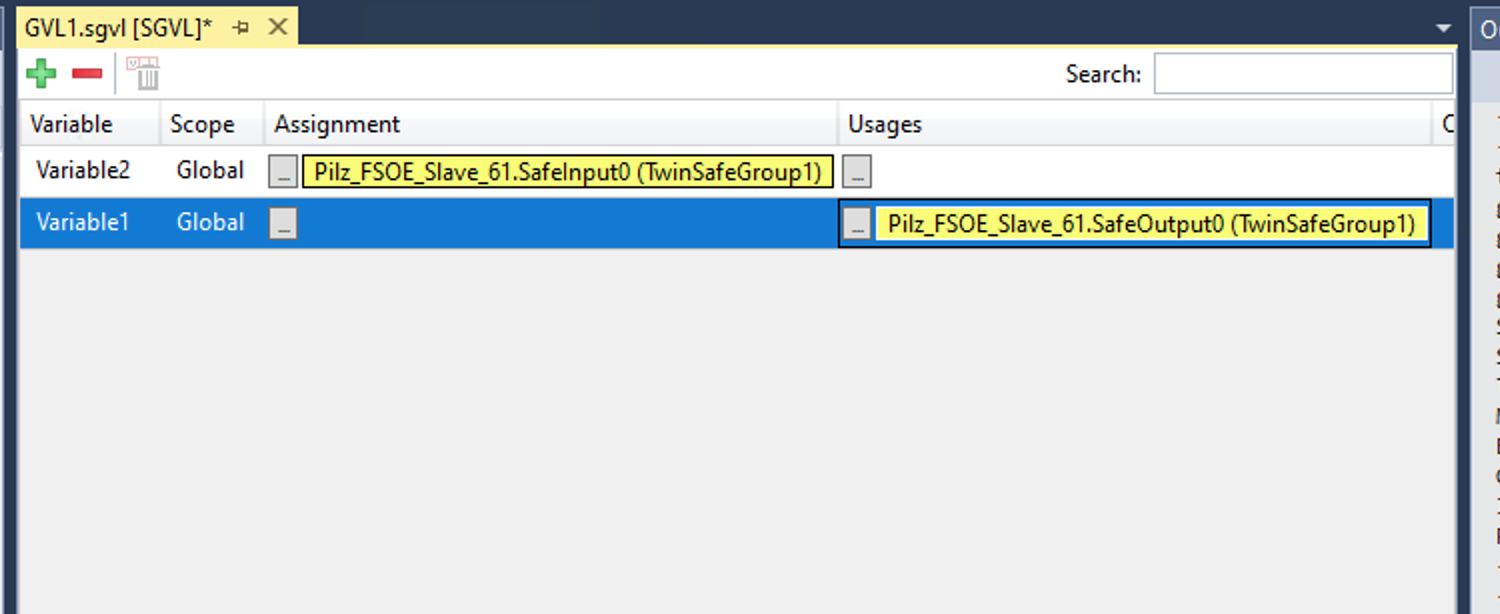
To Mapping the output data, click on the … button under Usages.
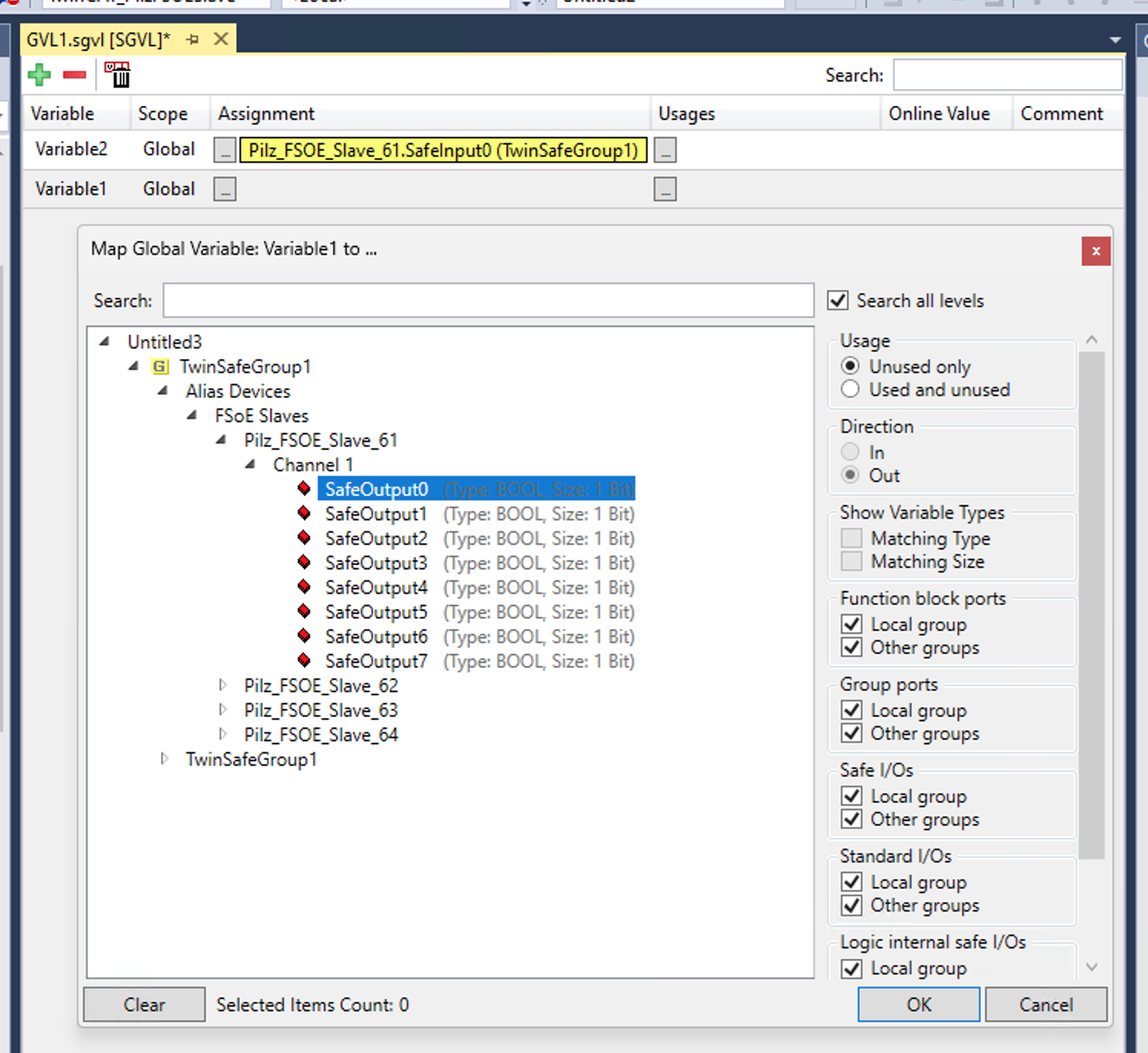
Done!
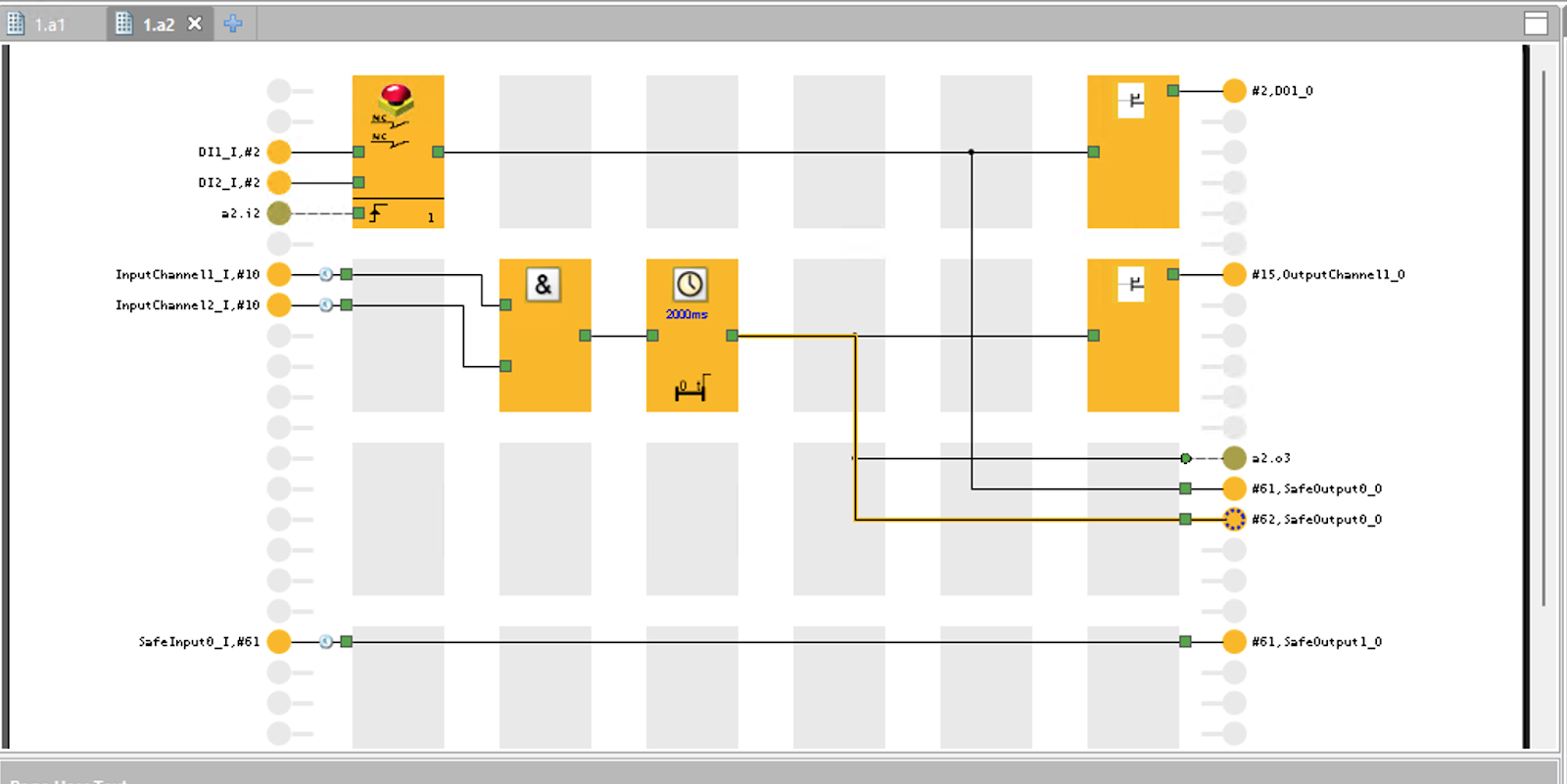
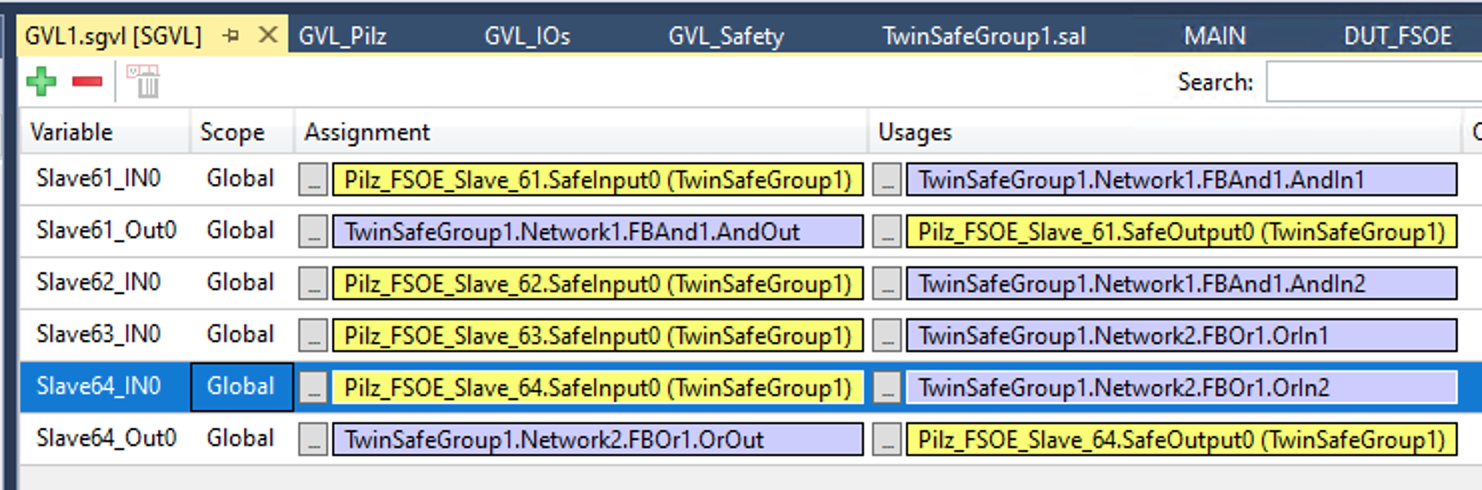
These are the variables used in this article,will be four input data and two outputs.
Safety Program
The final step is to create a simple Safety program.
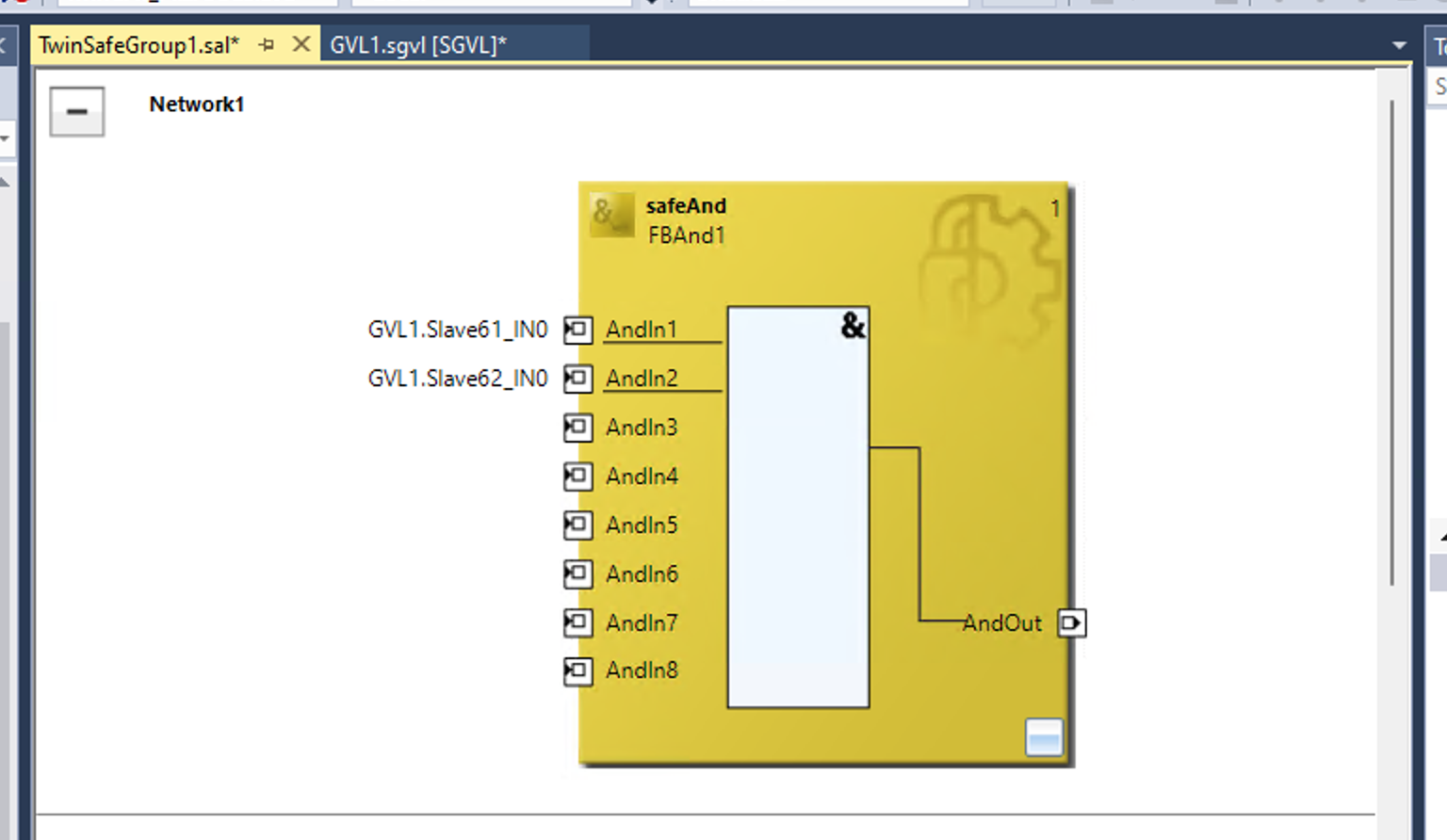
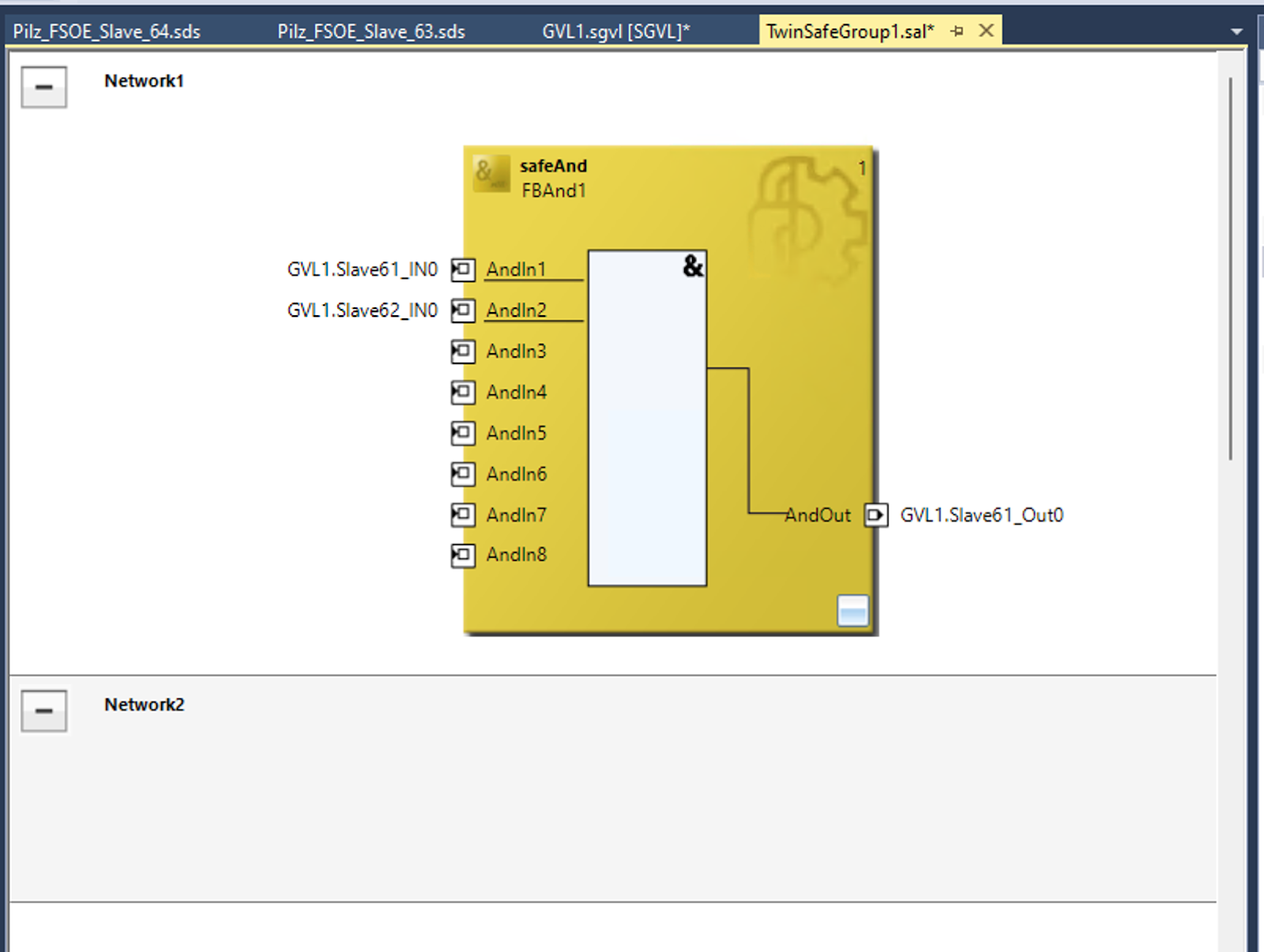
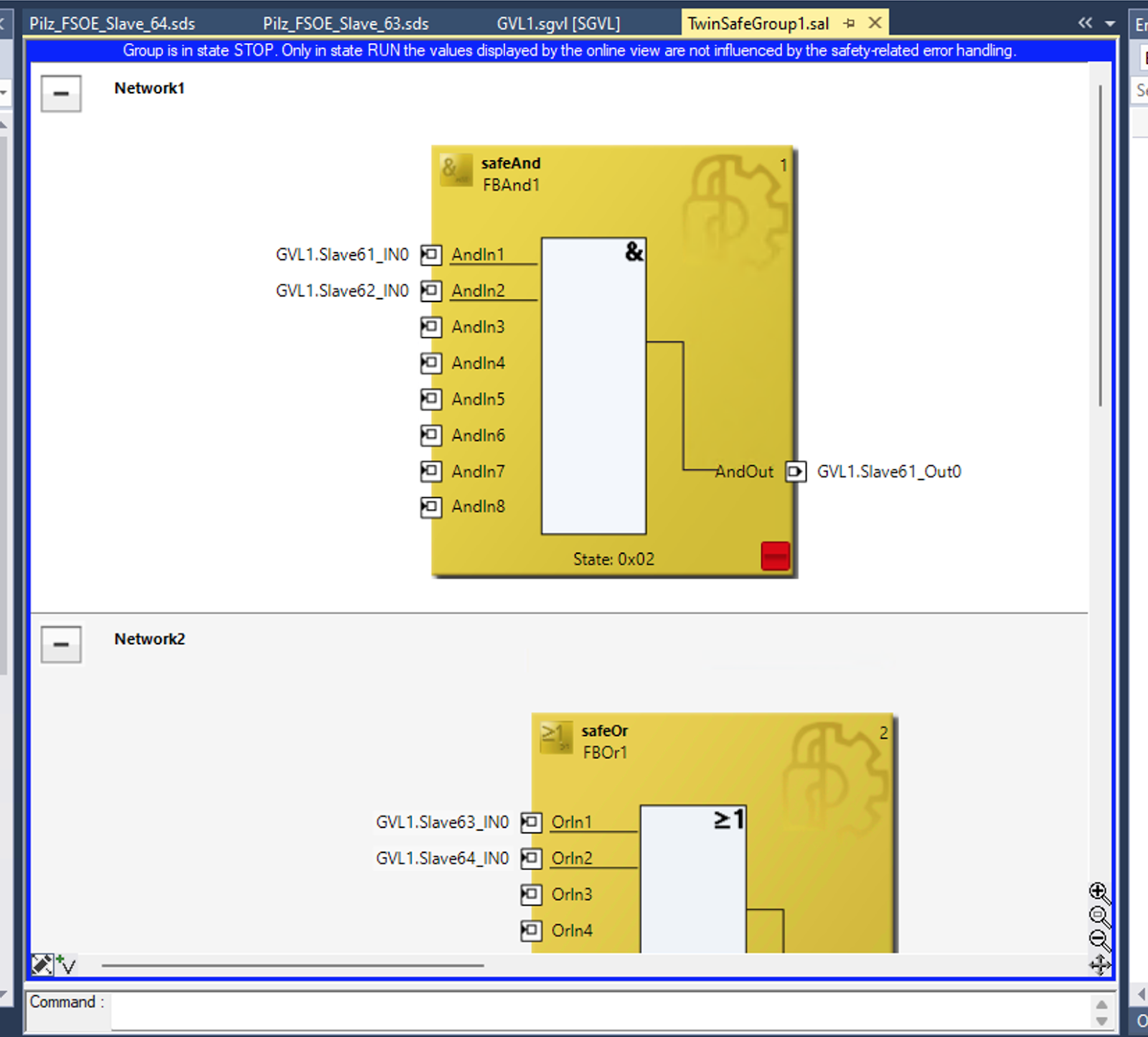
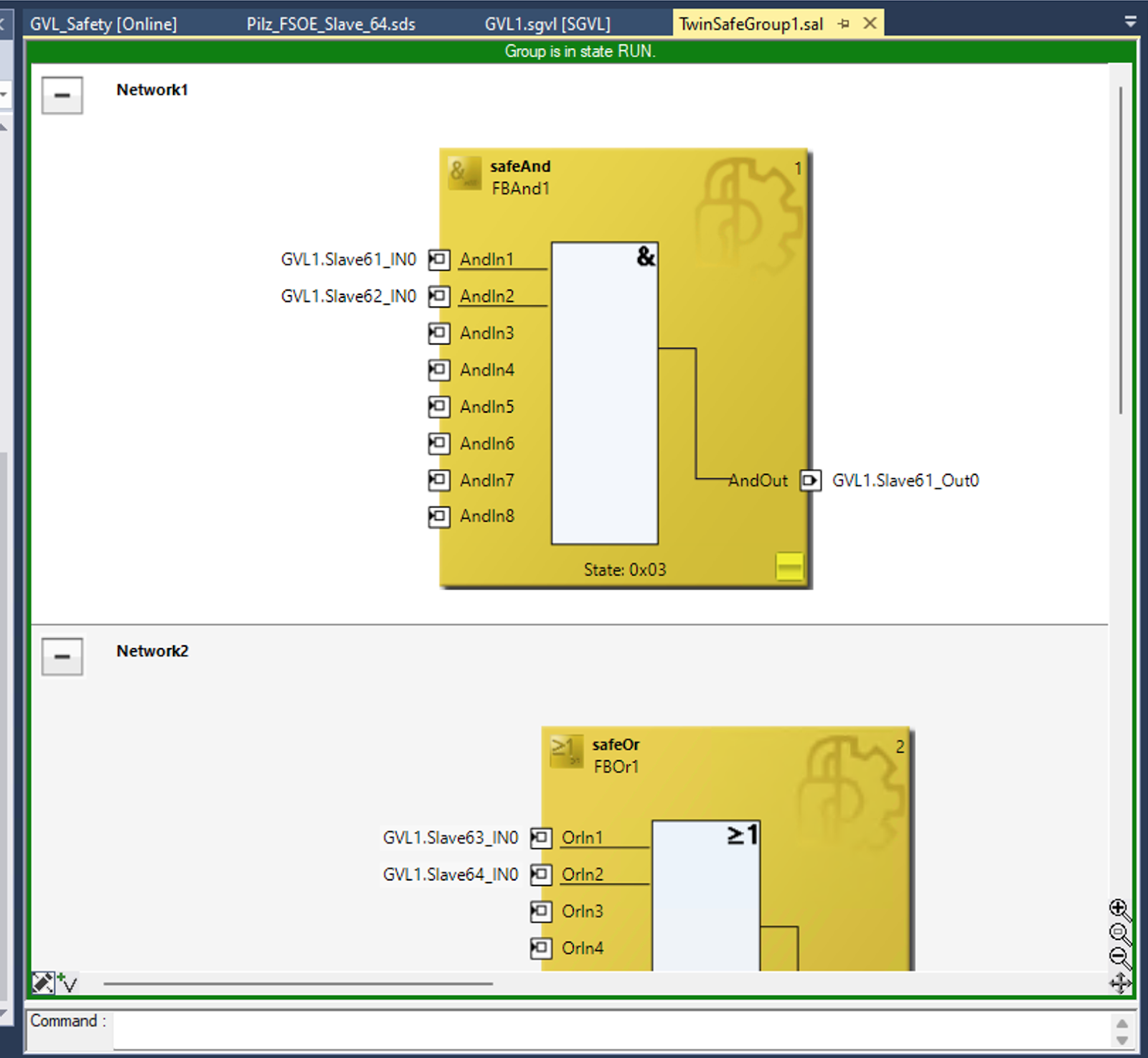
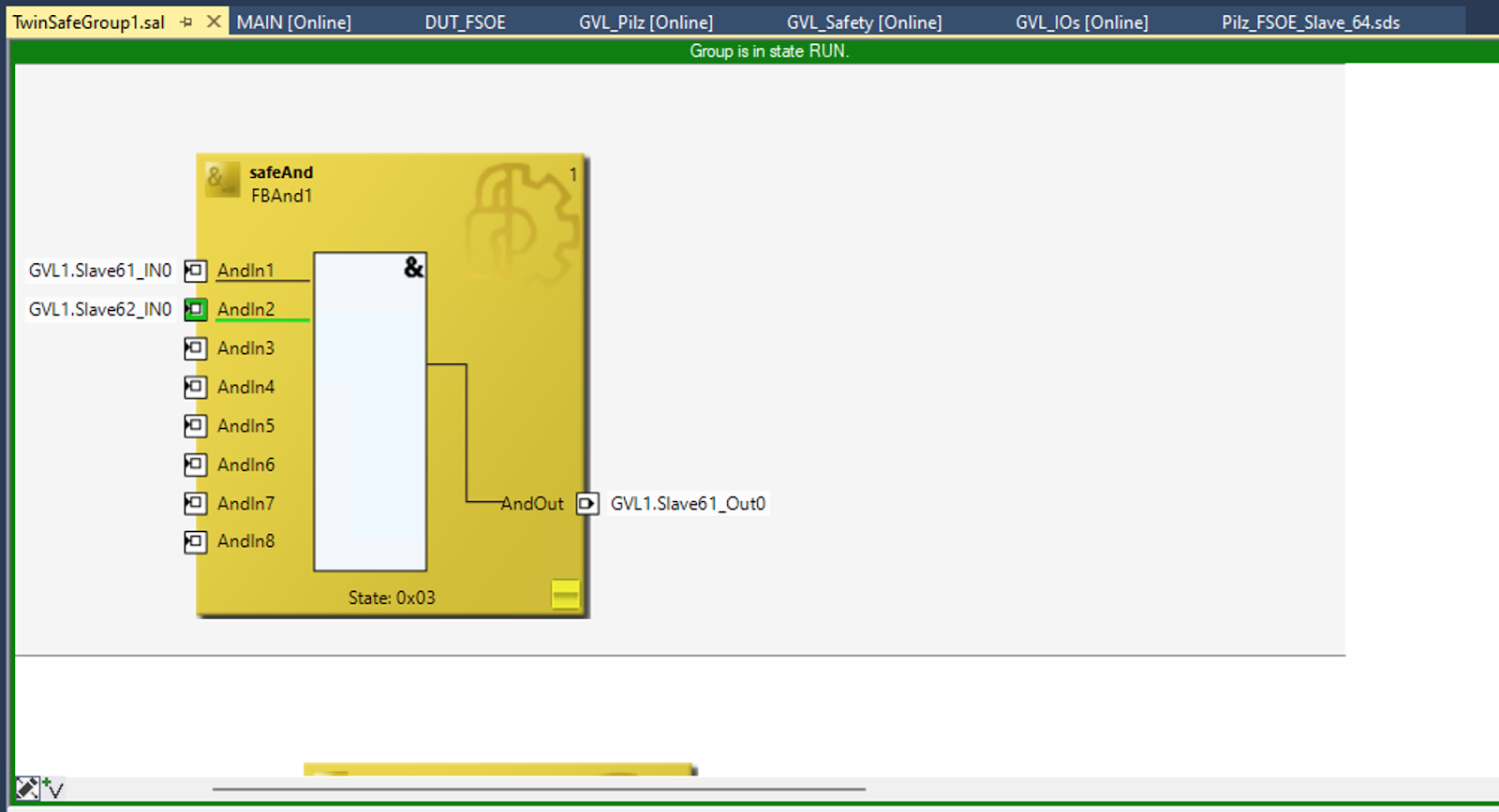
Network1
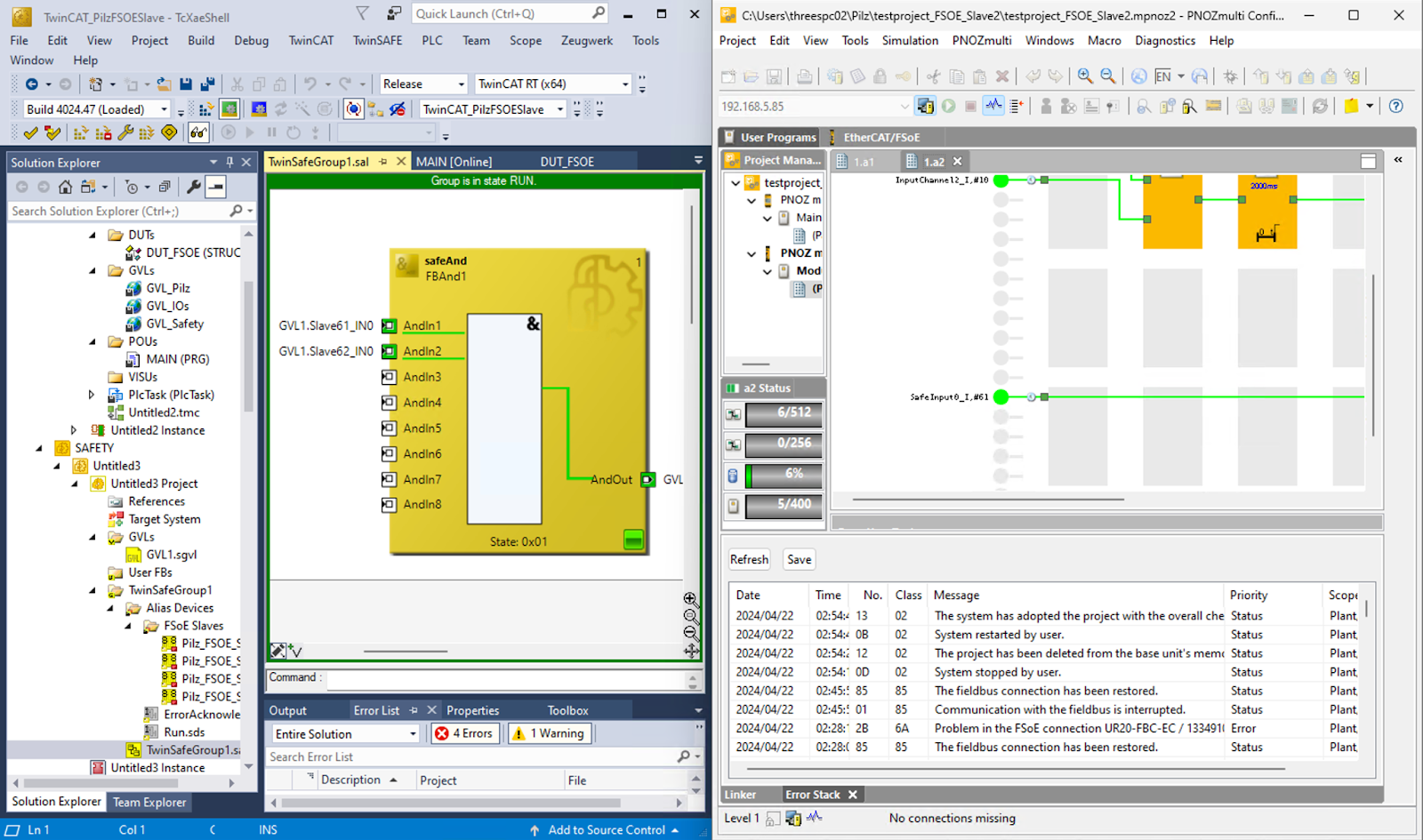
This is the TwinSAFE safety program editing screen.
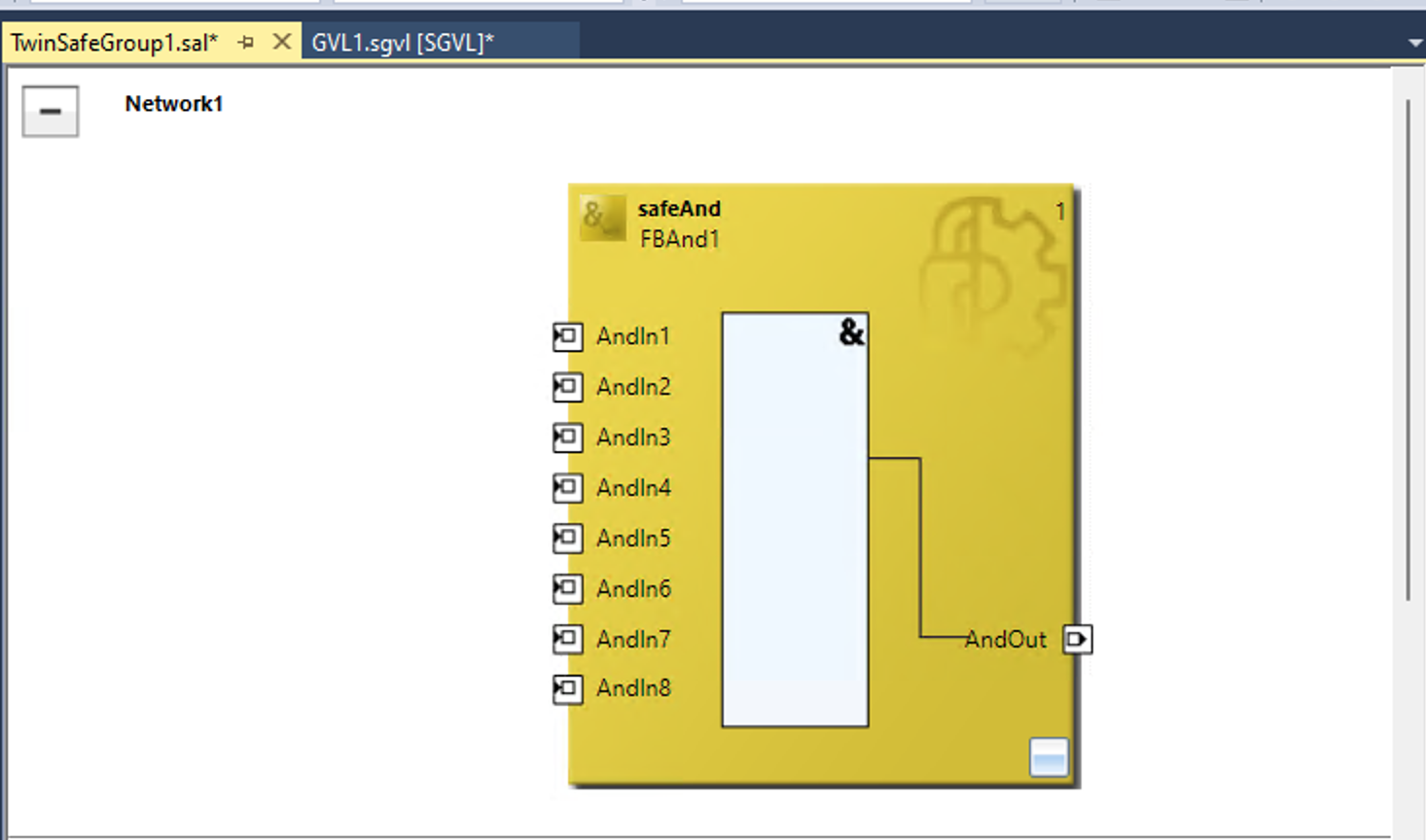
Add a SafAND Block from the bottom right.
Done!
Right click on input 1 of AndBlock>Change Link.
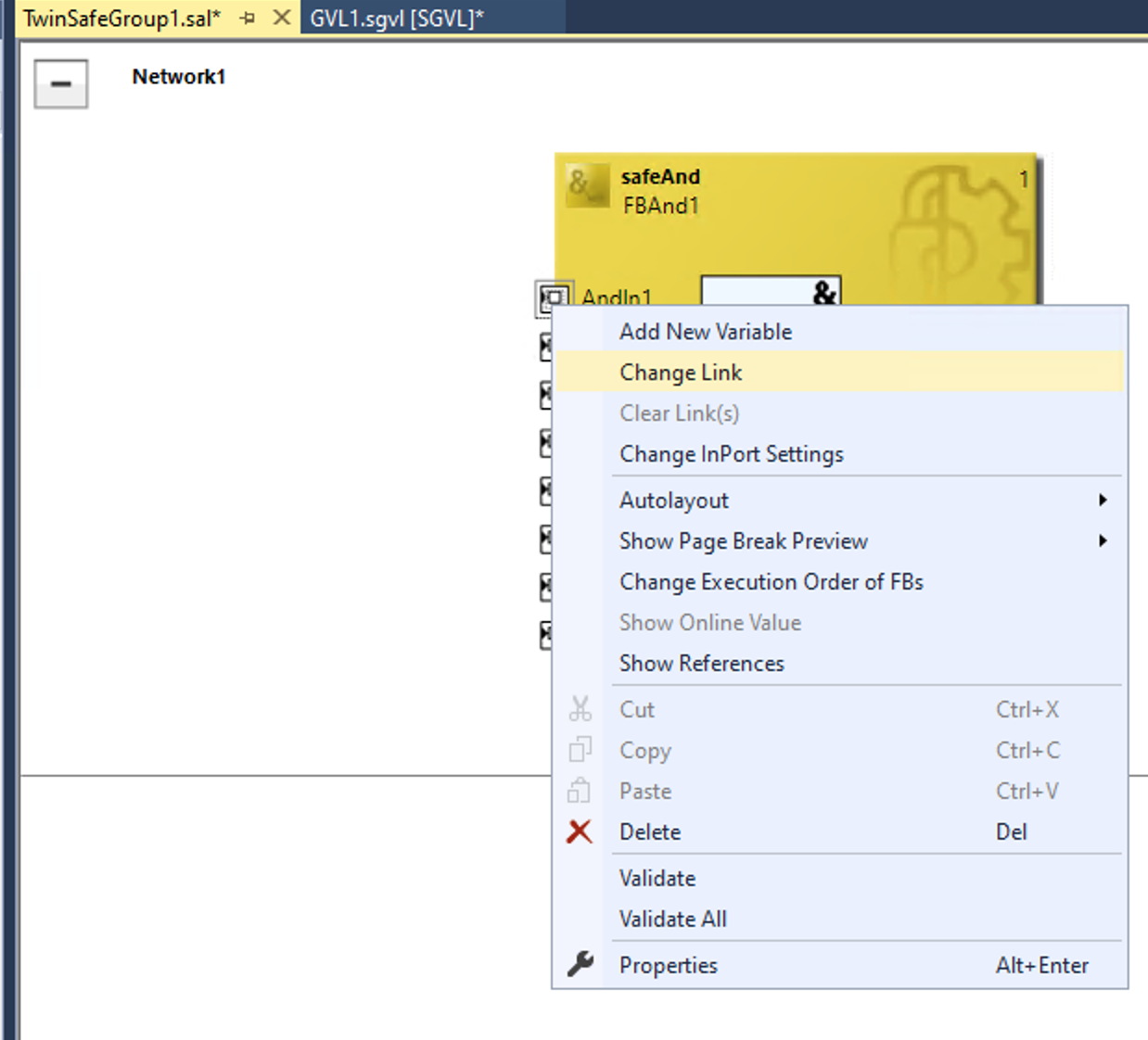
Let’s link this to the input data defined earlier in the GVL.
Done!
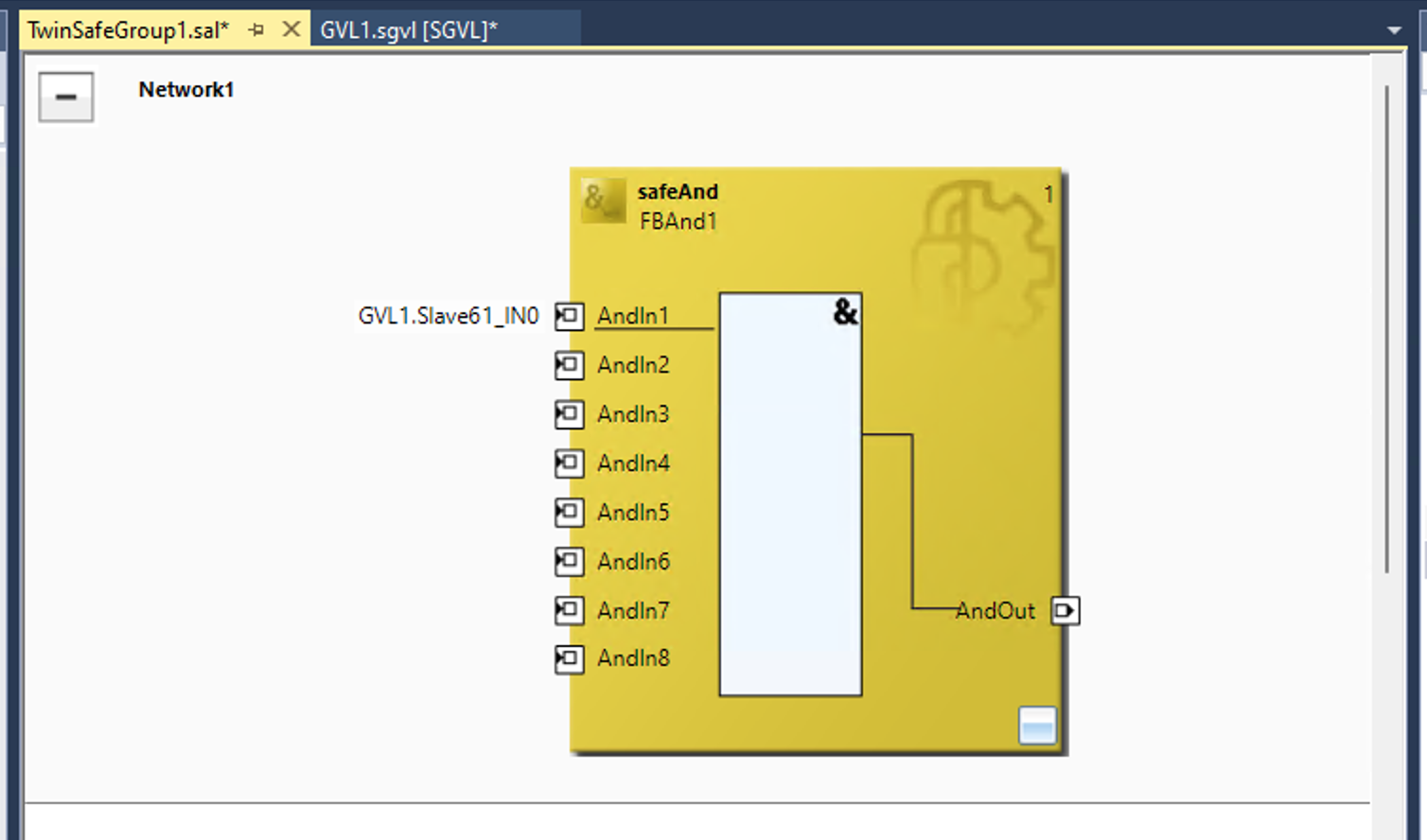
Let’s link the 0th Bool data of FSoE Slave addresses 61 and 62 as shown in the figure below.
Now right-click AndOut>Change Link to specify variables on the output side.
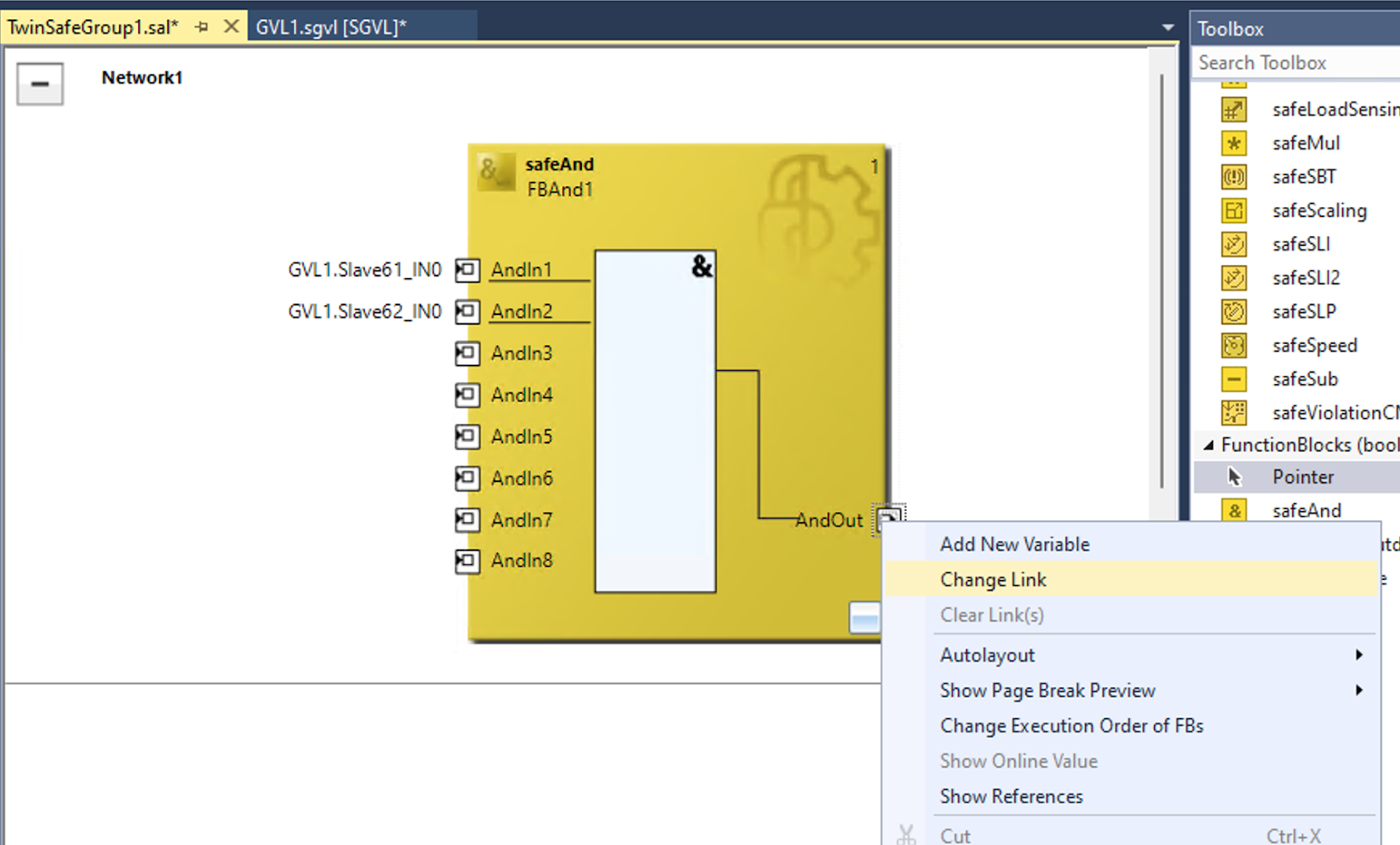
Set the 0th Bool data at FSoE address 61.
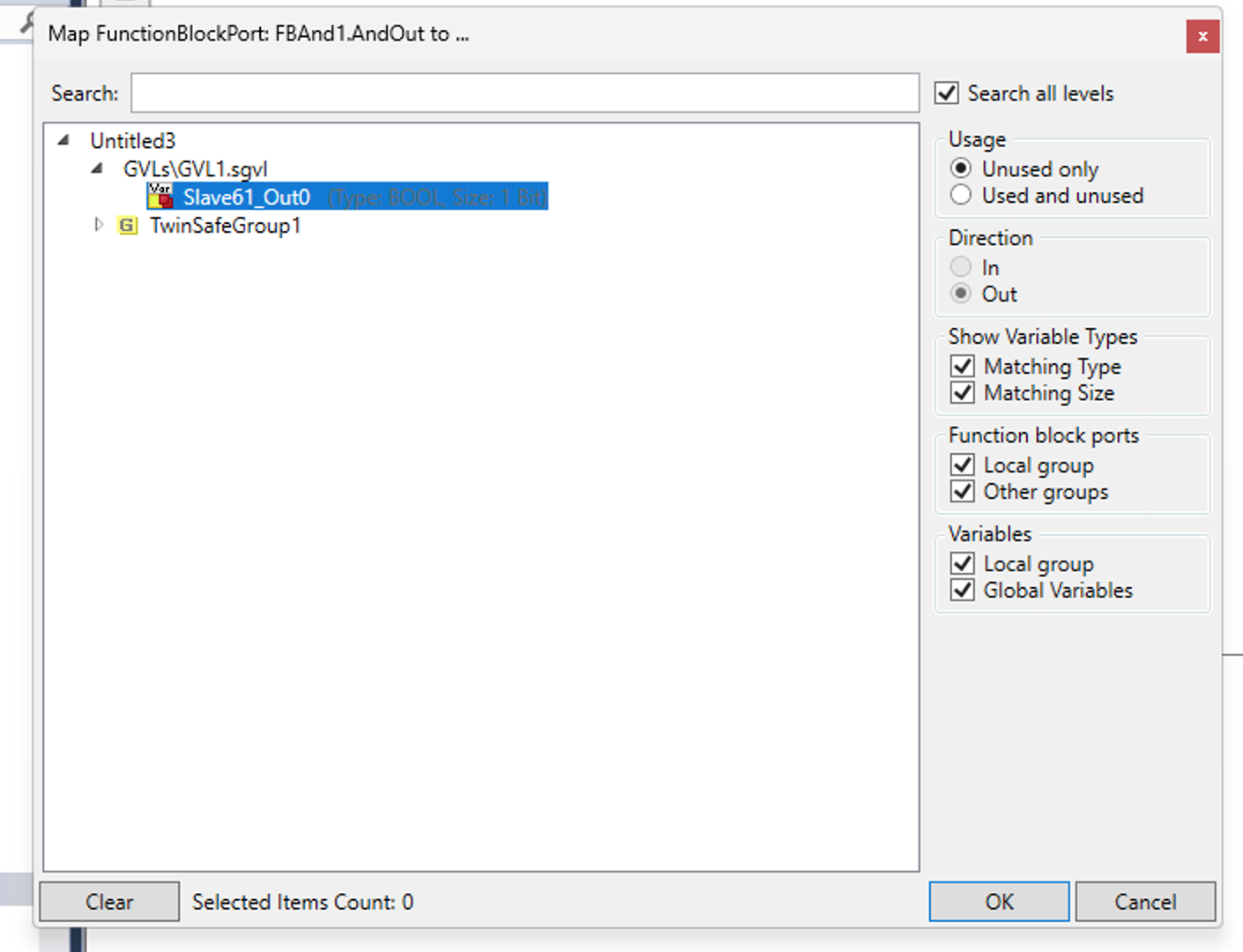
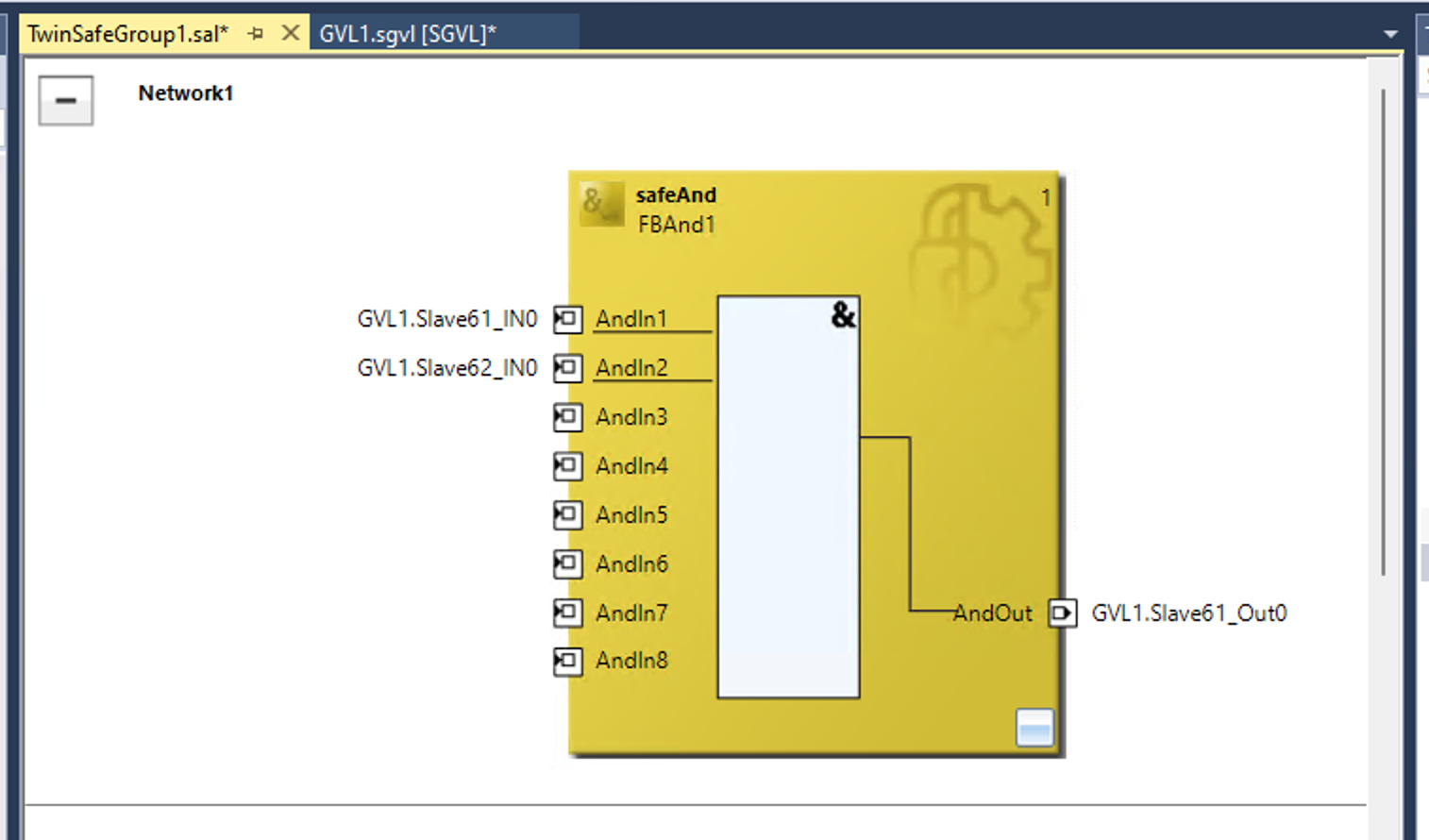
Done!
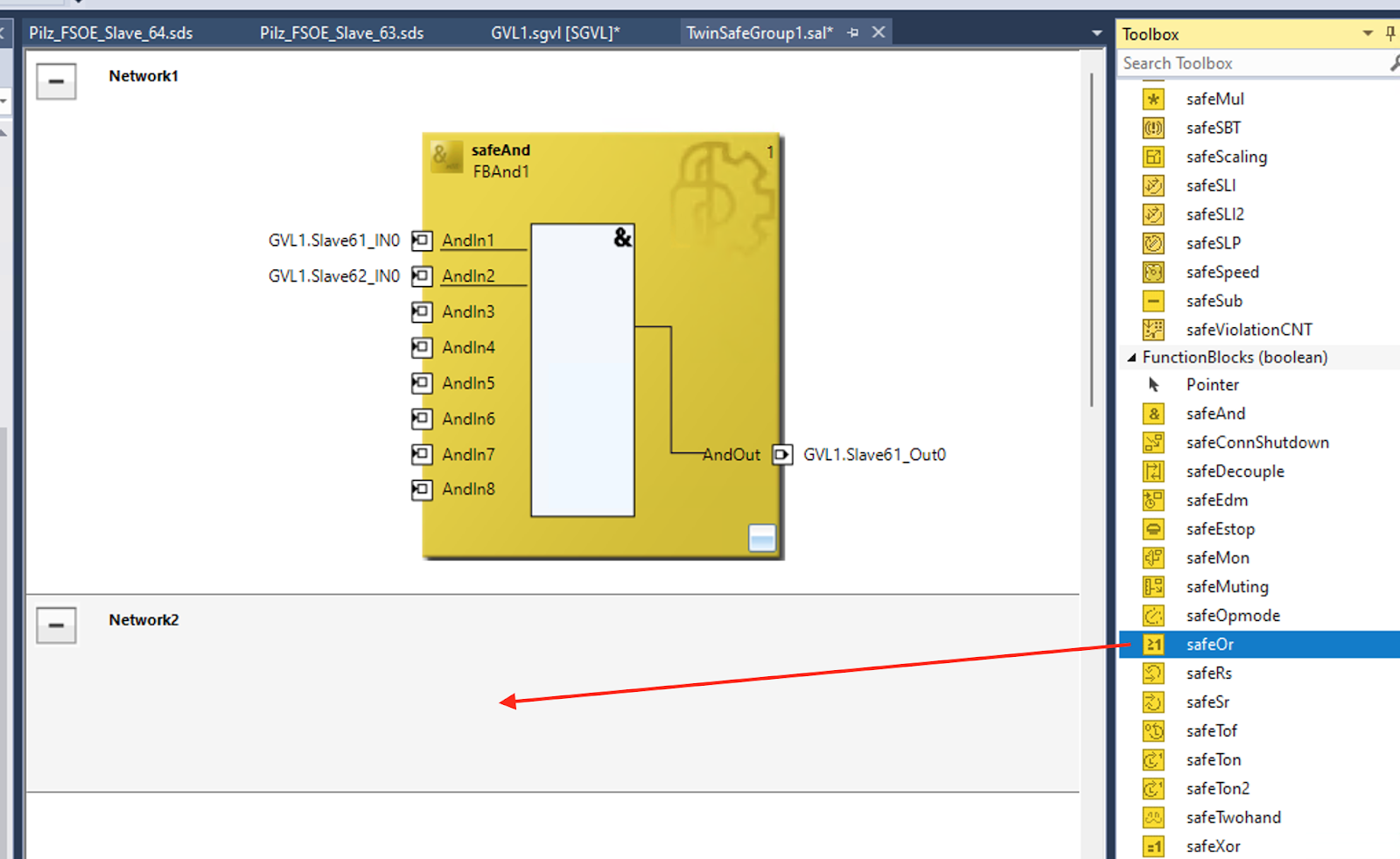
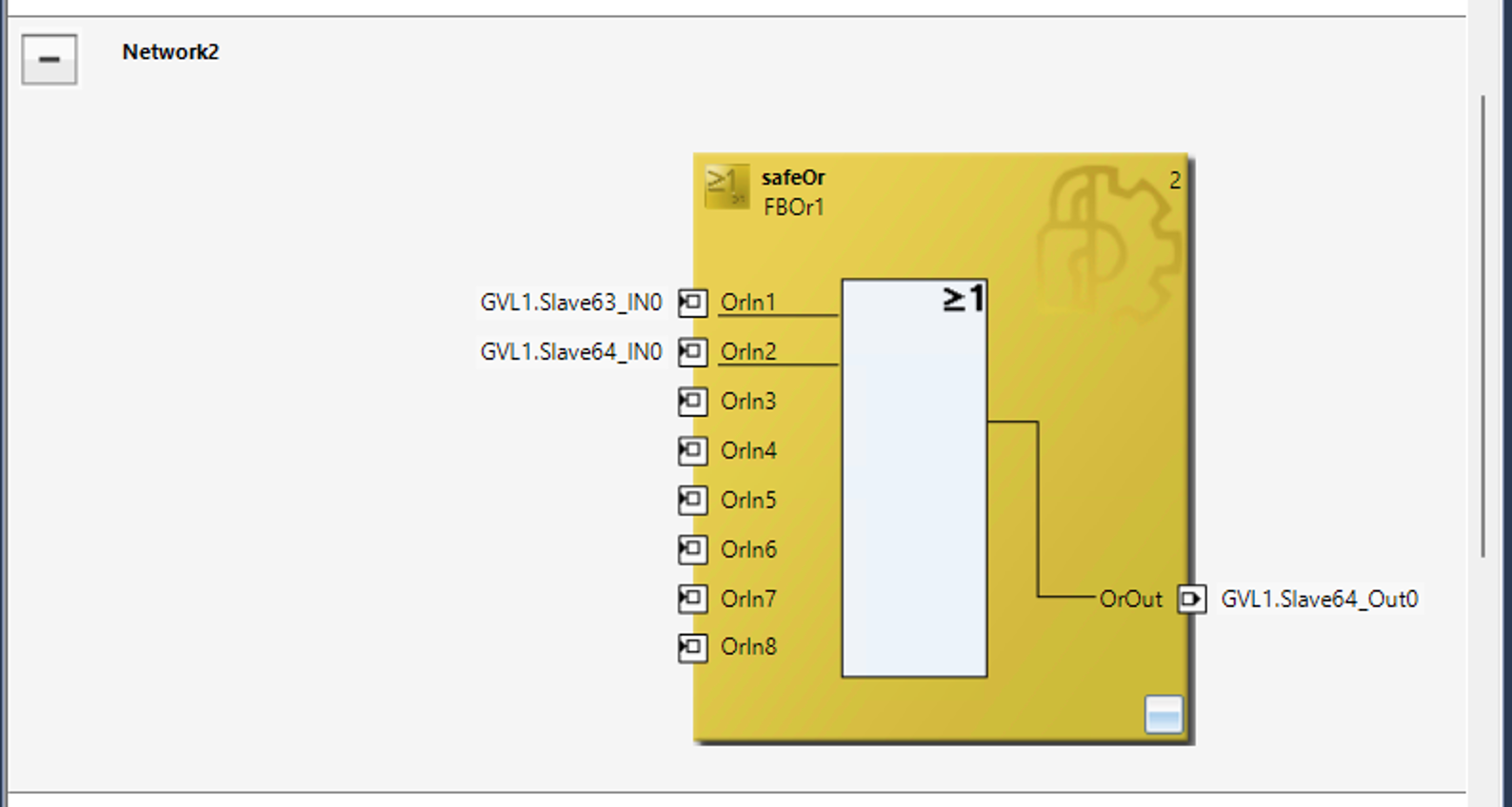
Network2
To add a new network, choose Connections>Network>Drop into the empty space in the Safety Program Editor.
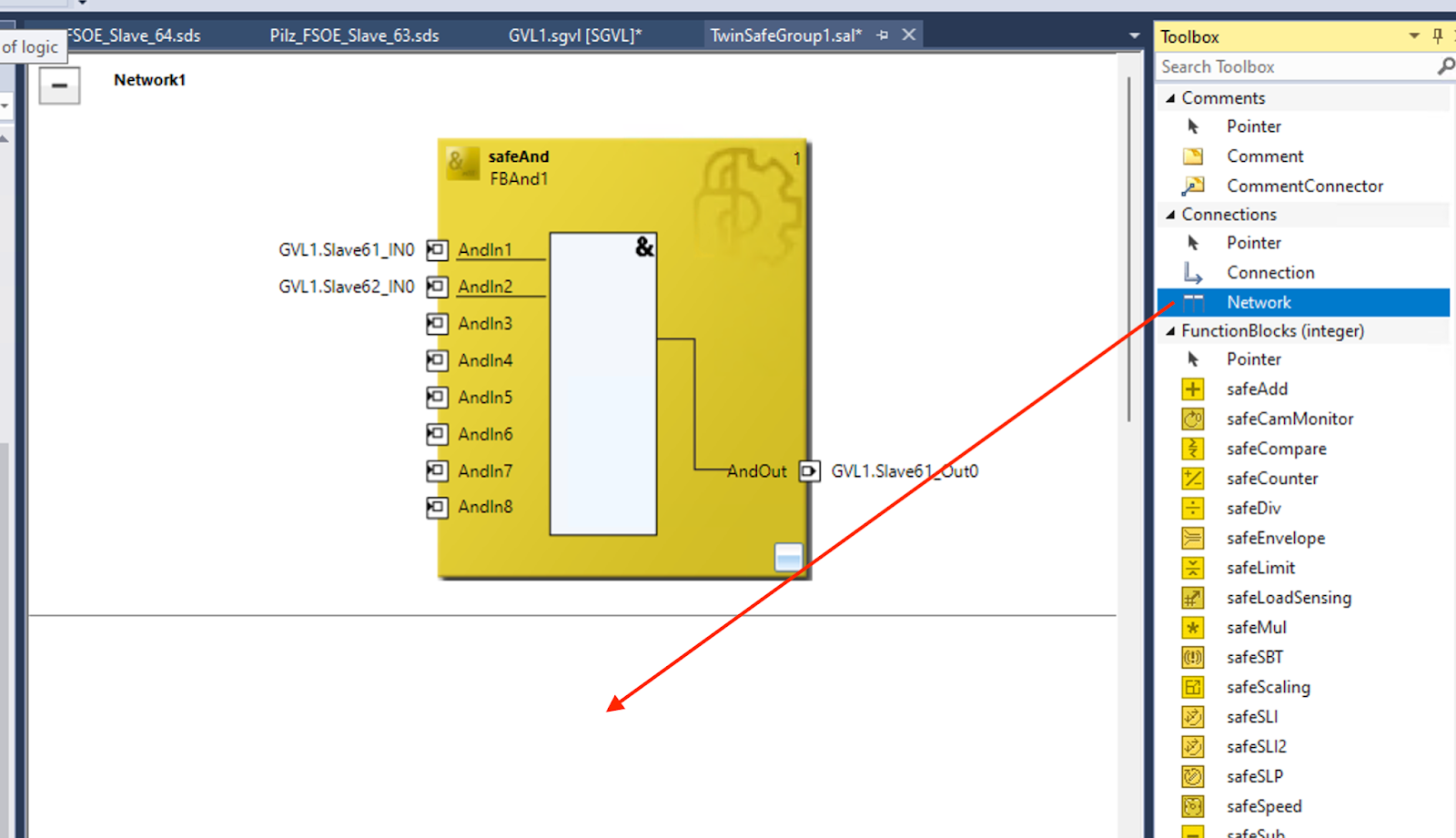
Done!New networks have been added.
Add the SafeOR Safety Block to your network from the Toolbox on the right.
Done!

Or Mapping the inputs and outputs of the Block.
Show TwinCAT Safety Toolbar
Click View>Toolbars>TwinCAT Safety to display the TwinSAFE Toolbar.
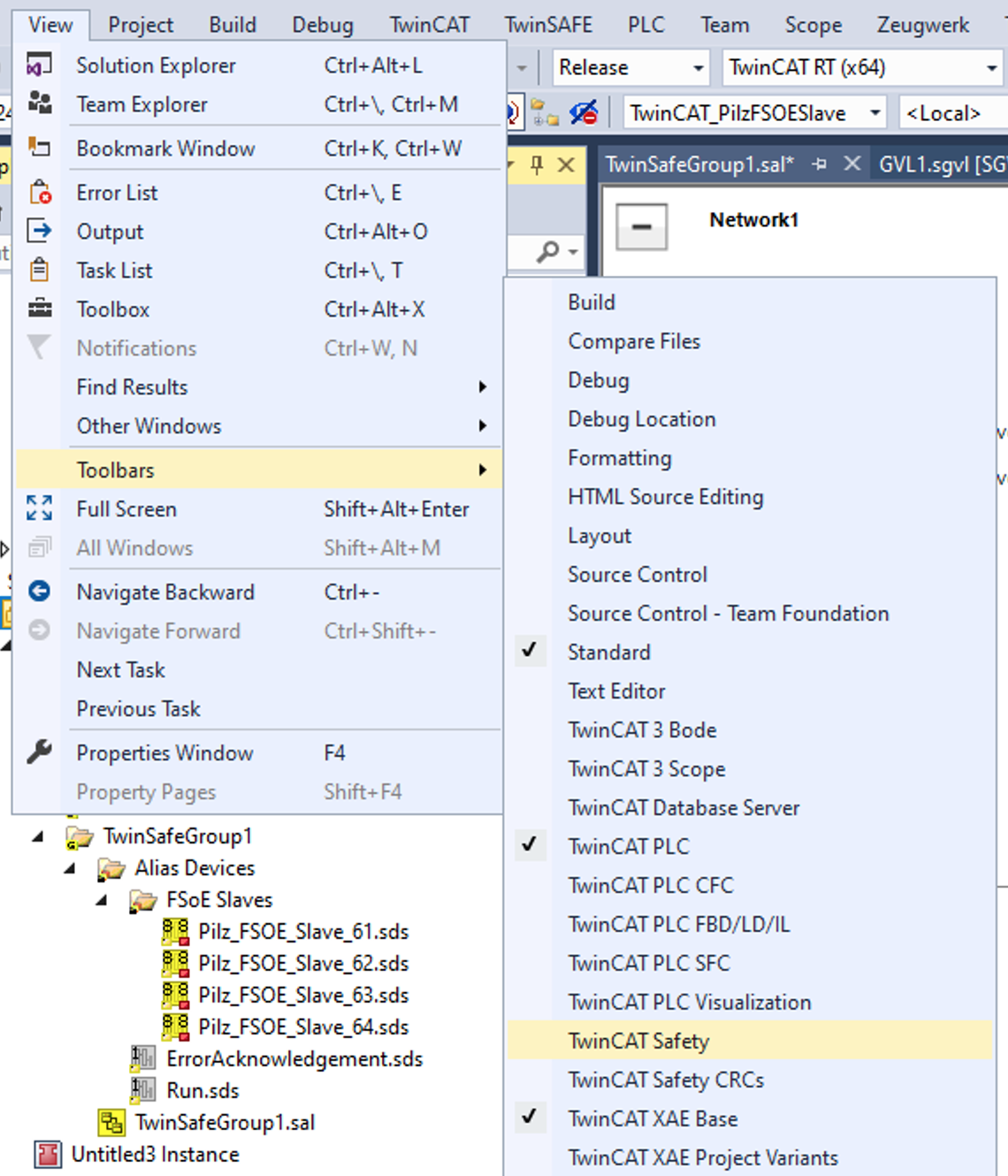
This is the Toolbar of TwinSAFE.
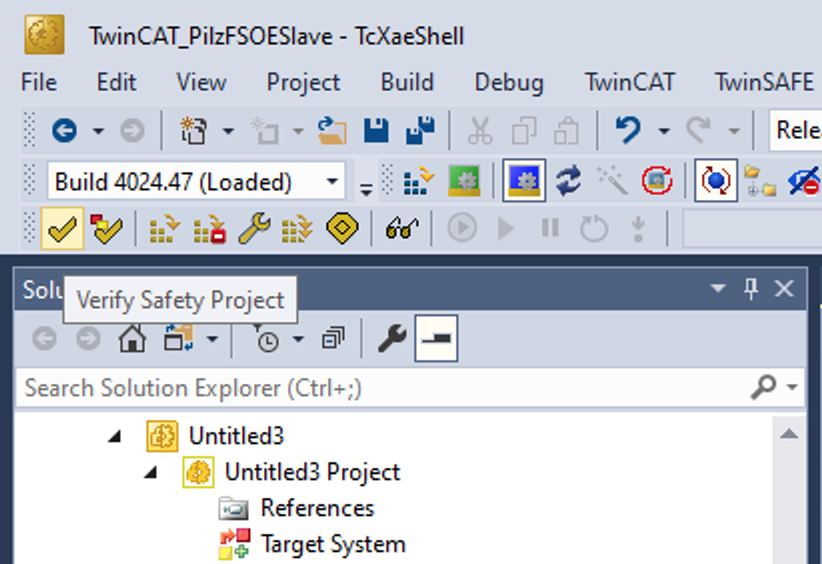
Verify Safety Project
Click Verify Safety Project to compile the safety project.
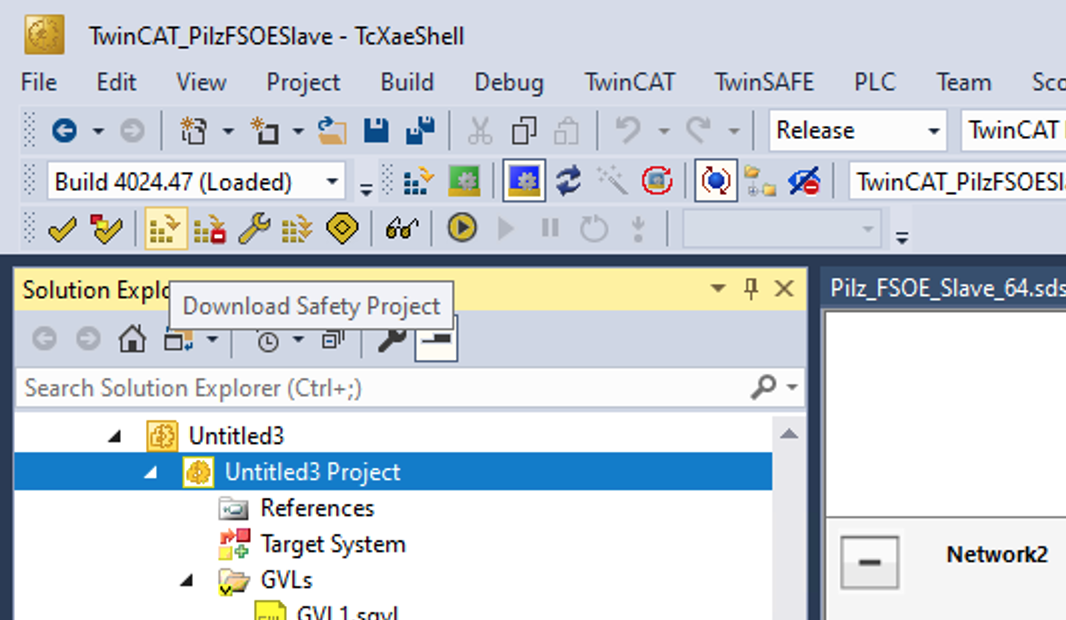
Download Safety Project
Next, let’s DOWNLOAD the safety project.
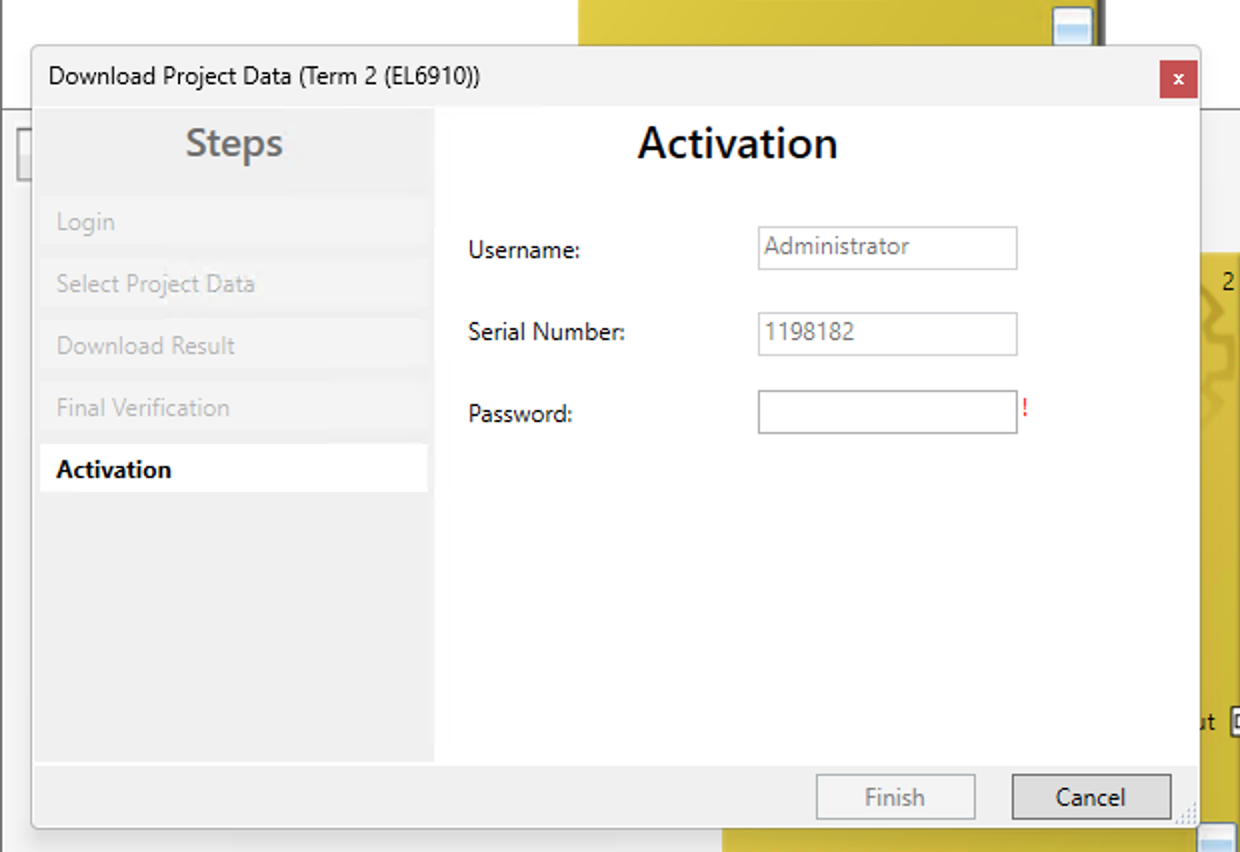
Enter UserName, Serial Number, and Password.
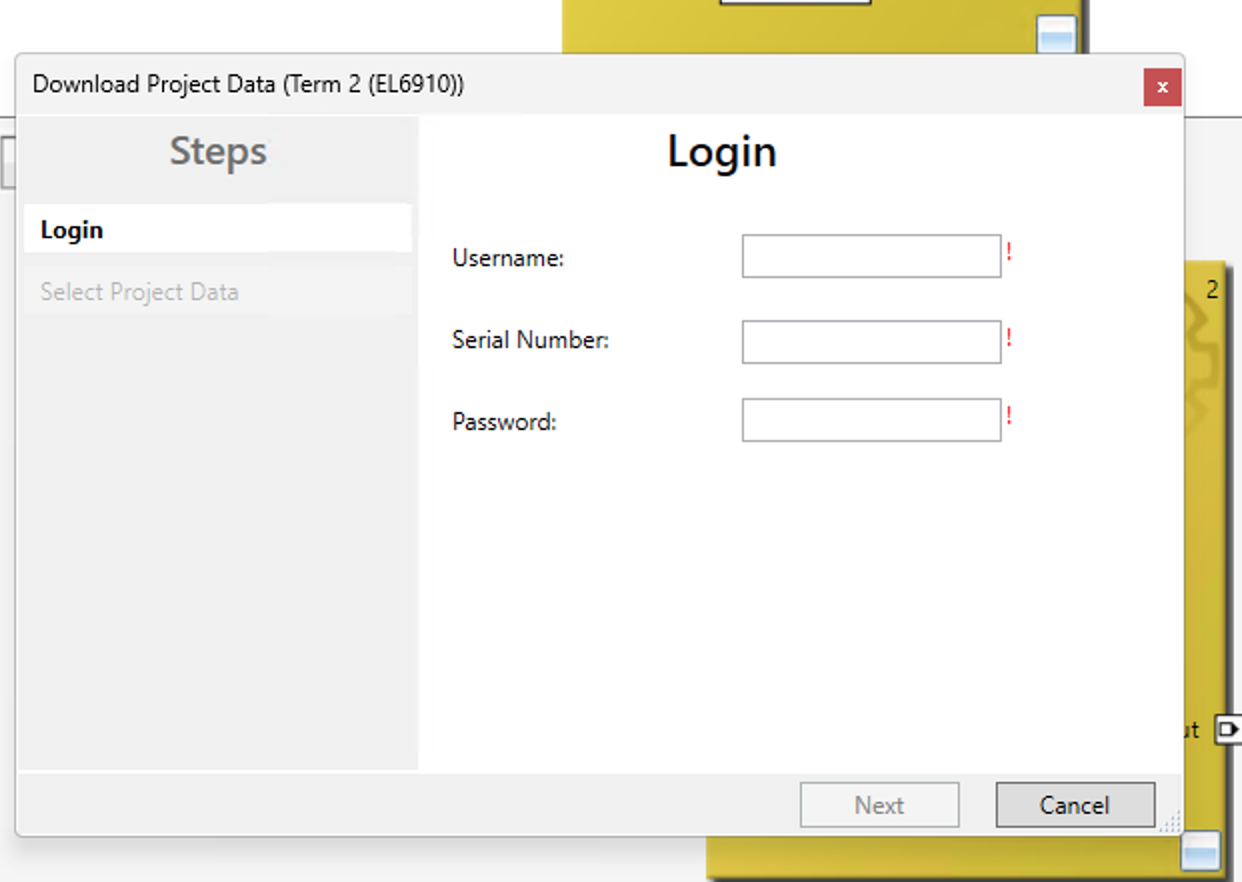
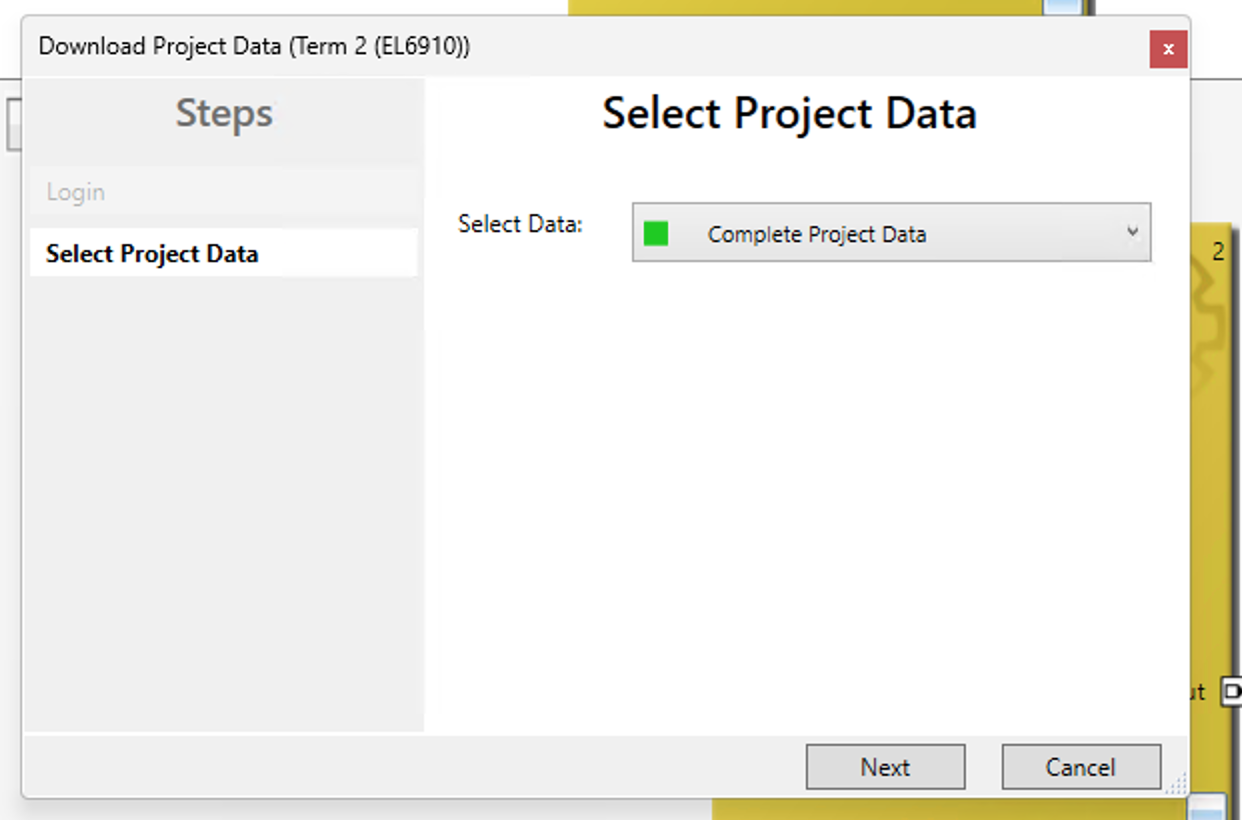
Select the data to be downloaded and press Next to proceed.
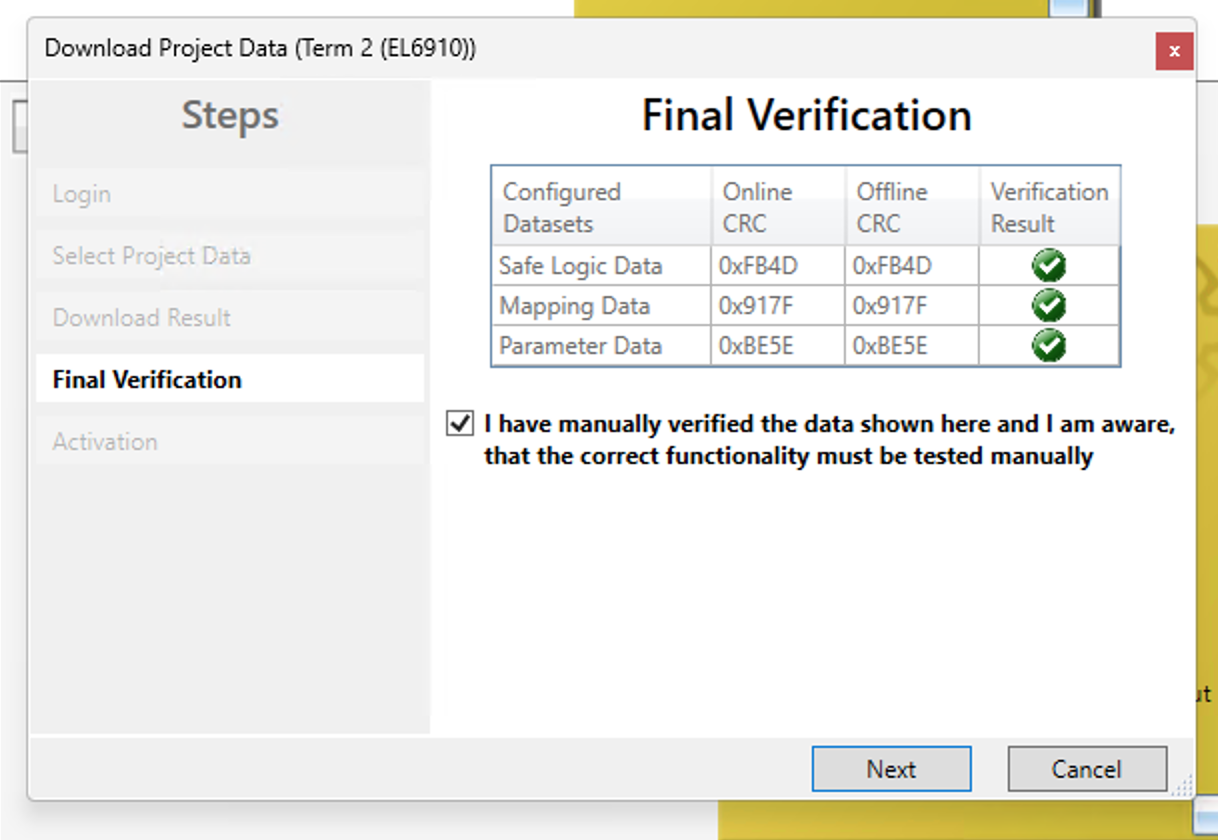
Proceed with Next>.
Enter your Password one last time.
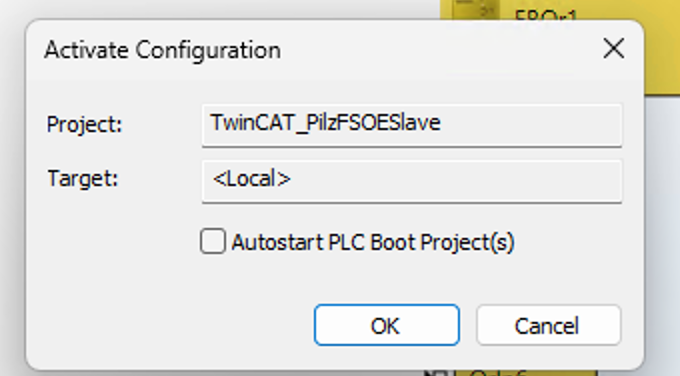
Activate Configuration
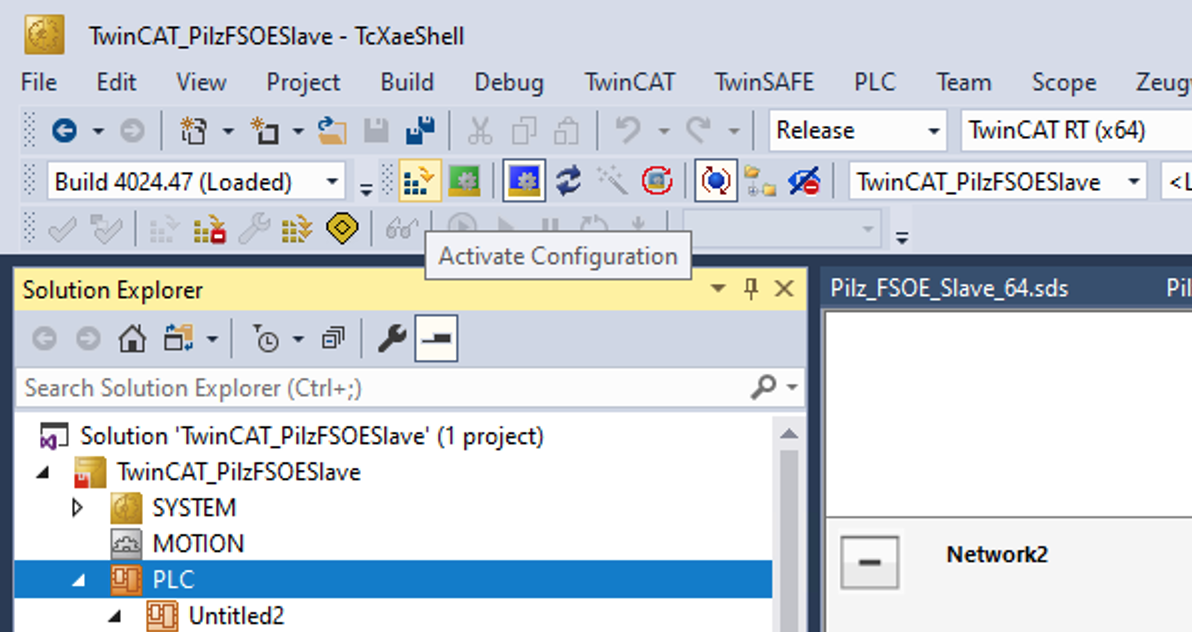
Click Activate Configuration to download the project to TwinCAT Runtime.
Proceed with Ok.
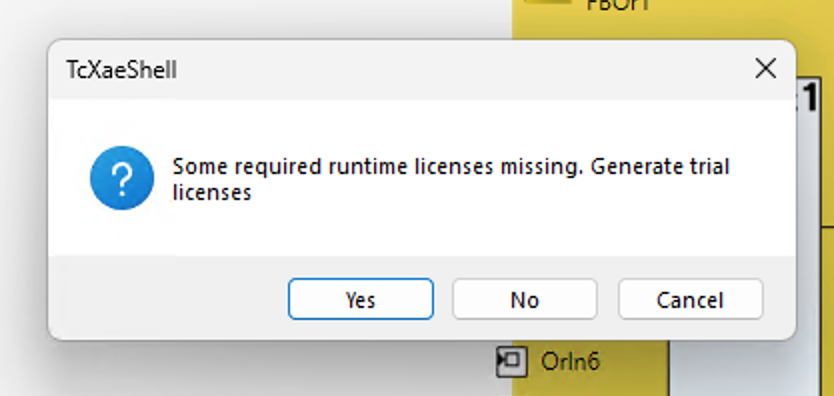
If you are missing a license, enter a free license.
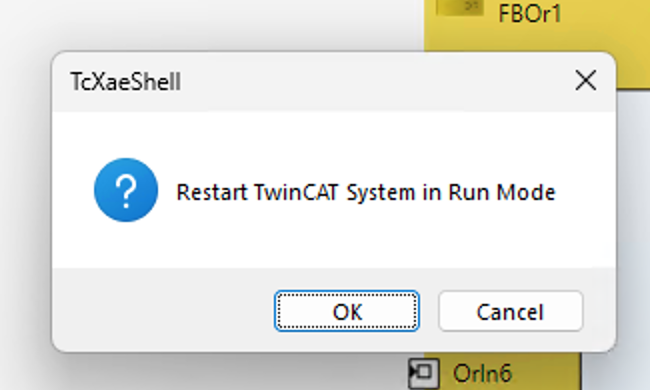
Switch TwinCAT Runtime to Run Mode.
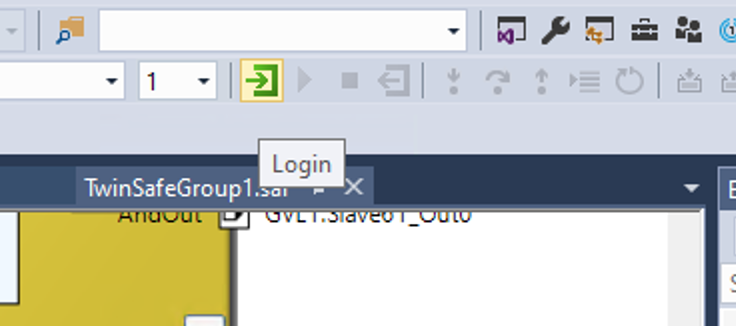
Login
Login to Runtime.
Yesで進みます。
Start
Start Runtime.

Result
First, click “Show Online Data” to monitor the safety project.
The safety project is currently in Stop status.
Set the Run variable to True.
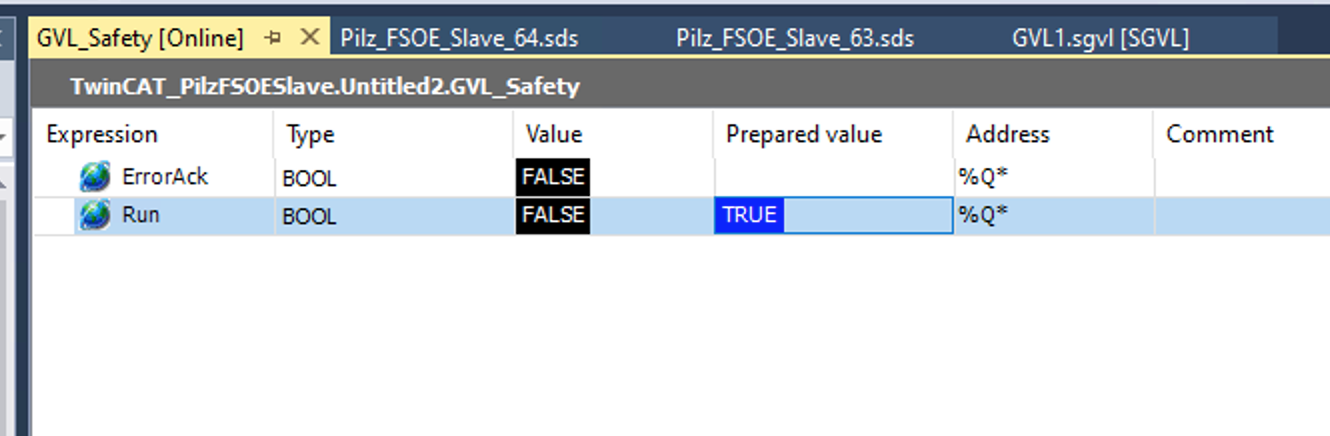
Done!Now the safety project has become RUN.
Next, let’s check the FSOE connections with the Pilz tool: open the FSoE Slave Configuration tab, and the four FSOE Slave Connections you just configured are also green, meaning they are communicating with the FSOE Master successfully.
At the same time, Pilz’s FSOE Master is successfully communicating with each Slave normally.
Data from the FSOE Slave was also confirmed.
You can see the actual operation in this video.